Onderwerpen:
- Sensoren voor het motormanagementsysteem bepalen en aanbrengen
- Krukaspositiesensor
- Pulswiel
- Mapsensor
- Koelvloeistoftemperatuursensor
- Lambdasonde
Sensoren voor het motormanagementsysteem bepalen en aanbrengen:
Het motormanagementsysteem vereist een aantal sensoren. Sensoren dienen als de “input” van het systeem. Sensoren zetten een natuurkundige grootheid om in een elektrisch –door een computer te verwerken- signaal, in dit geval de MegaSquirt.
In het assemblageproces van de MegaSquirt moet rekening worden gehouden met de op de motor te monteren componenten, omdat de opbouw van de MegaSquirt daarmee kan verschillen.
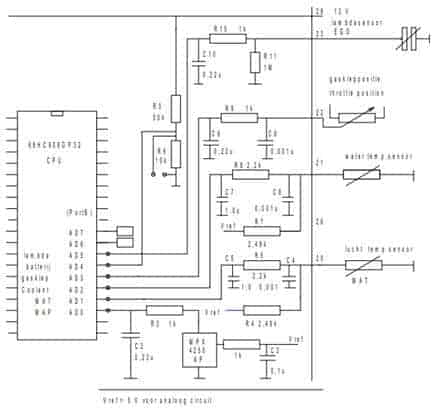
De afbeelding toont de verschillende sensorcircuits waarin deze componenten zich bevinden. De ingaande signalen die de figuur weergeeft zijn afkomstig van de lambdasensor, de gaskleppositiesensor, de koelvloeistoftemperatuursensor en de luchttemperatuursensor.
In het schema bevinden zich behalve de sensoren, ook een aantal weerstanden en condensatoren. De samenstelling van deze componenten vormen filters; deze filters dienen ervoor om stoorsignalen en ruis op te vangen. Wanneer het sensorsignaal door ruis vervormd wordt, kan dat grote gevolgen hebben voor de aansturing van de actuatoren, dus ook op het functioneren van de motor.
Krukaspositiesensor:
Een belangrijke input voor het motormanagementsysteem is het krukastoerental.
Het krukastoerental wordt gemeten met behulp van een krukaspositiesensor en een pulswiel. De krukaspositiesensor heeft twee belangrijke functies:
- Aan de hand van de frequentie van het signaal kan de het krukastoerental worden bepaald;
- De ontbrekende tand in het pulswiel geeft de krukaspositie aan waarin de zuigers van cilinder 1 en 4 een aantal graden voor het BDP staan.
Het motortoerental heeft invloed op de aansturing van de injectoren en de ontsteking. De ontbrekende tand in het 36-1 pulswiel is van belang om de ontsteking- en inspuittijdstippen te bepalen. Gekozen is om een Hall-sensor en niet de inductie-impulsgever te gebruiken als toerentalsensor. Een inductieve sensor wekt een wisselspanning op die in de MegaSquirt controller moet worden omgezet naar een gelijkspanning. Een Hall-sensor wekt een blokspanning op, die met een interne of externe pull-up weerstand wordt versterkt naar een spanning van 5 of 12 volt. Dat maakt de Hall-sensor geschikter om een betrouwbaar signaal te vormen. Voor het assembleren van de MegaSquirt moet die keuze wel van te voren worden gemaakt; beide sensoren vereisen een andere opbouw van de circuits.
Pulswiel:
De krukaspositiesensor meet een verandering van de luchtspleet van een op de motor bevestigd pulswiel. Op de Land Rover motor is origineel echter geen krukaspositiesensor en dus ook geen pulswiel aanwezig. Het pulswiel moest dus naderhand worden aangebracht. Er is lang nagedacht over de locatie en positie van het pulswiel. Mogelijkheden waren:
- Een schijf met 36 tanden die aan de buitenzijde van de krukaspoelie die wordt bevestigd door middel van een klem- of boutverbinding.
- Het aanpassen van de huidige krukaspoelie door tanden uit de poelie te frezen.
Gebruikelijk is om een 36-1 of een 60-2 pulswiel toe te passen. Het pulswiel met 60 tanden wordt voornamelijk gebruikt bij grotere diameters. De 36-1 is vanwege de tandbreedte geschikt om toe te passen. Het is van groot belang is dat het pulswiel zo min mogelijk hoogteslag heeft. Een hoogteslag betekent een verandering in het magnetisch veld tussen de sensor en de tanden van het pulswiel. Dat kan nadelige gevolgen hebben voor het draaien van de motor. Dat dient uiteraard voorkomen te worden. Het aanpassen van de huidige krukaspoelie had daarom de voorkeur. De buitenste rand van de bestaande krukaspoelie is bewerkt op een freesbank. Door middel van het wegnemen van materiaal zijn inkepingen ontstaan. De overgebleven 36 tanden dienen ervoor om de sensor de veranderingen van de magneetvelden te laten meten. Voor het referentiepunt is er een tand weggeslepen. De onderstaande afbeelding toont de bewerkte krukaspoelie.
Aan de bovenzijde van het pulswiel, recht onder de sensor is de weggeslepen tand zichtbaar. Wanneer de krukas in deze positie staat betekent dat niet dat de zuigers van cilinder 1 en 4 in het BDP staan, maar dat deze zuigers zich 90 graden vóór BDP bevinden, wat overeenkomt met 9 tanden (360/36). De MegaSquirt krijgt op het moment dat de ontbrekende tand voorbij komt het signaal dat de ontsteking binnenkort moet gaan plaatsvinden. Vanaf dat punt wordt berekend wanneer de bobine moet worden aangestuurd. Bij wisselende bedrijfsomstandigheden wordt aan de hand van dit referentiepunt ook het tijdstip van de voorontsteking bepaald.

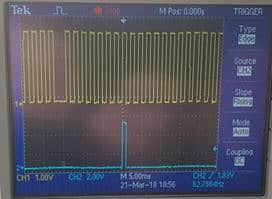
Het beeld van de oscilloscoop (zie afbeelding) laat het krukassignaal (boven) ten opzichte van het aanstuursignaal van de bobine (onder) zien. Bij de achtste tand na de ontbrekende is de aanstuurpuls naar de bobine gevormd. Tijdens het stationair draaien van de motor wordt de ontsteking 10 graden vervroegd, want neerkomt op 1 tand. Dat komt dus overeen met de 90 graden (9 tanden) tussen de weggenomen tand en het daadwerkelijke bovenste dode punt.
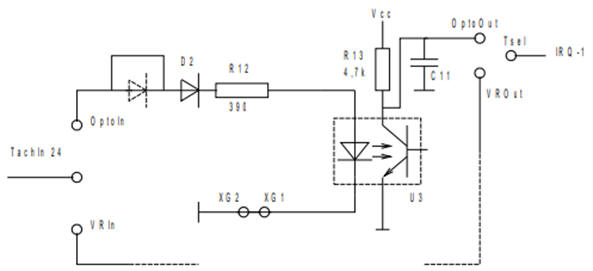
Voor het assembleren van het Hall-sensorcircuit in de MegaSquirt dienen condensator C11, weerstanden R12 en R13, diode D2 en opto-coupler U3 te worden geïnstalleerd (zie onderstaande afbeelding). Het signaal van de Hall-sensor komt in het schema in figuur 105 bij “Opto in” binnen. Via de diode en weerstand komt het signaal aan bij de zogenaamde opto-coupler. Dit component is met een onderbroken streeplijn aangegeven. De opto-coupler is een kleine geïntegreerde schakeling waarbij de LED aan de linkerzijde tijdens het branden de fototransistor aan de rechterzijde in geleiding brengt. De opto-coupler kan worden gezien als schakelaar zonder mechanische of elektrische verbindingen tussen het aanstuur- en schakelgedeelte.
Wanneer de transistor in de opto-coupler in geleiding is, kan er een kleine stroom van Vcc naar massa lopen. Op dat moment staat er een spanning van 0 volt op “Opto Out”. Als de transistor niet in geleiding is, dan is er geen stroom en dus ook geen spanningsval over weerstand R13. De spanning op “Opto out” bedraagt dan 5 volt.
Door het toepassen van een opto-coupler wordt er een galvanische scheiding gemaakt tussen de diode en de fototransistor. Gevaarlijke stoorspanningen worden hiermee buiten de microcontroller-schakeling gehouden, daar de doorslagspanning meestal groter is dan 5 kV.
MAP-sensor:
Een MAP-sensor (Manifold Absolute Pressure-sensor) meet de druk in het inlaatspruitstuk. De MegaSquirt berekent met deze druk, het motortoerental en de inlaattemperatuur de hoeveelheid lucht die de motor binnenkomt. Bij de Land Rover motor zal er een absolute druk (de buitenluchtdruk) of onderdruk gemeten worden. Het betreft namelijk een atmosferische motor die zijn lucht zelf aanzuigt. Motoren die uitgevoerd zijn met een turbo hebben te maken met overdruk in het inlaatspruitstuk. Het meetbereik van een MAP-sensor ligt meestal tussen de 0,2 en 1.1 bar.
De druk in het inlaatspruitstuk, samen met de openingshoek van de gasklep (dat wordt gemeten met de gaskleppositiesensor) en het motortoerental, kan de motorbelasting worden bepaald. Vanwege het ontbreken van een MAF-sensor (Manifold Air Flow) wordt de hoeveelheid aangezogen lucht berekend aan de hand van de motorgegevens en de onderdruk die in het inlaatspruitstuk heerst. Er is gekozen om geen gebruik te maken van een MAF-sensor, omdat het signaal minder betrouwbaar is doordat deze niet voor de motor is ontworpen. Het afstemmen van de instellingen op de inlaatspruitstuk-eigenschappen is complex. Hier zijn veel correctiefactoren voor nodig.
De toegepaste MPX4250AP MAP-sensor is in de afbeelding weergeven. De MegaSquirt printplaat is standaard uitgerust met aansluitmogelijkheden voor dit type MAP-sensor. Ook is deze sensor standaard meegeleverd in het bouwpakket. De hoeveelheid ingespoten brandstof is onder anderen afhankelijk van de hoeveelheid aanwezige lucht, omdat er getracht wordt naar een stoichiometrische mengverhouding (14,68kg lucht op 1 kg brandstof). Er was een mogelijkheid om geen gebruik te maken van zowel de MAF- als de MAP-sensor. De hoeveelheid aangezogen lucht zou dan volgens een zogenaamde Alpha-N regeling worden bepaald. Hierbij wordt naar de stand van de gasklep gekeken dat maatgevend is voor de hoeveelheid aanwezige lucht. Dit is echter minder nauwkeurig dan een MAP-sensor, dus is hier niet voor gekozen. In dit project wordt de gaskleppositiesensor slechts gebruikt voor de acceleratieverrijking.

Koelvloeistoftemperatuursensor:
Op het motorblok zijn in de klassieke opstelling nog geen temperatuursensoren aanwezig. De motor is standaard uitgevoerd met een bimetaal, die de functie heeft het dashboardlampje te laten branden bij een te hoge koelvloeistoftemperatuur. Omdat het motormanagementsysteem weldegelijk rekening houdt met de temperatuur van de koelvloeistof en de inlaatlucht, is ervoor gekozen om naderhand NTC-weerstanden te monteren. Een NTC-weerstand heeft een negatieve temperatuurcoëfficiënt. Dat wil zeggen dat de weerstandwaarde afneemt naar mate de temperatuur toeneemt. Als koelvloeistoftemperatuursensor is gekozen voor een sensor die een weerstandwaarde van 2,5 kilo-ohm bij 25⁰ Celsius heeft. Hierbij is de weerstandverandering het grootst in het meest belangrijke temperatuurbereik. De eigenschappen van de NTC-weerstand moeten wel in kaart worden gebracht om een correcte temperatuur te berekenen.
De weerstandverandering is bij een verandering in het temperatuurbereik tussen 0⁰C en 60⁰C het grootst. Dit is te zien aan het verloop van de karakteristiek; in het genoemde temperatuurbereik vindt er een weerstandafname van ongeveer 5kΩ plaats, terwijl bij T ≥ 60⁰C de weerstand nauwelijks afneemt. Het is in sommige gevallen wenselijk om ook temperaturen boven de 60°C te meten. Om dit mogelijk te maken kan bij een bepaalde temperatuur de interne biasweerstand worden omgeschakeld naar een biasweerstand van een andere waarde. Hiermee worden twee NTC-karakteristieken verkregen. Echter, in dit project wordt de koelvloeistoftemperatuur uitsluitend gebruikt voor de koude start verrijking, die boven de 60°C nauwelijks meer wordt toegepast.
De lage temperaturen zijn ook het meest interessant; hierin zal er koude start verrijking plaatsvinden; de injector wordt bij koude motor langer aangestuurd. Wanneer de motor voldoende is opgewarmd (T ≥ 60⁰C) vindt er steeds minder verrijking plaats. Vanaf een T = 90⁰C verloopt de inspuitstrategie volgens de ingestelde waarden in het referentieveld. Het referentieveld is een standaard ingevoerde waarde. Externe factoren, zoals een koude start verrijking bij een lage temperatuur, vormen een correctiefactor op deze standaard waarde. Hierbij houdt de MegaSquirt geen rekening meer met de koelvloeistoftemperatuur.
Lambdasonde:
In de uitlaat wordt een lambdasonde (sensor) gemonteerd die de lucht- / brandstofverhouding in de uitlaatgassen meet. De lambdasonde heeft een belangrijke taak om in een later stadium het motormanagement te “tunen” door de AFR- en VE-tabellen in te vullen. Om inzicht te krijgen in de ideale mengverhouding en het nut en de noodzaak om te verrijken of te verarmen, worden eerst de stoichiometrische mengverhouding, verrijking en verarming gedefinieerd.
De stoichiometrische mengverhouding geeft de verhouding tussen lucht en brandstof aan waarbij alle zuurstof uit de lucht wordt gebruikt. Dit is het geval bij de verhouding 14,68:1 (afgerond als 14,7 kg lucht op 1 kg benzine). We spreken dan over λ = 1.
Bij verschillende bedrijfsomstandigheden kan de lambdawaarde variëren:
- Verrijken: λ < 1;
- Verarmen: λ > 1.

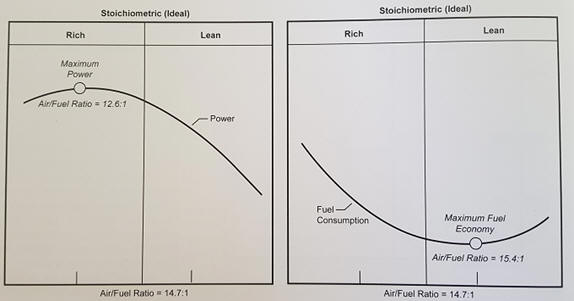
Het verrijken naar λ = 0,8 betekent dat er een mengverhouding van 11,76 kg lucht op 1 kg benzine van toepassing is. Er is dus minder lucht aanwezig om 1 kg brandstof te verbranden. Het verrijken of verarmen van het mengsel moet altijd binnen de explosiegrenzen blijven. Verrijking vindt plaats wanneer de motor meer vermogen moet leveren. Tevens zorgt een rijker mengsel voor koeling. Een arm mengsel daarentegen, geeft een gunstiger brandstofverbruik. De onderstaande afbeelding laat twee grafieken zien waarin het maximale vermogen en het laagste brandstofverbruik zijn getoond.
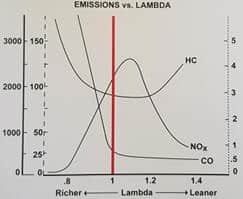
De lambdawaarde heeft niet alleen invloed op het vermogen en het brandstofverbruik, maar ook op de uitlaatgasemissies. Een rijker mengsel zorgt voor een lager NOx-gehalte, maar ook voor een hogere CO- en HC-uitstoot. Bij een armer mengsel liggen de brandstofdeeltjes verder uit elkaar, waardoor de verbranding niet meer optimaal is; met als gevolg dat de HC-uitstoot eveneens stijgt. In de onderstaande afbeelding worden de emissies getoond die betrekking hebben op de lambdawaarde. Bij het toepassen van een katalysator is het gewenst om de inspuiting constant wisselend rijk en arm te laten verlopen. Bij een rijk mengsel wordt CO gevormd als gevolg van een zuurstoftekort, waarmee de katalysator de NOx reduceert. Een arm mengsel bevat een overschot aan zuurstof, waarmee CO en HC worden geoxideerd.
Er bestaan twee typen lambdasensoren; de sprongsensor en de breedbandsensor. De MegaSquirt ondersteund beide types. Echter, bij het instellen van de VE-tabel is een sprongsensor ongeschikt en is daarom de keuze gemaakt om de breedbandsensor toe te passen. Het instellen van de VE-tabel geschiedt door het aanpassen van de VE-waarden aan de gemeten AFR. Alhoewel de VE-waarden in beginsel middels berekeningen en grotendeels aan de hand van het koppelverloop kunnen worden ingevuld, ligt de AFR al snel buiten het bereik van de sprongsensor. Een breedbandsensor biedt vanwege zijn grote meetbereik een uitkomst; deze kan een AFR tussen de 8,0 en 1,4 meten. De mengselsamenstelling zal zich bij een draaiende motor in bijna alle gevallen wel in dit meetbereik bevinden, dus is de breedbandsensor geschikt voor het instellen van de VE-tabel. Het tunen zonder de breedbandsensor is praktisch onmogelijk.
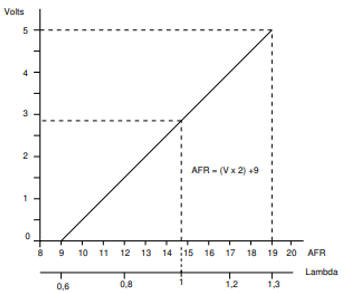
De MegaSquirt beschikt niet over een interne lambdacontroller. Wanneer de eigenschappen van de breedbandsensor bekend zijn, kunnen deze in het programma TunerStudio in een tabel ingevuld worden. In andere gevallen is een breedbandsensor met externe controller nodig. De uitgangsspanning is door de externe controller lineair gemaakt. De uitgangsspanning van de controller naar de MegaSquirt bedraagt tussen de 0 en 5 volt, waarbij de verhouding tussen de lambdawaarde en het voltage een lineair verloop heeft. De spanningswaarde wordt in de MegaSquirt omgerekend naar een lambdawaarde. De afbeelding toont de grafiek met het lineaire verloop.
Volgende: Actuatoren.