Onderwerpen:
Inleiding:
Voor de werking van de synchrone elektromotor is het essentieel dat de de juiste spoelen door de inverter worden aangestuurd. Om te bepalen welke spoel (U, V of W) er moet worden bekrachtigd, leest de inverter-ECU de stand van de rotor af, welke door de rotorpositiesensor, ook wel de “resolver” genoemd, is gemeten.
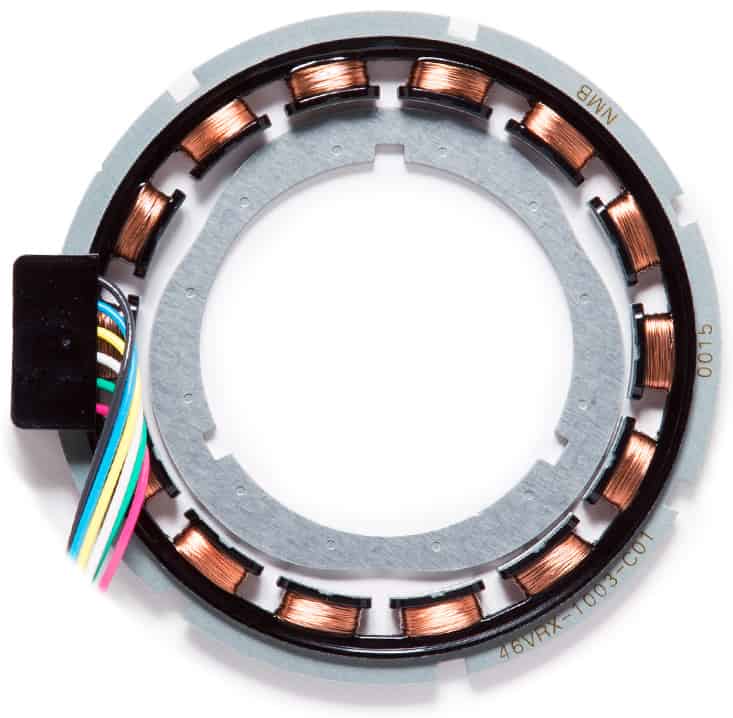
De resolver bestaat uit een buitenring met een aantal spoelen aan de binnenzijde een roterende excentrische plaat. De afstand tussen de excentrische plaat en de spoelen verandert voortdurend wanneer deze roteert.

Signalen van de resolver:
De ECU voorziet de resolver van een referentiesignaal. De luchtspleet tussen een spoel en het excentriek creëert een hoge of lage sinusvormige wisselspanning. Bij een hoge amplitude in het rode of groene sinusvormige signaal (zie de onderstaande afbeelding) is de luchtspleet tussen het excentriek en de spoel klein.
De resolver functioneert zowel in stilstand als tijdens het draaien van de elektromotor: in beide gevallen moet de ECU weten in welke stand de rotor zich bevindt.
De onderstaande afbeelding weergeeft de theoretische signalen. In werkelijkheid is de frequentie een stuk hoger, waardoor de variatie in de amplitude van de sinus- en cosinussignalen duidelijk te is te zien.

De onderstaande twee afbeeldingen weergeven een werkelijke meting op een resolver. Ook hier zien we bovenin het referentiesignaal, daaronder de sinus- en cosinussignalen. De eerste afbeelding is in stilstand: de elektromotor draait niet. De hoogte van het sinussignaal en het cosinussignaal blijft constant. Aan de hand van de hoogte van deze wisselspanning weet de ECU waar de rotor zich in stilstand bevindt.

In de volgende twee afbeeldingen is de tijd per divisie verlaagd. De frequentie van het referentiesignaal op de resolver is onveranderd, maar in de meting over een groter tijdbestek gemeten. Daardoor zien we de amplitudes van de sinus- en cosinussignalen duidelijk veranderen. De eerste afbeelding is bij een laag rotortoerental gemeten en de tweede met een verhoogd toerental. Bij een toenemend toerental wordt de frequentie van de sinus- en de cosinussignalen hoger (meer signalen per tijdseenheid) maar blijft de amplitude (de hoogte van de wisselspanning) constant.


Componenten van de resolver:
In de resolver van de VW E-Golf zitten 30 in serie geschakelde spoelen. Iedere spoel in de resolver bestaat uit een weekijzeren kern met drie verschillende wikkelingen: primair, secundair 1 en secundair 2.
De primaire spoel (blauw) wordt voorzien van een hoogfrequente wisselspanning.
Het aantal secundaire windingen (1 rood, 2 groen) is op iedere spoel verschillend.
Wanneer de nok van de excentrische plaat langs de spoel beweegt, wordt de inductie in de secundaire windingen versterkt. Vanwege het aantal windingen van de secundaire wikkelingen 1 en 2 in elke spoel, resulteert dit ook in de verschillende spanningen in de secundaire wikkelingen. De ECU in de inverter kan de positie van de rotor berekenen op basis van de spanningen van de secundaire wikkelingen 1 en 2.

De afstelling van de resolver op de rotor luistert zeer nauwkeurig: veel fabrikanten schrijven voor dat men bij problemen met de resolver de complete elektromotor moet vervangen. Na het (per ongeluk) demonteren van de resolver, of het losdraaien van de bouten aan de buitenkant van de elektromotorbehuizing, kan de resolver niet meer op de correcte wijze worden terug gemonteerd. Ook in dat geval schrijven veel fabrikanten voor om de elektromotor te vervangen.
De exacte rotorpositie van een synchrone motor moet in stilstand en tijdens het rijden bekend zijn. Wanneer de sensor defect is, kan het voertuig niet meer rijden.
Van de asynchrone motor is daarentegen er geen bewaking van de rotorstand nodig. Per rotoromwenteling geeft de rotorpositiesensor vier pulsen. Met deze meting wordt de maximale hoeveelheid slip tussen het draaiende magnetische veld tussen de stator en de rotor bewaakt. Als sensor wordt vaak de Hall-sensor toegepast. De Hall-sensor geeft pulsen door aan de ECU bij het verdraaien van de rotor, maar kan geen meting in stilstand uitvoeren in tegenstelling tot de resolver van de synchrone motor. Ook kiezen fabrikanten er soms voor om de resolver van de synchrone motor te gebruiken als rotorpositiesensor.

Gerelateerde pagina’s: