Verbrandingsmotor
Elektrische aandrijving
Carrosserie
Comfort, veiligheid, HVAC
Elektronica
Onderstel
Transmissie
Diagnosetechniek
Overig
Zoek
Verbrandingsmotor
Elektrische aandrijving
Carrosserie
Comfort, veiligheid, HVAC
Elektronica
Onderstel
Transmissie
Diagnosetechniek
Overig
Zoek
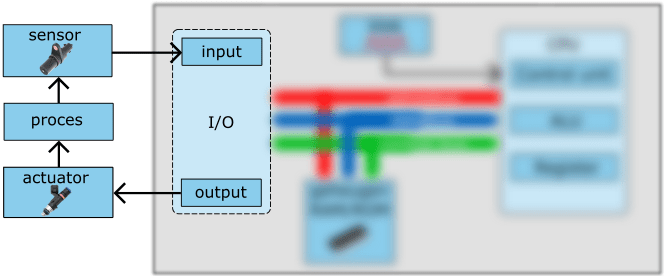
Interfaceschakelingen