Inleiding:
Automotive ethernet, BroadR-Reach en DoIP zijn sinds een aantal jaren in opkomst binnen de moderne voertuigcommunicatie. Automotive ethernet levert de fysieke en datalink-infrastructuur voor IP-gebaseerde communicatie met hoge datasnelheden. BroadR-Reach vormde de basis van de huidige point-to-point ethernetcommunicatie. DoIP is een diagnose- en programmeertransport dat diagnostische communicatie via IP mogelijk maakt over automotive ethernet.
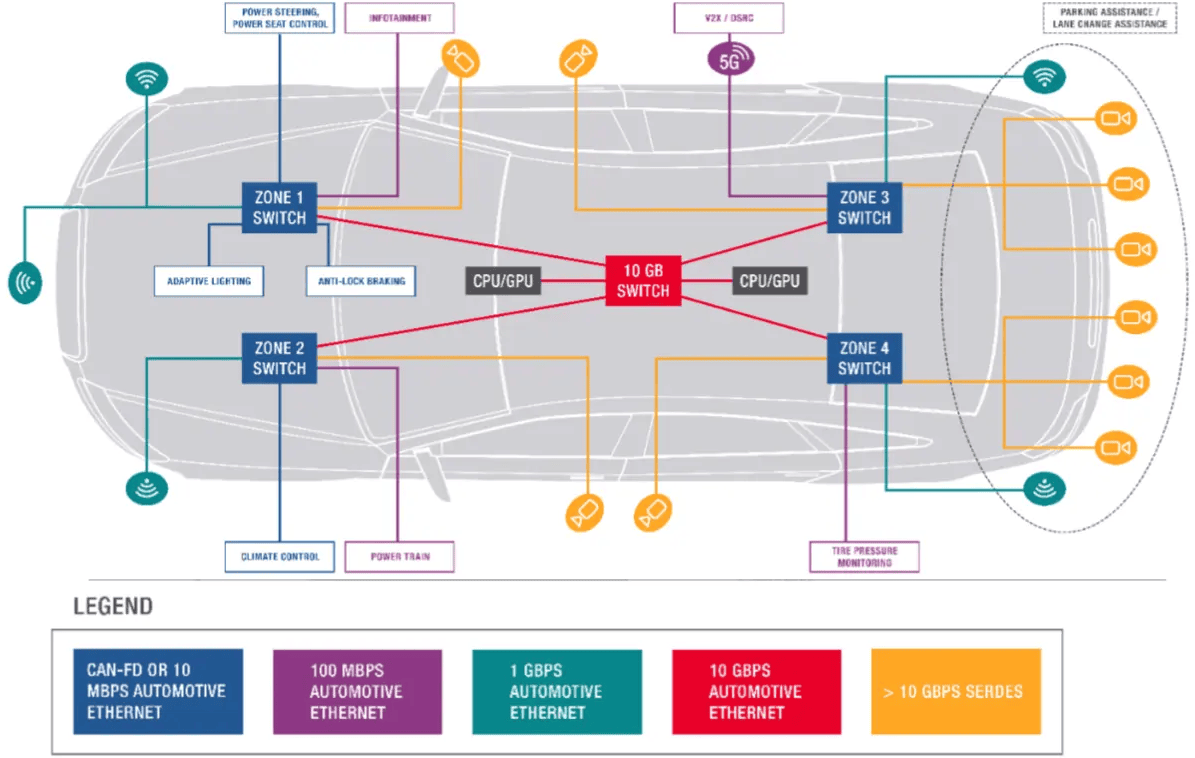
In de eerste voertuigen waarin ethernet werd toegepast, werd deze voornamelijk ingezet voor diagnose en infotainment, waar hogere datasnelheden vereist waren dan mogelijk met de toen gangbare CAN-bussystemen. Door de voortdurende toename van het aantal ECU’s, sensoren en softwarefuncties, en door sterk groeiende datavolumes afkomstig van camera’s, radar, centrale rekenmodules, infotainment en connectiviteit, is de rol van ethernet verder uitgebreid.
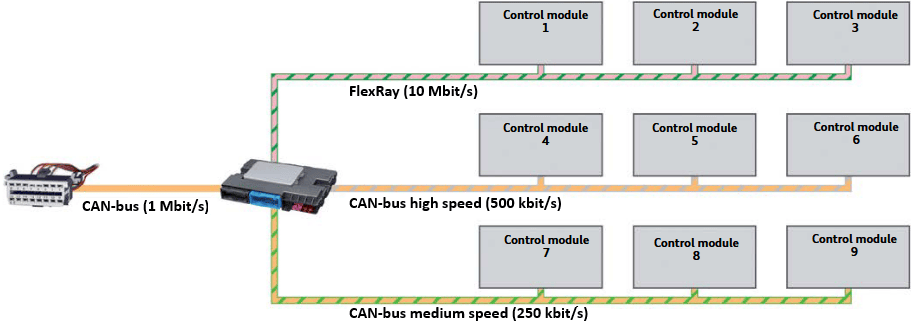
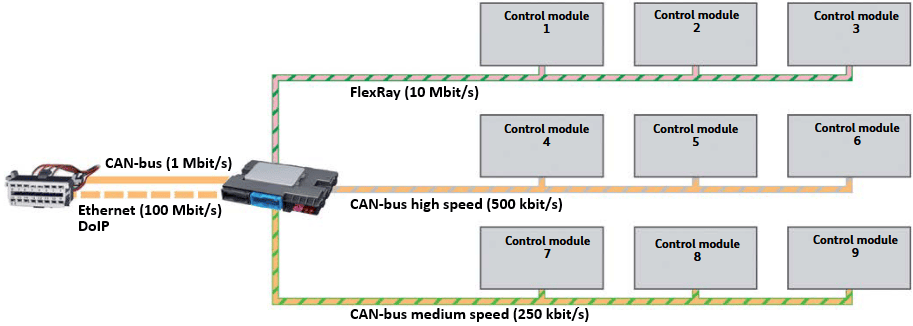
Netwerken zoals CAN- en LIN-bus worden al geruime tijd toegepast in voertuigen en blijven een geschikt communicatiemiddel zoalang de hoeveelheid informatie die wordt verstuurd beperkte blijft. Voor datarijke functies schieten deze netwerken echter tekort in beschikbare bandbreedte. Daarom wordt automotive ethernet in moderne voertuigcommunicatie steeds vaker gebruikt. Naast ethernet vinden we in die zelfde voertuigen ook nog steeds netwerken als CAN- LIN-bus en Flexray.
Automotive ethernet topologie:
Automotive ethernet is volgens hetzelfde protocol als ethernet zoals we dat vanuit thuis kennen, dat is aangepast voor de voertuigen. De meest gebruikte fysieke lagen voor automotive ethernet zijn: 10, 100 en 1000 Mbit/s (Megabit per seconde). 1000 Mbit/s is gelijk aan 1 Gbit/s (Gigabit per seconde). Dit wordt in schema’s aangeduidt als 10BASE, 100BASE en 1000BASE. Het woord “BASE” betekent baseband-signalisatie (baseband-overdracht); de volledige kabel wordt gebruikt voor één Ethernet-dataverbinding. In deze paragraaf wordt de topologie uitgelegd en in de volgende paragrafen de specifieke eigenschappen per snelheid.
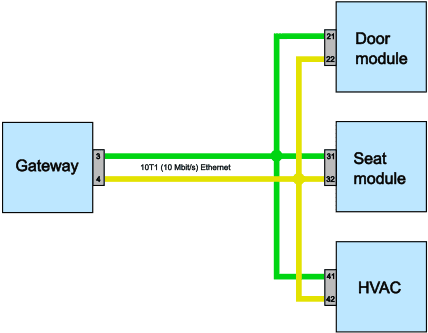
De topologie van de 10BASE-T1S, welke een bandbreedte heeft van 10 Megabit per seconde. ECU’s in voertuigen die vaak op 10BASE-T1S zijn aangesloten, zijn ECU’s met lage tot middelmatige databehoefte, die dicht bij sensoren en actuatoren zitten en geen continue hoge datastroom nodig hebben, zoals van de portierelektronica, stoelmodule of de klimaatregeling.
Meerdere ECU’s zijn parallel op de één twisted pair bedrading aangesloten, vergelijkbaar met de topologie van CAN-bus en CAN-FD. De lengte van de bus en de maximale aftakkingen (stubs) zijn begrensd om reflecties en signaalvervorming te voorkomen. Daarom gelden specifieke richtlijnen voor kabellengte, aftaklengte en terminatie, vergelijkbaar met die bij andere bussystemen.
Omdat alle ECU’s hetzelfde medium delen, kan slechts één ECU tegelijk zenden. De toegang tot de bus wordt niet geregeld door arbitrage zoals bij CAN, maar door Physical Layer Collision Avoidance. Hierbij krijgt elke ECU een vast tijdslot toegewezen waarin deze mag zenden. Hierdoor ontstaat een voorspelbare en botsingsvrije communicatie op de gedeelde bus, ondanks het gebruik van ethernetframes.
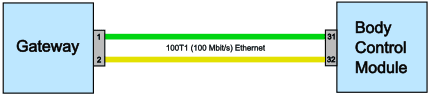
De topologie van de 100BASE en de 1000BASE hebben als eigenschap dat maximaal twee ECU’s communiceren met elkaar via twisted pair ethernetdraden. Dit betekent: er bevindt zich één ECU aan de ene kant, en één ECU aan de andere kant van een draadpaar. Er zijn geen knooppunten aangebracht die andere ECU’s met dit netwerk verbindt, zoals we dat bij 10BASE ethernet en CAN-bus zien. In de literatuur zien we vaak “module to module communication” of “ECU to ECU communication”. Dit duidt op de topologie die in deze paragraaf is beschreven.
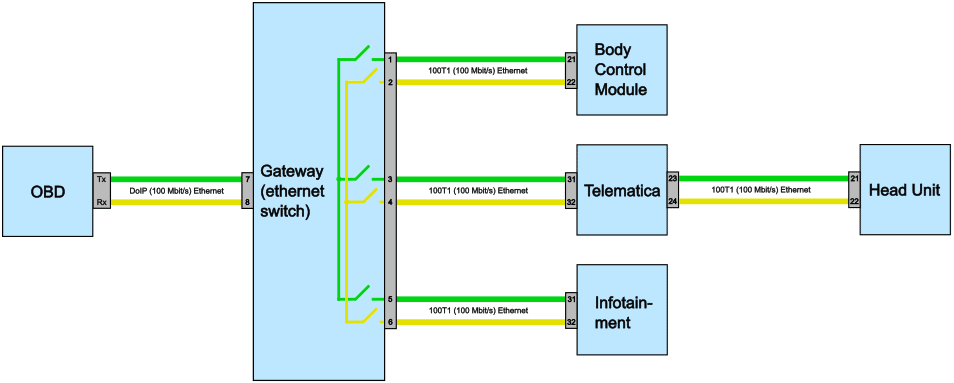
De ECU’s van de 100BASE en 1000BASE die dus niet direct met ethernet met elkaar zijn verbonden, kunnen via een ethernetswitch wel met elkaar communiceren. De switch kan twee (sub)netwerken met elkaar verbinden zodra daar communicatie is gewenst. Voorbeeld: in de onderstaande afbeelding kan de “Body Control Module” via de ethernetswitch in de gateway communiceren met de Infotainment module”.
Switches zijn vaak geïntegreerd in gateways of centrale rekenmodules. De fysieke switches zijn in werkelijkheid MOSFETs welke door de elektronica kunnen worden in- en uitgeschakeld.
10BASE-T1S (10 Mbit/s)
Deze variant wordt gebruikt voor ethernetcommunicatie met sensoren en actuatoren en wordt toegepast als alternatief of aanvulling op CAN- en CAN FD-netwerken. De techniek is ontwikkeld voor gebruik in het lagere snelheidsdomein van voertuigen en maakt gebruik van een multidrop-busstructuur, waarbij meerdere ECU’s, sensoren en actuatoren zijn aangesloten op één gedeeld getwist aderpaar. Hierdoor is geen klassieke ethernet-switch per node nodig en kan de kabelboom eenvoudiger en lichter worden uitgevoerd.
Omdat meerdere deelnemers hetzelfde transmissiemedium delen, werkt 10BASE-T1S half-duplex. Dit betekent dat zenden en ontvangen niet gelijktijdig plaatsvinden, maar elkaar afwisselen. Om botsingen op de bus te voorkomen, wordt gebruikgemaakt van Physical Layer Collision Avoidance. Elke ECU krijgt een vast tijdslot toegewezen waarin hij mag zenden. Alleen de ECU met het actieve tijdslot mag data op de bus plaatsen. Andere ECU’s luisteren. Hierdoor ontstaan geen botsingen en hoeft er geen bericht te worden afgebroken of opnieuw verzonden. Dit verschilt met CAN-bus, waarbij de voorrang van de berichten met behulp van de arbitrage wordt bepaald.
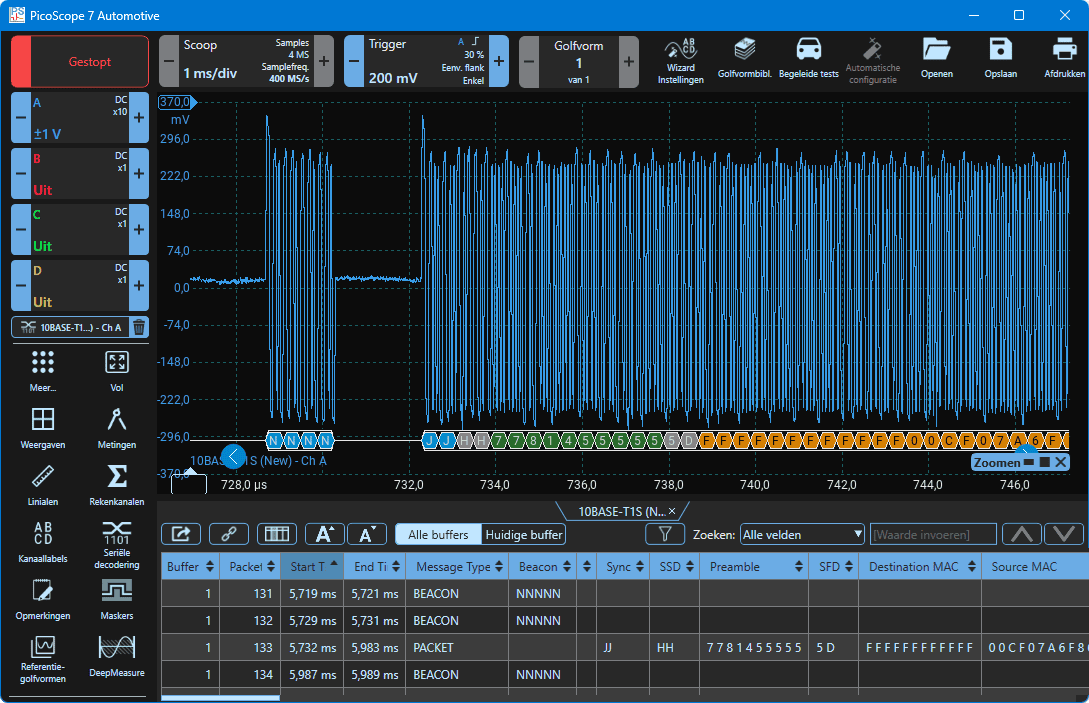
Het onderstaande scoopbeeld toont het signaalverloop van 10BASE Ethernet welke door middel van een differentiaalmeting op met meetkanaal op beide ethernetdraden is uitgevoerd. Met de Pico Automotive software kan het signaal worden gedecodeerd. Kenmerkend voor het 10BASE signaalverloop:
- De datasnelheid is ongeveer 10 Mbit/s met een bitduur van ongeveer 100 ns per bit;
- In rust (idle) bedraagt de signaalspanning ongeveer 0 volt;
- De amplitude van het signaal bedraagt ongeveer 300 mV positief en 300 mV negatief (600 mV verschil);
- Beacon-frames: dit wordt gebruikt voor de synchronisatie, zoals het “sync-field” bij LIN-bus dat ook doet. Dit is het eerste blok waar in de decodering “N N N N” onder staat.
- Packet-frames: dit is het bericht dat wordt verzonden. Dit is de reeks die in de codering vanaf J tot F wordt benoemd. Na de F staan er nog een aantal keren F genoemd waarna de data en de afsluiting van het bericht volgt.
Onder het scoopbeeld wordt er ingezoomd in het deel van J tot F. In de daaronder volgende screenshots wordt verder ingezoomd in dit deel van het signaal, waarin ook duidelijk wordt waar J en F voor staan.
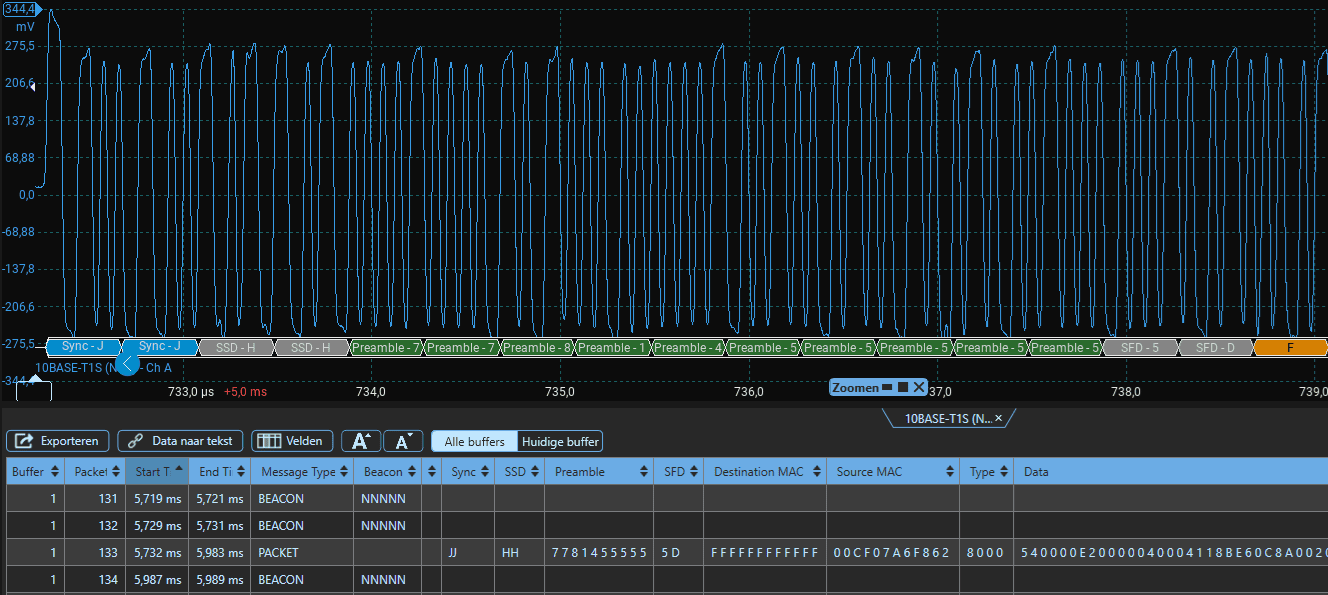
Het onderstaande scoopbeeld is een ingezoomd gedeelte van het bovenstaande beeld (van J tot F). Door het inzoomen is het begin van de package gedeeltelijk zichtbaar. In de decodering zien we de volgende onderdelen:
- Preamble (7781455555): dit is de synchronisatie tussen zender en ontvanger;
- SFD (Start Frame Delimiter, 5D): dit is het begin van de frame;
- Destination MAC (FFFFFFFFFFFF): broadcast -> iedere node mag dit frame ontvangen.
De eerste F van de Destination Mac is aan de rechterkant van de screenshot te zien. De volgende screenshot weergeeft de data vanaf de laatste F van de Destination Mac.
Na de laatste F van de destination MAC gaat het bericht verder. Dit is in de onderstaande screenshot te zien:
- Source MAC (00CF07A6F862): hier staat de identifier van de ECU die het bericht verstuurt;
- Type (EthernetType, 8000): IPv4 (typisch bij DoIP);
- Data: beginnend met 540000E20000040004118BE60C8A0020.
De data is dermate lang, dat deze onmogelijk op een screenshot past.
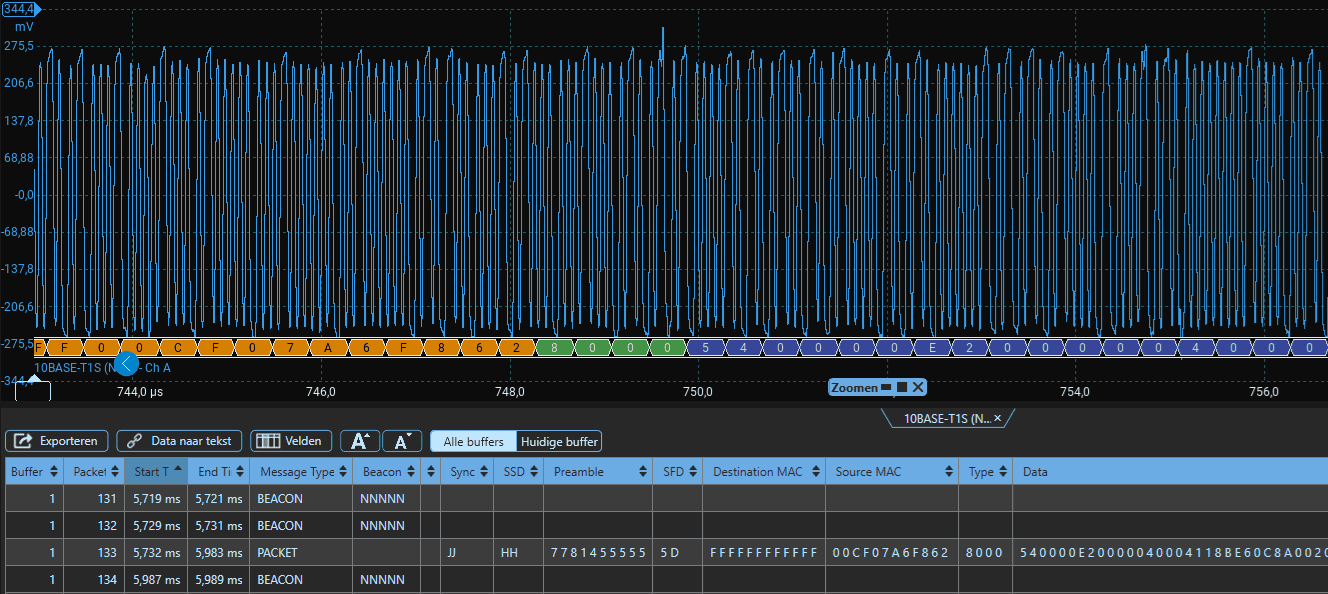
De bovenstaande screenshots met uitleg gingen voer het eerste deel van het Ethernetsignaal. Hieronder is het complete signaal te zien. In de decodering is links nog net het oranje en groene gedeelte te zien met de Preamble, Destination en Source MAC. Daarna begint het blauw/paarse deel van de decodering: hier begint de data. In de bovenstaande screenshot begint de data met 540000E2000004000. De complete datahoeveelheid is naar schatting tweehonderd keer zo groot.
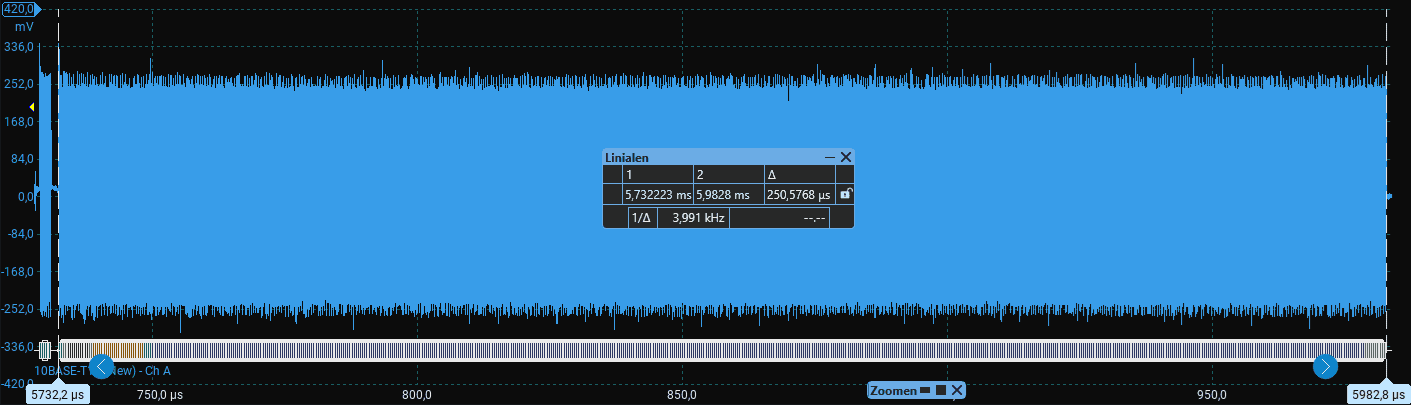
De screenshot hieronder weergeeft het einde van het bericht, vanaf het laatste datablok tot het ESD (End of Stream Delimiter) met daartussen de FCS (Frame Check Sequence) welke net als bij de CRC (cyclic redundancy check van CAN-bus) als controle een berekening meestuurt.
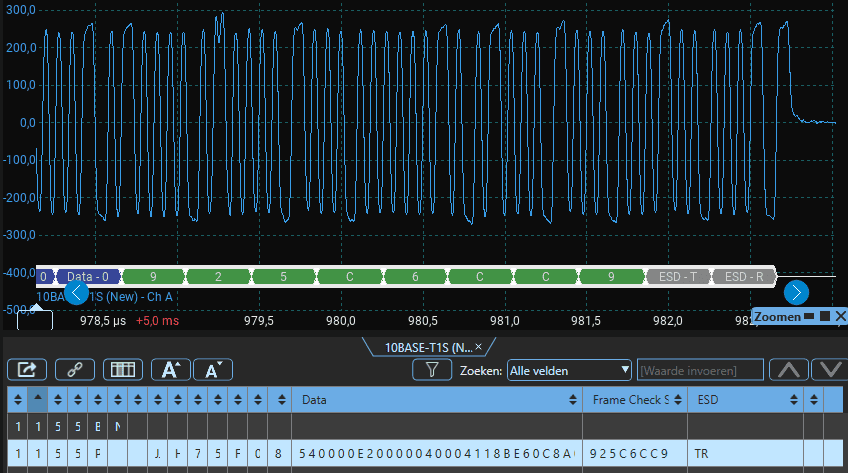
Tot slot over het 10BASE Ethernet signaalverloop: het complete bericht tussen de linialen in de onderstaande screenshot duurt ongeveer 250 microseconden (0,00025 seconden). Daarin is de eerste 5% van het bericht in de drie eerdere screenshots uitgelegd en volgt er enorm veel data die in een zeer korte tijd is verstuurd. Dit is dan ook een belangrijke eigenschap voor Ethernet: veel berichten in een korte tijd door een grote bandbreedte. Hoewel hiermee zichtbaar is gemaakt dat er ontzettend veel data in een korte tijd kan worden verstuurd, is de 10BASE de langzaamste Ethernet die we kunnen tegenkomen in auto’s, maar wel degene die we met een PicoScope Automotive oscilloscoop goed kunnen meten en decoderen. De Automotive scoop heeft helaas een te lage samplefrequentie om de snellere systemen goed te kunnen meten.
100BASE-T1 (100 Mbit/s)
100BASE-T1 heeft een snelheid van 100 Megabit per seconde en maakt gebruik van point-to-point communicatie over een onafgeschermd getwist aderpaar. De verbinding bestaat altijd uit precies twee ECU’s die exclusief met elkaar communiceren. Hierdoor hoeft geen rekening te worden gehouden met andere ECU’s die hetzelfde transmissiemedium delen. De verbinding is full-duplex, wat betekent dat communicatie gelijktijdig in beide richtingen kan plaatsvinden. Er bestaat bij de 100BASE geen recessieve toestand waarbij er geen data wordt verzonden: de link blijft continu actief.
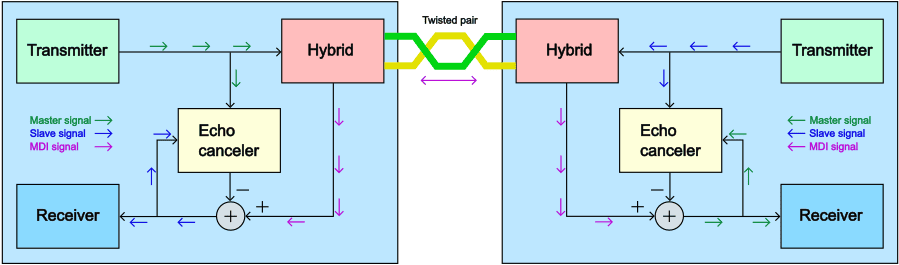
In de onderstaande afbeelding is te zien hoe full-duplex communicatie over één getwiste draadpaar technisch mogelijk wordt gemaakt. Beide ECU’s zenden en ontvangen gelijktijdig via dezelfde Ethernetbedrading. Het zendsignaal van de transmitter wordt via de hybrid op het twisted pair gezet, maar een deel van datzelfde signaal lekt direct terug naar de eigen ontvangketen. Dit teruggelekte signaal wordt aangeduid als de echo. Tegelijkertijd komt via hetzelfde aderpaar het zendsignaal van de andere ECU binnen. De signalen op de ethernetdraden bevat dus altijd een combinatie van het eigen zendsignaal, de echo daarvan en het ontvangsignaal van de andere zijde.
De receiver meet dit gecombineerde MDI-signaal en kan dit zonder aanvullende verwerking niet direct onderscheiden. Daarom bevat de PHY een echo canceller. Deze echo canceller heeft het eigen zendsignaal ontvangen vanuit de transmitter en berekent het echosignaal, dat vervolgens van het gemeten MDI-signaal wordt afgetrokken. Wat overblijft, is het verzonden signaal van de andere ECU, dat daarna betrouwbaar kan worden gedecodeerd.
Doordat dit proces continu plaatsvindt, kunnen beide ECU’s permanent zenden en ontvangen zonder wachttijden of tijdsloten.
Deze eigenschappen maken 100BASE-T1 geschikt voor toepassingen met snelle, continue datastromen, zoals cameradata, infotainment en communicatie tussen gateways en centrale rekenmodules. Het verschil met 10BASE is dat bij die variant zenden en ontvangen elkaar afwisselen op een gedeeld medium, terwijl bij 100BASE beide richtingen gelijktijdig actief zijn via een point-to-point verbinding.
100BASE wordt toegepast bij systemen zoals camera’s, telematica-modules, gateways en infotainmentkoppelingen, waar IP-communicatie en een hogere bandbreedte nodig zijn, maar waarbij de zeer hoge datasnelheid van 1000BASE (1 Gbit/s) nog niet noodzakelijk is.
Hieronder is een meting afgebeeld van het signaalverloop van 100BASE ethernet. Net als bij CAN-bus verloopt het signaal van kanaal A en B in tegenovergestelde richting: als de spanning van kanaal A hoog wordt, zien we dat de spanning van kanaal B laag wordt, en andersom. De ECU’s bepalen het spanningsverschil tussen de twee signalen.
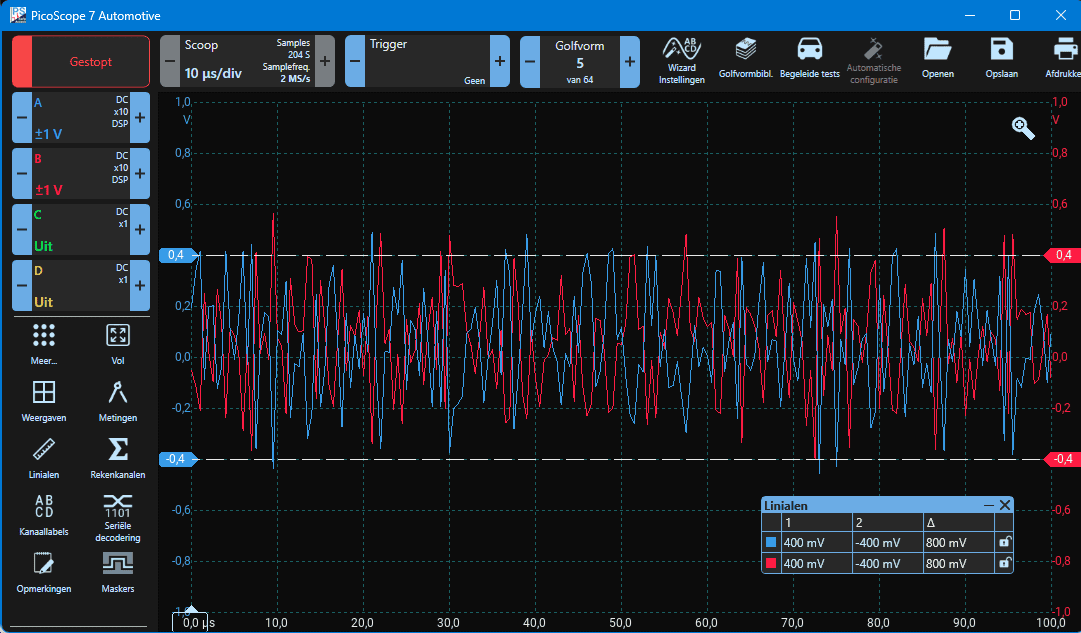
Het signaalverloop van de 100BASE is niet zuiver. Er zijn geen duidelijke datablokken zichtbaar zoals we bij de 10BASE wel kunnen meten en het serieel decoderen is niet mogelijk. Dit komt doordat de verversingssnelheid van de Automotive oscilloscoop te laag is. Om een zuiver signaalverloop en de decodeerfunctie te kunnen gebruiken, dient een oscilloscoop uit een hogere prijsklasse te worden gebruikt (vanaf ca. €5000,-).
1000BASE-T1 (1000 Mbit/s = 1 Gbit/s)
1000BASE-T1 maakt, net als 100BASE-T1, gebruik van een onafgeschermd getwist aderpaar met differentiële signaaloverdracht. De verbinding is ook point-to-point en full-duplex, waardoor gelijktijdig verzenden en ontvangen mogelijk is tussen twee ECU’s waarbij de echo wordt gefilterd.. Deze variant wordt toegepast bij systemen waar 100BASE-T1 onvoldoende bandbreedte biedt, zoals hoge-resolutie camera’s voor ADAS, radar- en lidar-systemen, centrale rekenmodules, videostreams en samengevoegde sensordata.
Door de hogere datasnelheid en bijbehorende signaalfrequenties stelt 1000BASE-T1 strengere eisen aan bedrading, connectoren en montage dan 100BASE-T1. Afwijkingen in twisting, verhoogde contact resistance of onjuiste reparaties hebben sneller invloed op de signaalkwaliteit en kunnen leiden tot instabiele communicatie. Daarom hanteren fabrikanten voor 1000BASE-T1 vaak striktere specificaties voor kabelboomontwerp, routing en reparatie.
BroadR-Reach:
BroadR-Reach is ontwikkeld door Broadcom als automotive ethernet physical layer voor 100 Mbit/s full-duplex communicatie over één onafgeschermd getwist aderpaar. Later werd deze technologie ook aangeduid als OPEN Alliance BroadR-Reach (OABR). BroadR-Reach was oorspronkelijk eigendom van Broadcom en geen open standaard. Hierdoor was de toepassing in eerste instantie vooral gekoppeld aan Broadcom-hardware. Uiteindelijk heeft BroadR-Reach als technische basis gediend voor de open standaard 100BASE-T1, vastgelegd in IEEE 802.3bw-2015.
BroadR-Reach vormt daarmee de oorsprong van de 100BASE-T1-verbinding en wordt tegenwoordig niet meer als afzonderlijke technologie toegepast. De benaming BroadR-Reach komt nog wel voor in documentatie en voertuigbeschrijvingen van oudere voertuigen, waarin ethernetverbindingen zijn toegepast die technisch overeenkomen met de huidige 100BASE-T1-standaard.
DoIP (Diagnostics over Internet Protocol):
DoIP (uitgesproken als “doo-ip”, waarbij IP wordt uitgesproken zoals bij internetprotocol), staat voor Diagnostics over Internet Protocol. DoIP is een diagnose- en programmeerprotocol dat gebruikmaakt van IP-communicatie over automotive ethernet. Bij DoIP worden diagnosegegevens via Ethernet verzonden. Hierdoor is de gegevensoverdracht veel sneller dan bij CAN-bus. Als een auto met DoIP in de OBD, komen er bij veel uitleescomputers vragen of dat je wenst om met CAN of met DoIP uit te lezen.
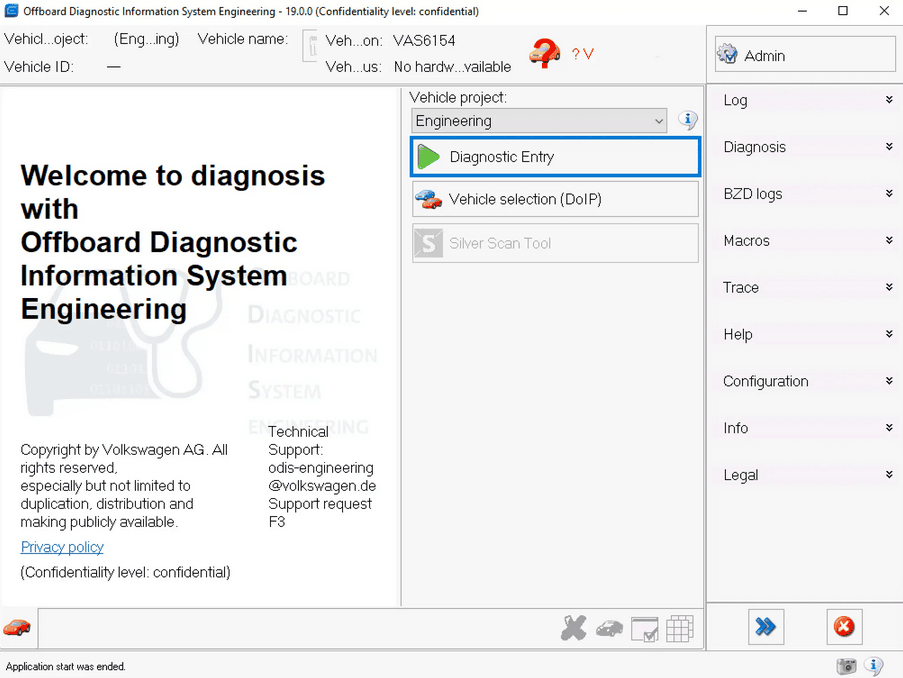
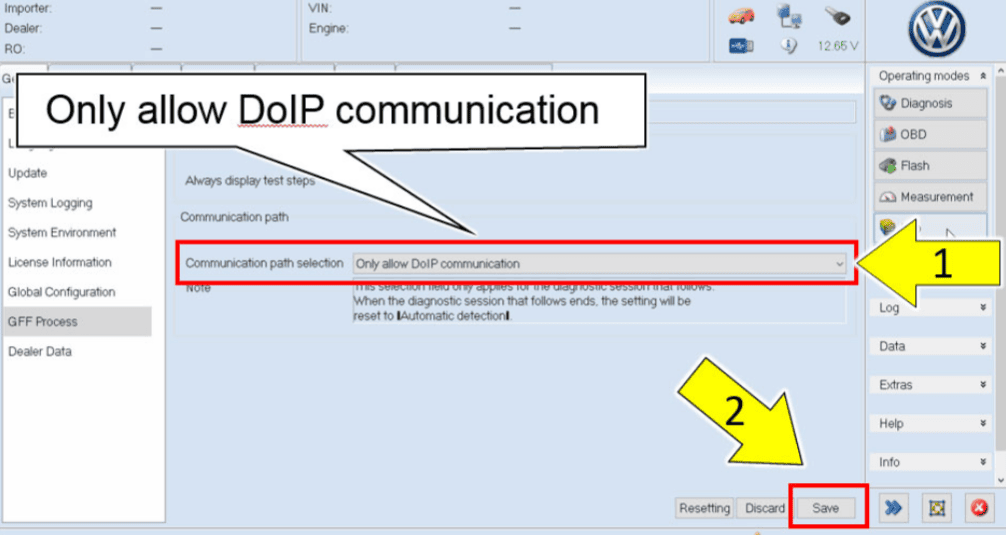
De belangrijkste functionele reden voor de toepassing van DoIP is de aanzienlijk hogere datarate en daarmee ook de communicatiesnelheid ten opzichte van diagnose via CAN. Dit is vooral relevant bij het programmeren en flashen van ECU’s en bij het verwerken van grotere datasets. In de praktijk merken we dit aan kortere programmeertijden en snellere laadtijden tijdens het uitlezen van voertuigen met veel software en een groot aantal ECU’s. Bij het programmeren van ECU’s dient er soms handmatig te worden overgeschakeld van CAN naar DoIP. In de onderstaande afbeeldingen staan screenshots van ODIS (VAG) waarin een keuzemogelijkheid voor DoIP staat voordat er wordt uitgelezen, en de handmatige instelling om te flashen via DoIP.
In moderne voertuigen verloopt DoIP-communicatie meestal via een centrale gateway. De diagnosetool communiceert via een ethernetverbinding met deze gateway, die het dataverkeer via interne switchfunctionaliteit doorstuurt naar de juiste ECU’s. DoIP is niet altijd direct actief. Vaak is een wake-up of activatieconditie nodig voordat communicatie tot stand komt. Voor diagnose is dit een belangrijk aandachtspunt: het ontbreken van DoIP-communicatie hoeft niet te wijzen op een fysieke storing, maar kan ook betekenen dat de activatie- of sessievoorwaarden ontbreken.
Wake-up lijn voor DoIP:
De wake-up lijn is nodig om ECU’s en het ethernetnetwerk uit een slaaptoestand te halen voordat IP- en DoIP-communicatie mogelijk is. Zonder wake-up is de ethernetverbinding vaak niet actief. Moderne voertuigen schakelen ECU’s en netwerken uit om energie te besparen. Dit wordt de “sleep modus” genoemd. Automotive ethernet-ECU’s, switches en gateways zijn in deze toestand niet actief op IP-niveau, vaak ook niet op PHY-niveau, en daardoor tijdens de sleepmodus niet zichtbaar voor DoIP of diagnose. Daarom is een apart wake-up mechanisme noodzakelijk.
De wake-up lijn is een eenvoudig elektrisch signaal, meestal een 12 volt- of 5 volt-signaal afhankelijk van het voertuigontwerp, waarmee een ECU of gateway een commando krijgt om te ontwaken. Zodra de wake-up actief wordt, verlaat de ECU de slaapstand, wordt de ethernet PHY ingeschakeld en wordt IP-communicatie actief. Pas daarna kan de DoIP-communicatie plaatsvinden. Zonder deze activatie blijft de ECU stil, ook wanneer de ethernetkabel correct is aangesloten.
In de praktijk kan de wake-up worden geactiveerd door het contactslot, het openen van een portier, het aansluiten van een diagnosetool, een aparte wake-up pin in de OBD-connector of een CAN-bericht dat een gateway activeert. Bij DoIP via de OBD-connector wordt vaak een specifieke pin gebruikt om de centrale gateway of DoIP-ECU te wekken.
DoIP vereist altijd een actieve IP-verbinding. Daarom geldt in de praktijk: geen wake-up betekent geen ethernet link, geen ethernet link betekent geen IP-communicatie en zonder IP is DoIP niet mogelijk. Dit is een aandachtspunt tijdens de storingsdiagnose.
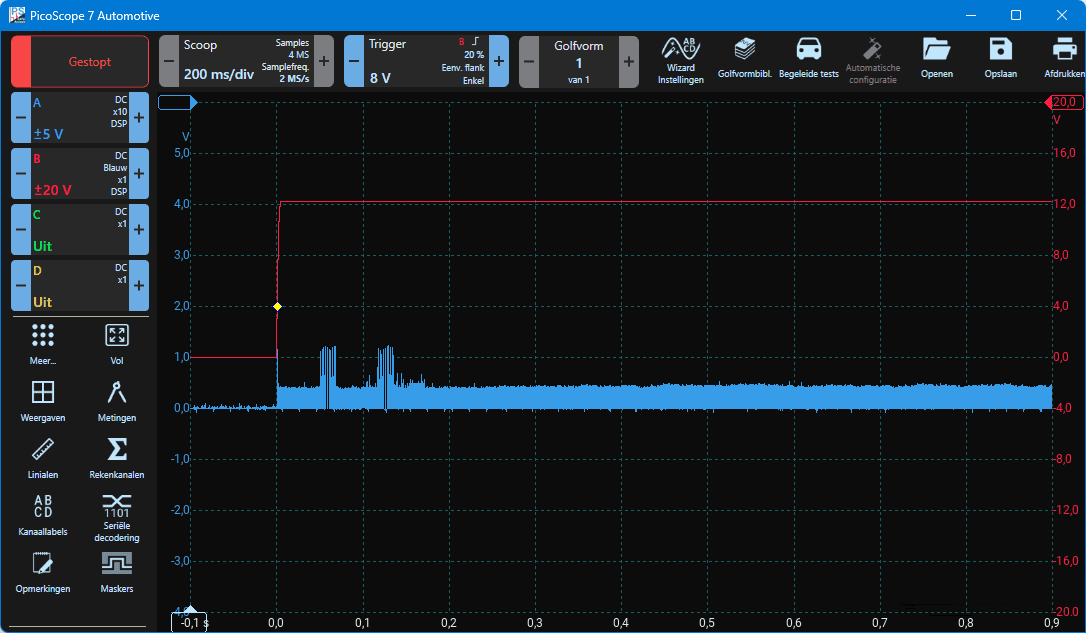
In het onderstaande scoopbeeld is de wake-up-lijn (kanaal B) te zien die bij t = 0 sec. van 0 naar ongeveer 12 volt stijgt. Op het moment dat de wake-up-lijn wordt geactiveerd, begint de communicatie op de ethernetlijn. Het resultaat hiervan is te zien op meetkanaal A.
Power over Data Lines (PoDL)
Bij automotive ethernet wordt naast datacommunicatie ook steeds vaker voeding over dezelfde verbinding gestuurd. Dit principe wordt aangeduid als Power over Data Lines. Hierbij worden voedingsspanning en datasignalen gecombineerd over één single twisted pair, waardoor extra voedingsdraden overbodig worden.
Deze techniek is vergelijkbaar met POE (Power Over Ethernet) vanuit het huisnetwerk waarbij accesspoints naast een UTP-kabel geen aparte voedingsdraad nodig hebben.
PoDL is vooral relevant bij sensoren en randapparatuur zoals camera’s, radar- en lidar-units en compacte ECU’s. Door voeding en data over één verbinding te combineren, kan de kabelboom lichter, dunner en eenvoudiger worden opgebouwd. Dit levert voordelen op in gewicht, kosten en montage.
De voeding wordt via speciale injectors aan de ethernetverbinding toegevoegd, zodat de datasignalen niet worden verstoord. Aan de ontvangende zijde wordt de voeding weer gescheiden van het datasignaal en gebruikt om de aangesloten module van energie te voorzien. De exacte spannings- en vermogensniveaus zijn vastgelegd in standaarden en verschillen per toepassing.
Bij diagnose en reparatie is PoDL een belangrijk aandachtspunt. Een storing in een ethernetverbinding kan zowel leiden tot datacommunicatieproblemen als tot het volledig uitvallen van een aangesloten ECU doordat de voeding ontbreekt. Hierdoor is het niet altijd direct duidelijk of een fout wordt veroorzaakt door een dataprobleem of een voedingsprobleem. Ook moet bij metingen rekening worden gehouden met de aanwezigheid van voedingsspanning op de datalijn.