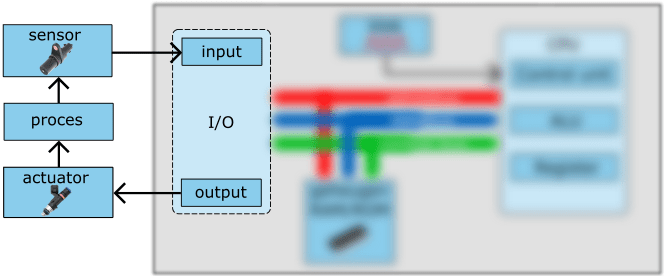
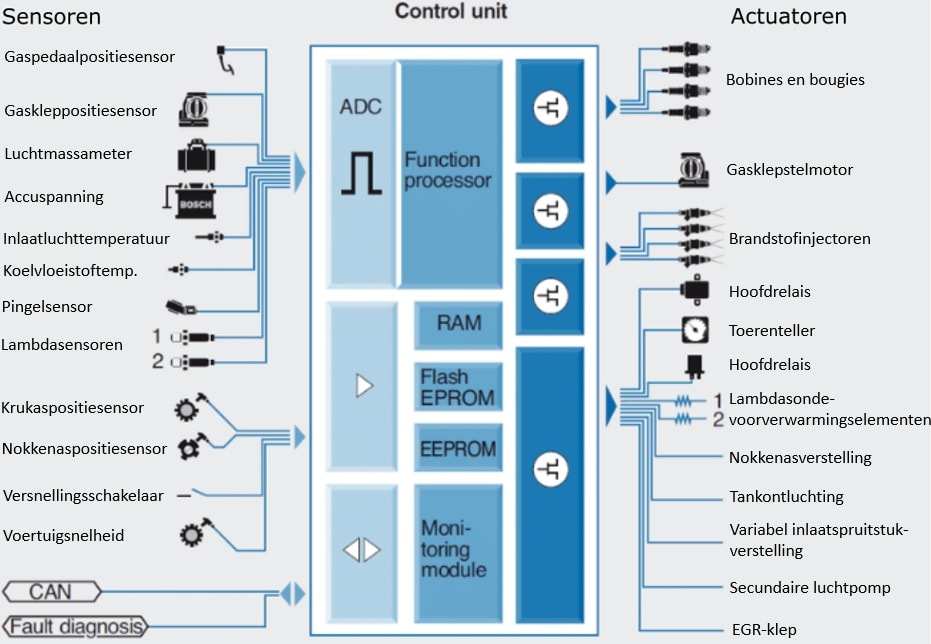
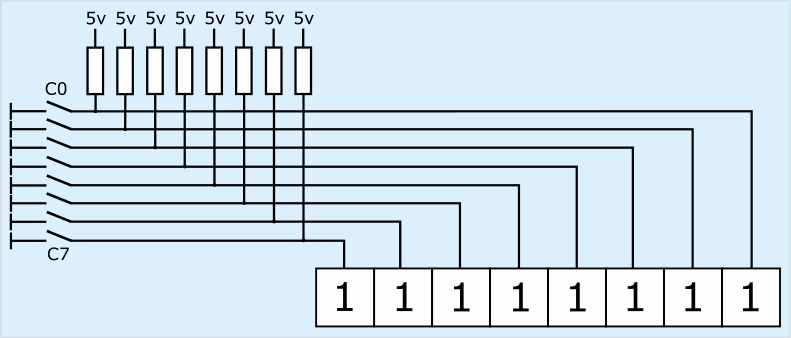
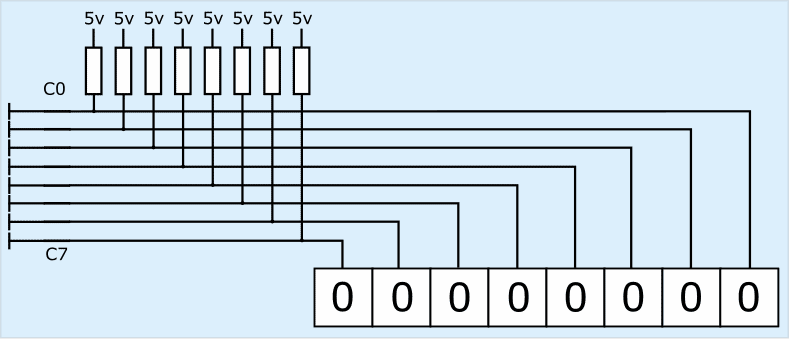
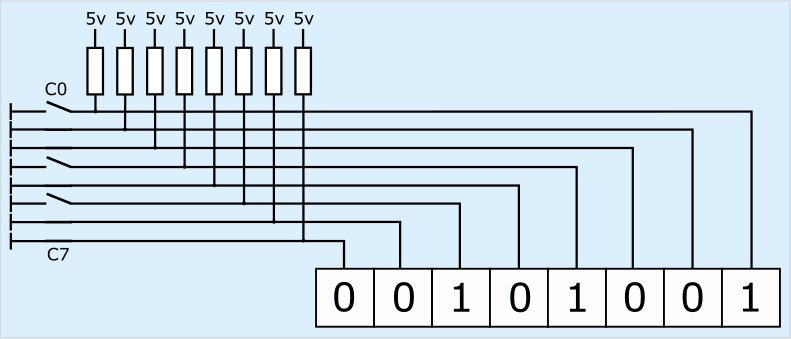
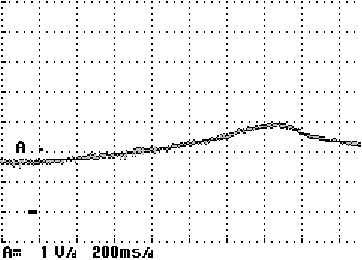
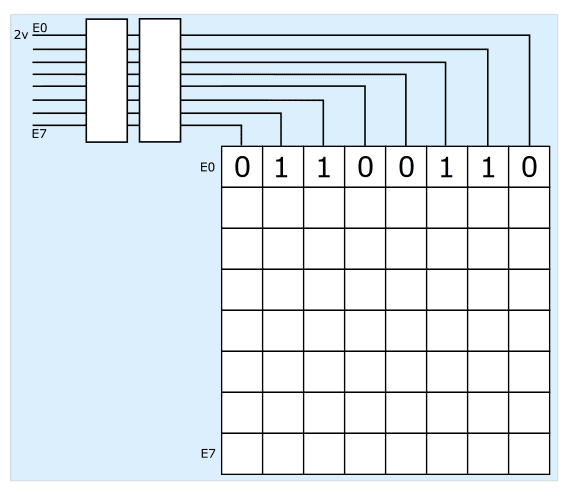
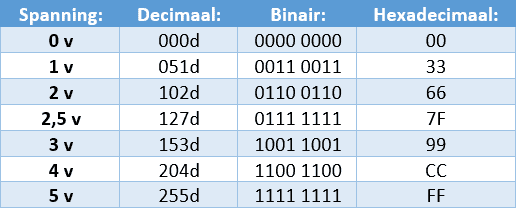
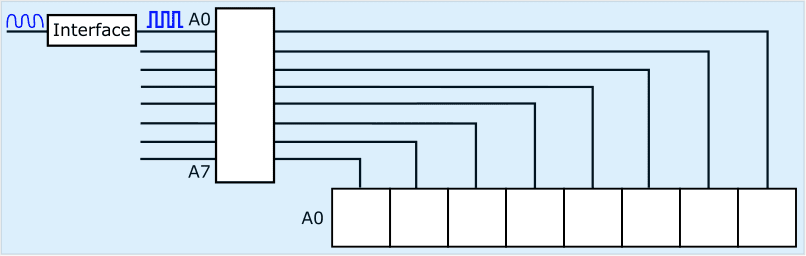
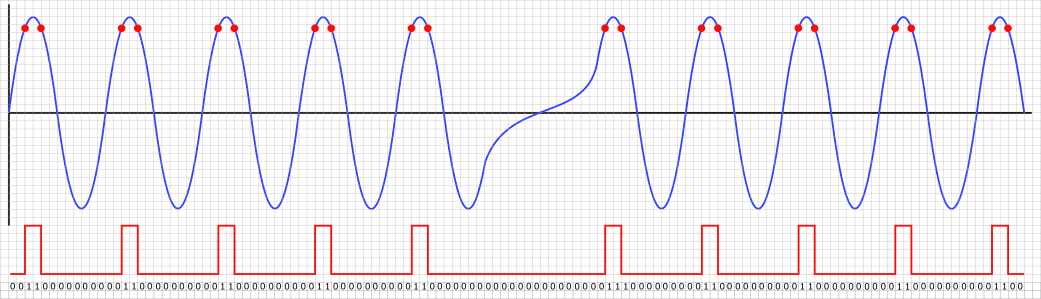
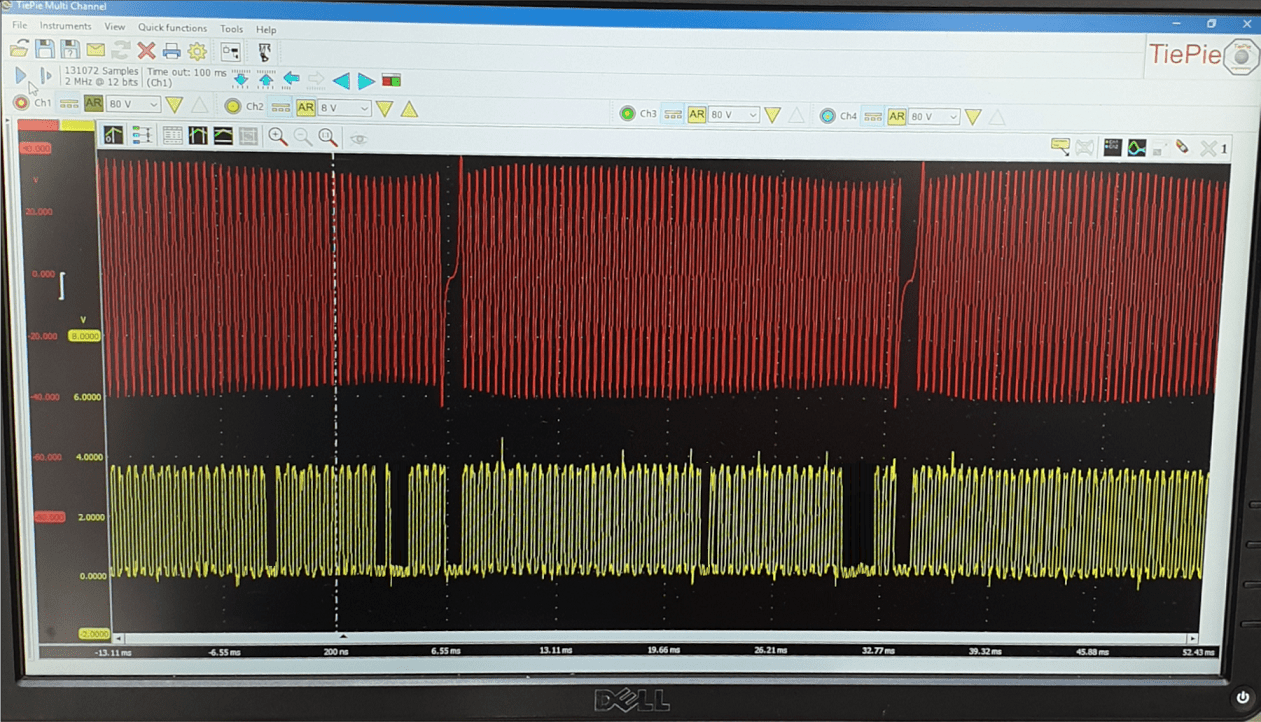
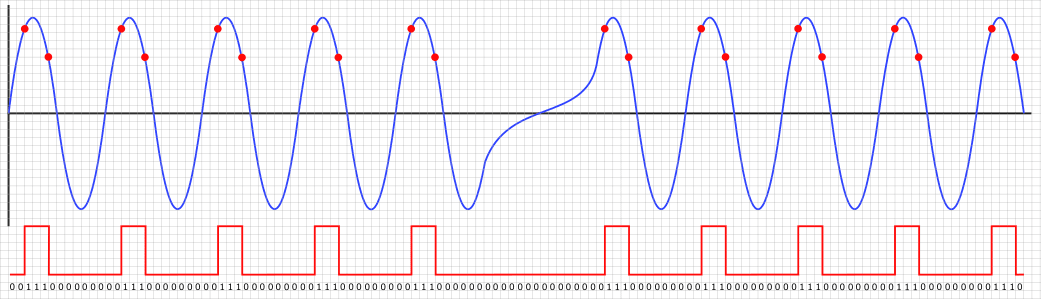
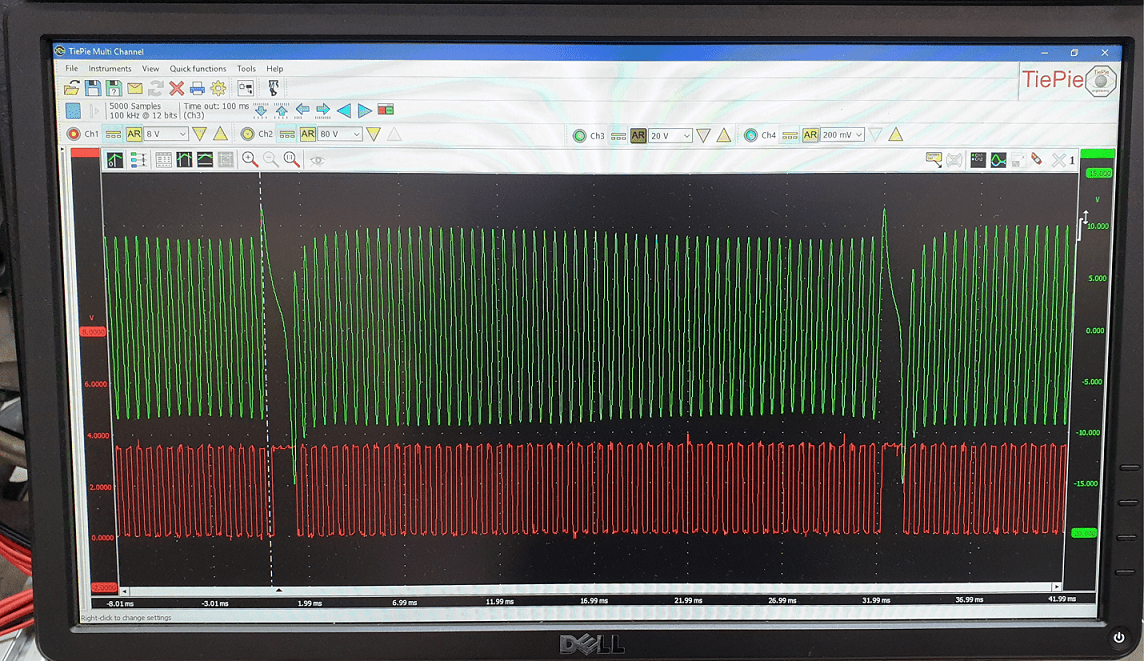
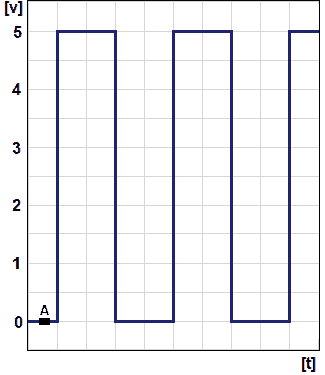
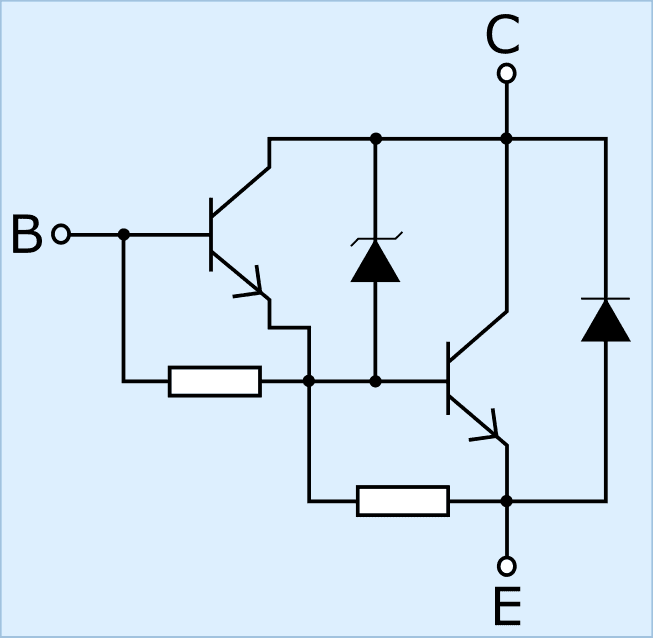
介面電路 科目:介紹電晶體 電晶體邏輯 (TTL)將類比感測器電壓轉換為數位訊息將脈衝發生器訊號轉換為數位訊息輸出訊號 介紹:在大多數情況下,來自感測器的電訊號在提交給處理器之前必須進行調整。 執行器由電腦的另一側控制。 這些通常是經常切換大電流的電感電路。 調節感測器訊號和執行器電流的硬體稱為介面電路。 介面電路確保類比電壓到數位電壓的轉換。 傳感器 傳輸低電流電壓。 介面電路將電壓轉換為數位值(0或1)。 感測器訊號電流強度低;執行器 需要更高的電流。 周圍 控制執行器,以電晶體或 FET(組合)的形式位於 ECU 中,也稱為「驅動器」。 我們將在「輸出訊號」部分更詳細地討論這一點。 下圖顯示了(汽油)引擎管理系統的傳感器和執行器。 頂部的一組感測器(從加速踏板位置感測器到 lambda 感測器)屬於「模擬」類別。 這意味著輸入的感測器電壓必須先在 ADC(類比數位轉換器)中進行數位化。 下組感知器(曲軸位置感知器到車速感知器)已經以數位方式提供訊號。 開關訊號或塊電壓直接施加到CPU。右側的執行器由輸出級控制。 輸出級也稱為驅動器,由多個電晶體組成的電路組成,用於根據來自電腦的控制脈衝產生可用的電壓和電流來控制執行器。 具有感測器(左)和執行器(右)的引擎管理系統 電晶體電晶體邏輯(TTL):處理器的工作電壓為 5 伏特。 因此,輸入和輸出電壓被限制在 0 至 5 伏特的範圍內(TTL 電平,電晶體電晶體邏輯的縮寫)。 對於偏離此電壓位準的訊號,在介面電路中進行調整。下圖顯示如何從開關位置形成 1 或 0。 透過上拉電阻,5伏特電壓提供 邏輯1 當開關打開時在處理器的輸入上。 上拉電阻兩端的電壓不接地。當開關閉合時,上拉電阻兩端會出現壓降。 處理器輸入端的 0 伏特電壓被視為 邏輯0. 所有開關開啟:處理器輸入上為 11111111 所有開關均關閉:處理器輸入為 00000000 打開和關閉開關的組合會產生一系列 8 和 00101001。 圖中,發送給處理器的XNUMX位元訊息為:XNUMX。對於 8 位元處理器,每個週期同時讀取 XNUMX 位元。 在下一個週期期間,這發生在時鐘的下一個「滴答聲」期間(參見 系統匯流排 在關於 ECU 操作的頁面上)接下來是一個包含八個新位元的序列。 開啟和關閉開關:處理器輸入上為 00101001 將類比感測器電壓轉換為數位資訊: 數位輸入訊號由處理器直接處理。 類比訊號首先在 A/D 轉換器中轉換為數位訊號。 我們以渦輪壓力感測器的類比電壓曲線為例:空閒時電壓約為 1,8 伏特;加速時,電壓升至近 3 伏特。電壓變化不能直接在處理器中處理。 首先,測量的電壓必須轉換為十進位值(0 到 255)。範圍從 0 到 5 伏,十進制值從 0 到 255(因此有 256 種可能性)。 簡單的計算表明,如果我們將 5 伏特除以 256 種可能性,則可以得到 19,5 mV(0,0195 伏特)的步長。 上面的範例顯示了渦輪壓力感測器的電壓變化與時間的關係。 溫度感知器和油門踏板位置感知器的電壓曲線是相同的,只是在不同的時間範圍內:加熱冷卻液比加速渦輪需要更長的時間。本節前面有一張圖片顯示了類比訊號的類別。 除此之外,這還顯示了溫度感測器和加速踏板位置感測器。 類比電壓在A/D轉換器中轉換成8位元資訊單元。 許多具有多個輸入引腳的處理器只有一個 A/D 轉換器。 使用多路復用將多個類比訊號組合成一個訊號。 在此範例中,我們看到一個具有八個輸入的 A/D 轉換器。 腳位 0 上有 2 伏特電壓。 腳位E1至E7可以同時提供電壓。 這些資訊透過多路復用技術被一一轉換成數位訊息。2 伏特電壓被轉換為二進位值。 透過以下公式我們可以將類比電壓轉換為十進位值,然後再轉換為二進位值:2v / 5v * 255d = 102d在這裡,我們將輸入電壓 (2v) 除以最大電壓 (5v),然後乘以最大十進位值 (255)。透過進行一些計算或執行一些巧妙的技巧,我們可以將十進制數 255d 轉換為二進位值 01100110。請參閱此頁面: 二進制、十進制、十六進制。 8位元A/D轉換器 下表顯示了與不同電壓相關的十進制、二進制和十六進制值。讀取即時資料時,可能會顯示感測器訊號的十進制、二進位或十六進位值。<0,5 伏特 (025d) 的電壓訊號被視為對地短路;如果訊號升至 4,5 伏特 (220d) 以上,計算機會將其轉換為正極短路。 十進制、二進制和十六進制值的電壓 將脈衝發生器訊號轉換為數位訊息:來自脈衝產生器(包括感應式曲軸位置感測器)的訊號實際上是脈衝輪的齒移動經過感測器後產生的開關訊號。 在將訊號提供給處理器之前,感測器的交流電壓必須先轉換為方波電壓。 圖中我們看到介面左側有一個正弦交流電壓。 在介面電子元件中,此交流電壓被轉換為方波電壓。 然後定時器/計數器塊讀取該塊電壓:當脈衝為高電平時,計數器開始計數,當脈衝再次變高時停止計數。 計數的數量是周期時間的量測。 訊號的頻率。 使用定時器/計數器塊將脈衝產生器訊號轉換為數位訊號 在下圖中,我們看到來自感應式曲軸感測器的訊號,上側有紅點。 紅點設定為增加(邏輯 1)或減少(邏輯 0)模組電壓的電壓。 該圖像下方繼續進行解釋。 正弦交流電壓和無磁滯的數位化訊號 然而,感測器電壓從來都不是完全純淨的。 電壓曲線總是會有小的波動。 在這種情況下,介面電子裝置可能會錯誤地將其指示為邏輯 0,而實際上應該是 1。下面的示波器影像是在運行時記錄的 BMW Megasquirt 項目。 示波器影像顯示感應曲軸訊號(紅色)的數位化(黃色)。 影像清楚顯示黃色塊訊號中存在缺失脈衝,而此時曲軸訊號中沒有缺失齒經過。 不乾淨的數位訊號包含錯誤:缺少訊息 為了確保電壓曲線的微小波動不會導致 ECU 做出錯誤解釋,內建了所謂的遲滯。 遲滯是電壓曲線的上升沿和下降沿之間的差異。 在下圖中,我們看到上升沿上的紅點的電壓高於下降沿上的紅點的電壓。 這樣我們就可以確保訊號的微小波動不會影響數位轉換。在我們開始將脈衝訊號轉換為數位訊號的第一段中,已經提到訊號的頻率是根據方波訊號的兩個上升沿之間的時間來確定的。 在這些範例中,可以清楚推斷滯後確實影響方波訊號的寬度,但對上升沿之間的時間沒有影響,因此對訊號的頻率沒有影響。 帶遲滯的數位化脈衝產生器訊號 透過正確設定的磁滯,正弦訊號可以正確轉換為可用的方波電壓,只有缺齒經過的地方有多個邏輯訊號。請注意,在設定 MegaSquirt ECU 時,設定已更改,包括在上升線和下降線上觸發。 因此,當經過第一個範例中的缺失齒時,電壓為 0 伏,而在下方的示波器影像中,電壓為 5 伏特。 脈衝發生器訊號具有乾淨且正確的方波電壓 輸出訊號: 輸出訊號由數位開/關脈衝組成,電壓範圍為 0 至 5 伏特(TTL 電平),電流非常低。 然而,執行器需要以更高的電壓等級和電流進行控制。 開/關訊號可以進行脈寬調變(PWM),其中脈衝寬度可以以恆定頻率變化。下圖顯示了 TTL 電平的方波電壓作為時間的函數。 這 佔空比 該 PWM 訊號的 50%。需要驅動器來控制執行器。 透過數位輸出訊號,可以透過驅動器實現所需的電流。 在下一節中,我們將討論驅動程式。 範例:PWM 訊號 我們在每個 ECU 和某些執行器(例如 DIS 點火線圈)中都找到了驅動程式。 驅動器也稱為輸出級或功率電晶體。 此驅動器可將 TTL 電平的輸出訊號轉換為:0 至 5 伏特、來自 ECU 的 1 mA 低電流,轉換為高達 14 伏特的電壓和高達約 10 A 的電流。一個驅動程式可以連接多個 電晶體 包含。 我們稱這樣的電晶體為“達林頓電晶體」。 下圖顯示了以下電路:用於控制點火線圈的具有兩個電晶體的達林頓電路原理圖(來源:資料表 BU941ZR)。兩個電晶體,每個電晶體都有一個達林頓電路(BU941ZR)具有達林頓電路和附加電子裝置的驅動器 IC,用於溫度保護和微處理器回授等。 1.達林頓電路 2. 達林頓電晶體 (2x) 3. 具有多個達林頓電路的驅動IC 在頁面上: 執行器的控制方法 更詳細地討論了透過(功率)電晶體或 FET 對被動、主動和智慧執行器的控制。 相關頁面:執行器的控制方法;ECU 和數位電子產品概述頁面;邏輯閘電路;MOSFET;過程控制;晶體管;ECU 的操作。