denekler:
- tanıtım
- Sistem veri yolu
- İşlemci (CPU)
- RAM belleği
- ROM belleği
Giriiş:
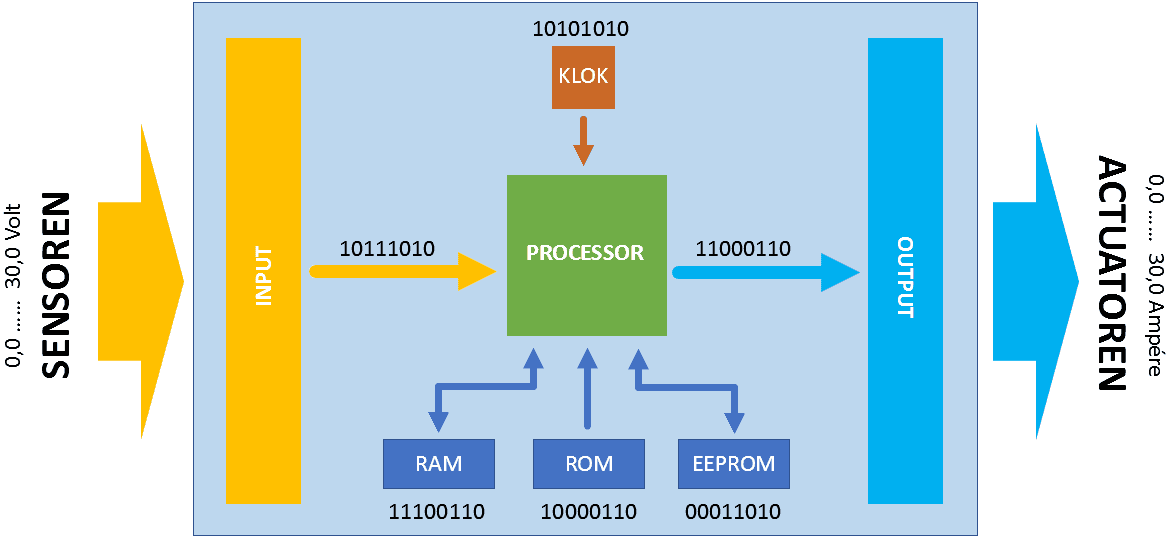
Bir ECU alır veya Sensörlerden gelen ölçüm verileri, bilgileri işler ve aktüatörleri kontrol etmek için hesaplamalar gerçekleştirir. Aşağıdaki şekil bir kontrol sisteminin blok diyagramını göstermektedir.
Sensörler fiziksel bir niceliğe yanıt veren sensörlerdir. Sensördeki elektronikler bunu elektrik sinyaline dönüştürür. ECU bu elektrik sinyalini “giriş” olarak alır ve bu sinyali önceden programlanmış değerle karşılaştırır. Sinyalin ne için olduğuna bağlı olarak aktüatör kontrolünün uygun şekilde ayarlanmasıyla kontrol gerçekleşir.
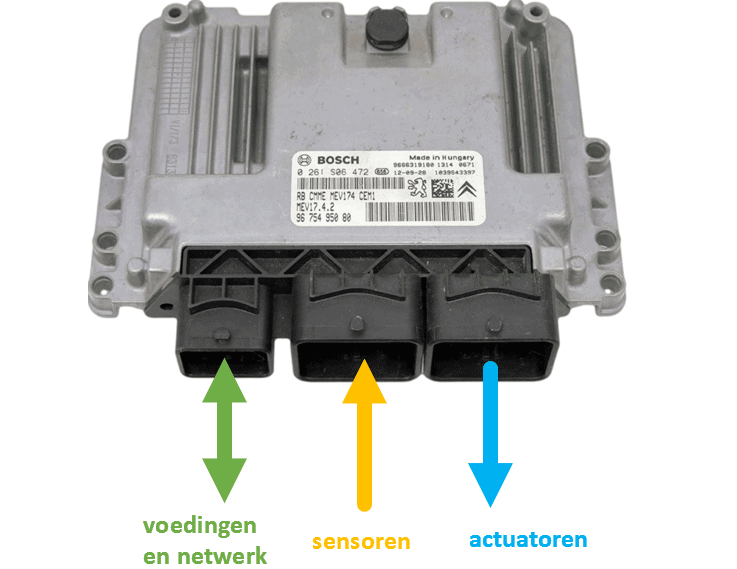
Aşağıdaki şekilde üç fiş bağlantılı bir ECU gösterilmektedir. Soldan sağa: güç kaynağı ve ağ, sensörler, aktüatörler.
Benzinli motor yönetim sisteminde diğerlerinin yanı sıra aşağıdaki sensörleri buluruz:
- krank mili hızını ölçmek için krank mili konum sensörü;
- soğutucunun ısınmasını ölçmek için soğutucu sıcaklık sensörü;
- gaz kelebeği valfinin konumunu ve dolayısıyla motor yükünü ölçmek için gaz kelebeği konum sensörleri;
- Negatif basıncı veya hava akışını ölçmek için MAP veya hava kütlesi ölçer;
- egzoz gazlarındaki oksijen içeriğini ölçmek için lambda sensörü;
- barometrik sensör ve emme havası sıcaklık sensörleri;
- Kontağı olabildiğince ilerletmek için vuruntu sensörü.
Yukarıdaki sensörler enjektörleri ve ateşleme bobinini/bobinlerini kontrol etmek için giriş görevi görür. Bu amaçla önceden programlanmış bir karakteristik alanda tüm sensör değerleri aranır.
Örnek olarak enjektör kontrolünü alıyoruz. Rölantide motor devrinde, enjektörler ÜÖN'den sonra x sayıda derece enjekte eder.
- Düşük soğutma sıvısı sıcaklığında enjeksiyon süresi uzar (zenginleştirme);
- Yavaşça hızlanırken enjeksiyon süresi de uzar. Ayrıca gaz pedalına ne kadar hızlı basıldığını takip eden bir ölçüm de yapılır: Aniden tam gaz basıldığında ilave zenginleştirme gerçekleşir;
- Emme manifoldundaki negatif basınç, enjeksiyon zamanlamasını ve süresini etkiler;
- Lambda sensörü (örneğin atlama sensörü) karışımın çok zengin veya çok fakir olup olmadığını ölçer. Karışım, birkaç krank mili dönüşü için çok zayıfsa, enjeksiyon süresi, karışım tekrar stokiyometrik hale gelene kadar yakıt trimleri kullanılarak uzatılır;
- Barometrik sensör ve emme havası sıcaklık sensörü, emilen havadaki oksijen seviyesini belirlemek için hava basıncını ve sıcaklığını ölçer.
Bu nedenle enjeksiyon süresi beş adede kadar sensörün değerlerine bağlıdır. Modern motorlarda daha fazla sensör bunda rol oynuyor.
Bir aktüatörün kontrol edilmesi sırasında ve sonrasında sensörler bilgileri ECU'ya geri gönderir. Ölçülen değer yazılımdaki istenen değerle karşılaştırılır. Bu, bir aktüatör kontrolünün sabit kalıp kalamayacağını, kısaltılmasının veya uzatılmasının gerekip gerekmediğini belirlemek için kullanılabilir. Bu nedenle ECU, bir kontrol döngüsü oluşturarak bir kontrolör görevi görür.
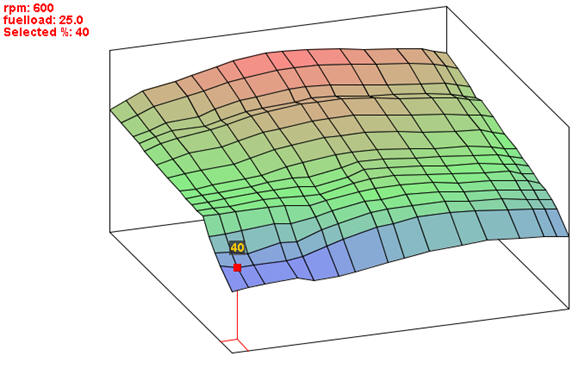
Aşağıdaki şekil, temel enjeksiyon süresinin, motor yükünün bir ölçüsü olan emme manifoldundaki düşük basınca kıyasla krank mili hızından belirlendiği bir diyagramı göstermektedir. Sıcaklıklar ve lambda sensörü bir düzeltme faktörü oluşturur ve her birinin kendi karakteristik alanı vardır.
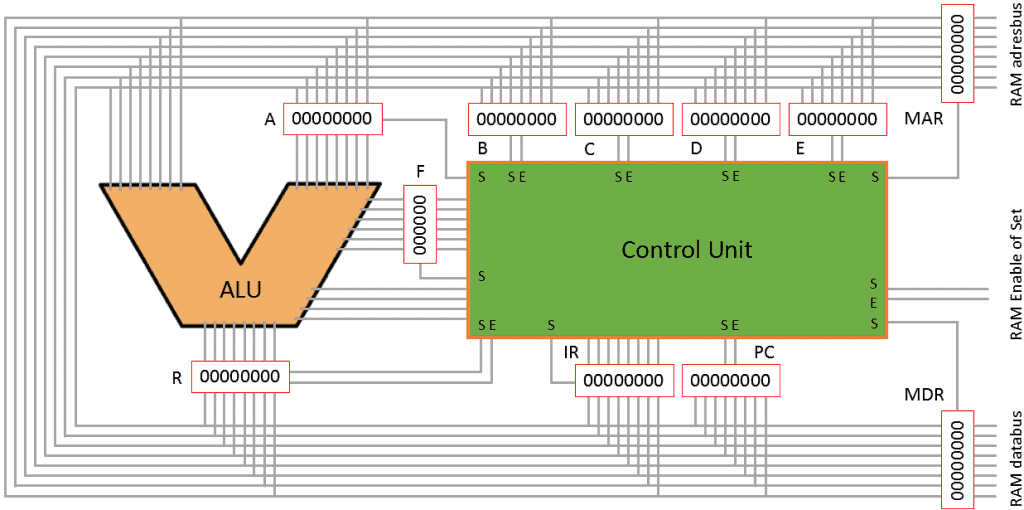
Sistem veri yolu:
Sistem veri yolu ECU'daki bileşenler arasında bağlantılar kurar (aşağıdaki resme bakın). ECU'nun üst kısmında saati buluyoruz. Bu osilatör adı verilen frekans genellikle 16 mHz olan kare dalga voltajı üretir. Saat frekansı kontrol ünitesinin hızını belirler. Bir kontrol döngüsündeki bileşenler bu zamanlayıcı tarafından koordine edilir.
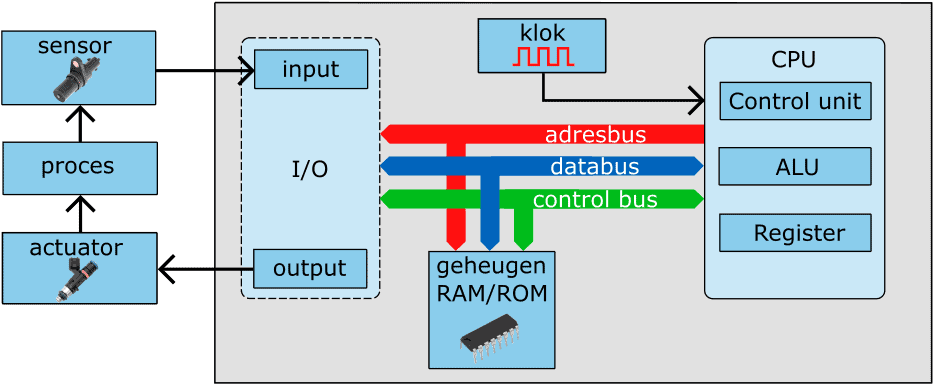
CPU, bellek ve G/Ç arayüzü (G/Ç, giriş / çıkış anlamına gelir), baskılı devre kartı üzerindeki birden fazla bağlantıdan oluşan bir sistem veri yolu ile birbirine bağlanır. Bunları şu şekilde ayırabiliriz:
- adres veri yolu: bu veri yolu, mikroişlemciden belirli bellek konumlarına veri aktarımını sağlar;
- veri yolu: bellek, CPU ve arayüzler arasındaki veriler, veri yolu aracılığıyla taşınır;
- kontrol veri yolu: sistem saatinin zamanlamasına bağlı olarak okuma ve yazma seçimleri, istekler ve sıfırlamalar yaparak denetleyici görevi görür.
İşlemci (CPU):
İşlemci (Merkezi İşlem Birimi) bilgisayarın kalbidir. Çok sayıda VE, VEYA ve DEĞİL kapısından oluşan kombinasyon devreleri ECU'da yazılım aracılığıyla oluşturulur. İşlemcinin üretimi sırasında bir dizi talimat (yazılım) hazırlanır. Bu talimatlar eylemleri gerçekleştirir ve bunları doğru sıraya koyar. Örnek:
- Alfabenin harfleri işlemcide dijital olarak saklanır. Gerçekte basit eylemleri temsil eden harfler değil, dijital talimatlar olacaktır;
- Harfleri doğru sıraya koyarak sözcükler oluşturabiliriz;
- kelimeleri doğru sıraya koyarak cümleler kurabiliriz;
- cümleler hikayeyi oluşturuyor: gerçekte bilgisayar programı.
İşlemcinin bildiği talimatları doğru sıraya koyacak program, programcı tarafından yazılıma eklenmiştir. Bu program ECU'nun flash belleğine yüklenir.
ECU çalıştırıldığında talimatlar flash bellekten alınır ve işlemci tarafından saate göre teker teker yürütülür. Program çalışıp bittikten sonra döngü yeniden başlar.
Ateşleme zamanlamaları gibi verileri yüklemek için gereken veriler ROM belleğinden yüklenir. İşlemci ROM belleğinden önyükleme yapar ve verileri ROM'dan RAM'e kopyalar. Önyükleme sonrasında CPU, tüm verileri ve komutları hızlı RAM belleğinden alır. Verilerin ve hesaplanan ara değerlerin geçici olarak saklanması için nispeten küçük bir RAN belleği gereklidir.
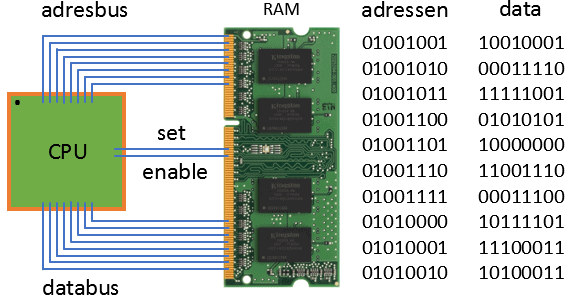
CPU belleğe bir adres yolu ve veri yolu aracılığıyla bağlanır.
- Ayarla: bitler RAM'de saklanır
- Etkinleştir: bitler RAM'den alınır
RAM'deki bitler ve baytlarca veri şunları içerebilir:
- sayılar: sensörlerden gelen veriler / aktüatörlere giden veriler / hesaplamalar
- sensörlerin (giriş) ve aktüatörlerin (çıkış) adresleri
RAM'deki veriler şunlar olabilir:
- harfler: ASCII kodları, sayılar, harfler, semboller
- talimatlar: işlemci talimat seti
İşlemci, ISA (Komut Seti Mimarisi) adı verilen bir komut setine veya komut setine göre çalışır. ISA, üretici tarafından programlanan ve işlemci tarafından kullanılan talimatların bir listesidir. ISA, işlemciye göre farklılık gösterir ve büyük ölçüde işlemcinin kullanıldığı uygulamaya bağlıdır. Aşağıda bazı örnekler verilmiştir:
- LOAD işlemci RAM belleğinden bir değer alır
- STORE işlemci RAM belleğinde bir değer saklar
- ADD işlemci iki sayıyı birbirine ekler
- CLR işlemci RAM belleğindeki bir değeri temizler
- KARŞILAŞTIRMA işlemci iki sayıyı birbiriyle karşılaştırır
- JUMP IF işlemci RAM'deki belirli bir bellek adresine atlarsa (karşılaştırma koşulu)
- OUT işlemci bilgiyi bir çıkışa gönderir
- İşlemcide bir girişten bilgi talep edilir
Bir işlemcinin tam saat hızında çalışabilmesi için dahili RAM belleği kullanır. Bunlara “kayıtlar” denir. Kayıtlar birçok dijital sistemde özellikle önemli fonksiyon bloklarıdır. Bir ikili sayıyı geçici olarak tutabilen (böylece hatırlayabilen) bir dizi flip-flop devresinden oluşurlar. Farklı kayıt türleri şunlardır:
- A kaydı: ALU'ya A girişi için kayıt
- B kaydı: ALU'ya B girişi için kayıt
- Çalışma kaydı: genel amaçlı, (geçici) sonuçların saklanması için
- Talimat Kaydı: İşlemci için yürütülecek mevcut talimat burada saklanır
- Adres kaydı (program sayacı): yürütülecek bir sonraki talimatın adresini içerir
- Bayrak kaydı: sayı (bir hesaplamadan sonra): sıfır, negatif, pozitif, çok büyük, çift veya tek
- Kayan Nokta Kaydı: ondalık noktadan sonra basamakları olan sayı
- Kaydırma kaydı: verilerin her saat darbesi sırasında bir bit kaydırıldığı bellek
- Bellek Veri Kaydı: bellek verileri için CPU ve RAM arasında tampon
- Bellek Adres Kaydı: bellek adresi için CPU ve RAM arasında tampon
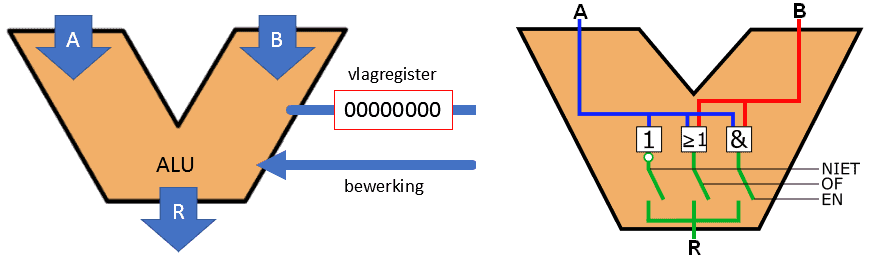
ALU (Aritmetik Mantık Birimi) tüm aritmetik ve mantıksal işlemleri (AND, OR, NOT, vb.) gerçekleştirir.
- ALU'ya 2 giriş: A ve B
- 1 giriş: ALU hangi işlemi gerçekleştirmelidir?
- 1 çıkış: R (Sonuç) bir kayda gider
- 1 çıkış: bayrak kaydı
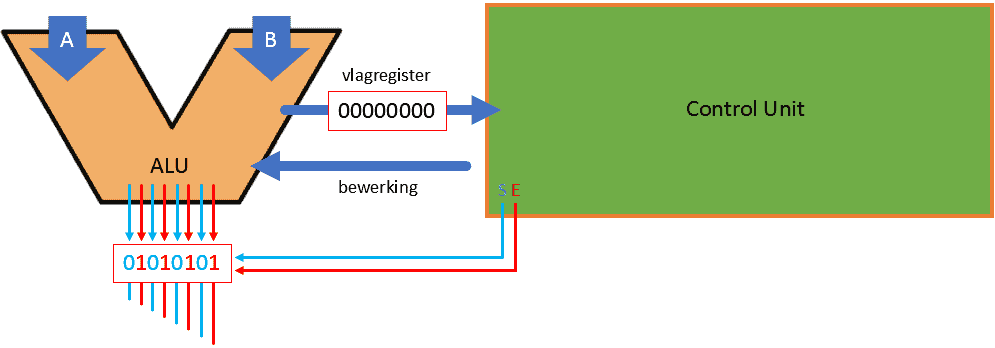
1. ALU 01010101 göndermek istiyor
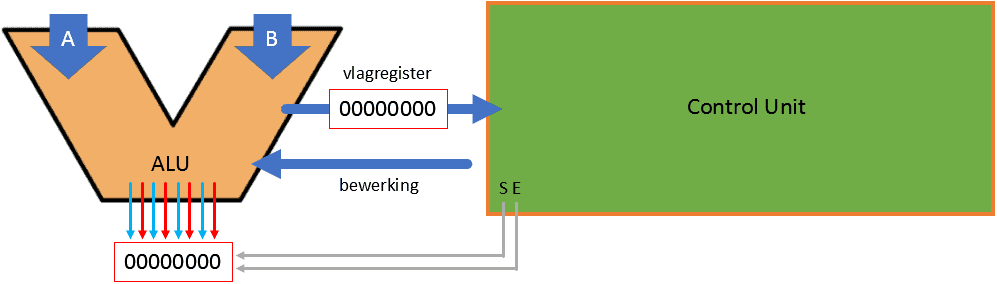
2. Öncelikle Kontrol Ünitesi “1” setini oluşturmalıdır.
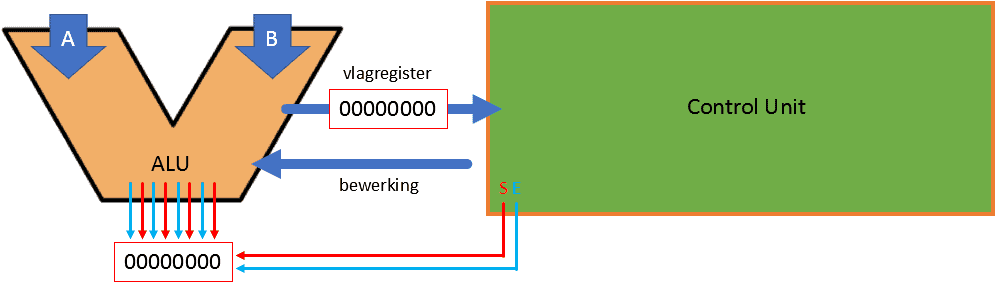
3. Kayıt tamamlandı
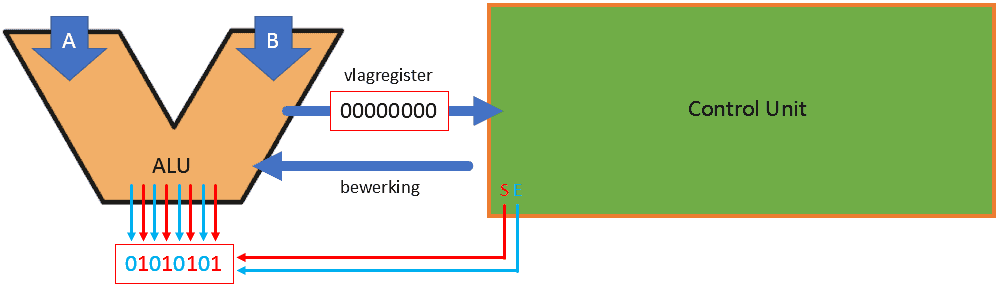
4. Bundan sonra Enable “1” yapılır.
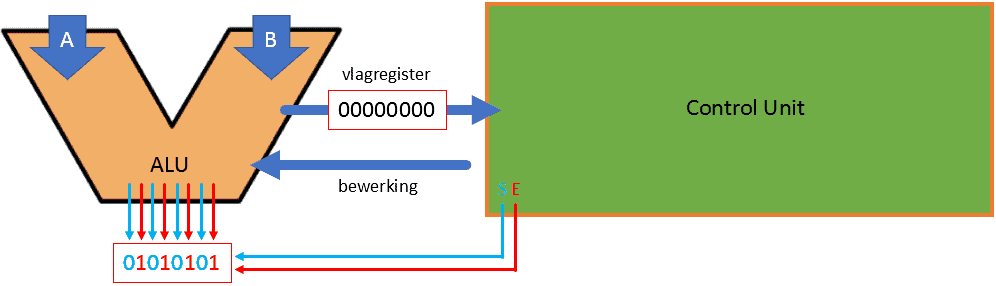
5. ALU'dan gelen veriler bir veriyoluna aktarılır
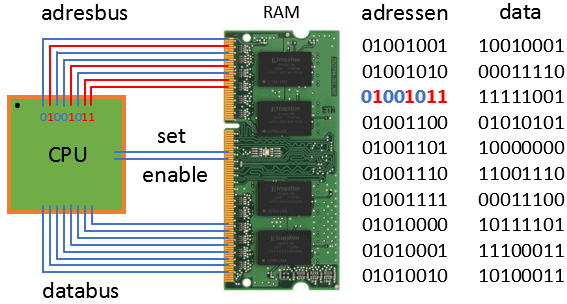
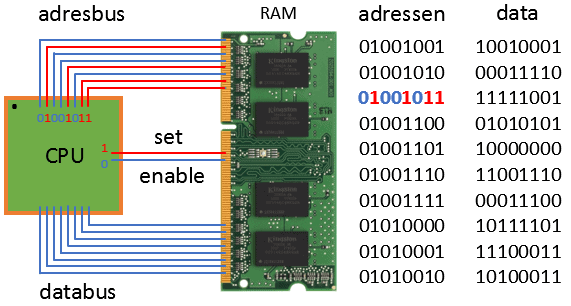
CPU RAM'den veri almak istiyor:
1. CPU, RAM'e bir adres gönderir (01001001)
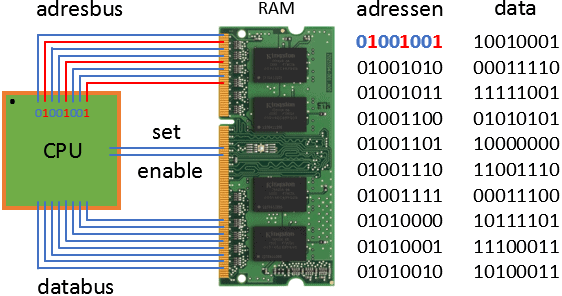
2. CPU bilgi almak istiyor; “etkinleştir” = 1
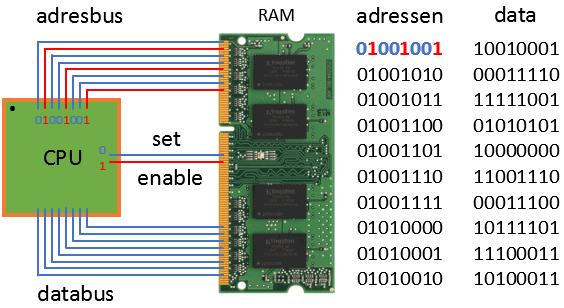
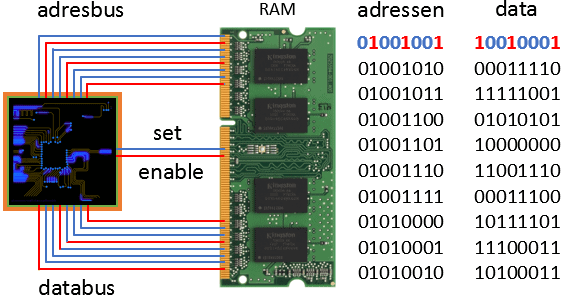
3. RAM, 01001001 adresinden CPU'ya veri gönderir
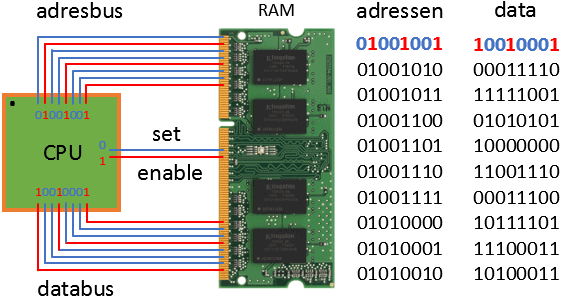
4. CPU bilgiyi işler
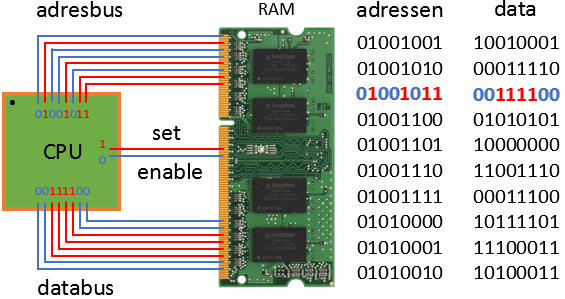
CPU verileri RAM'de depolamak istiyor:
1. CPU, RAM'e bir adres gönderir (01001011)
2. CPU bilgi depolamak istiyor; “ayarla” = 1
3. CPU, veriyi (00111100) RAM'deki 01001011 adresine gönderir.
RAM'deki verilerin üzerine şu andan itibaren yazılır: 11111001'den: 00111100'e
ROM belleği:
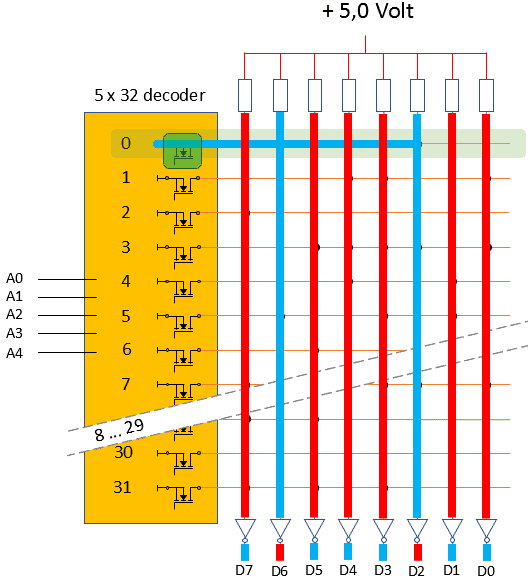
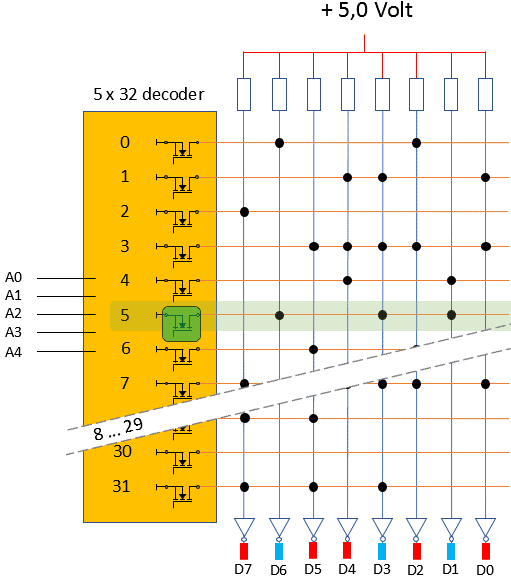
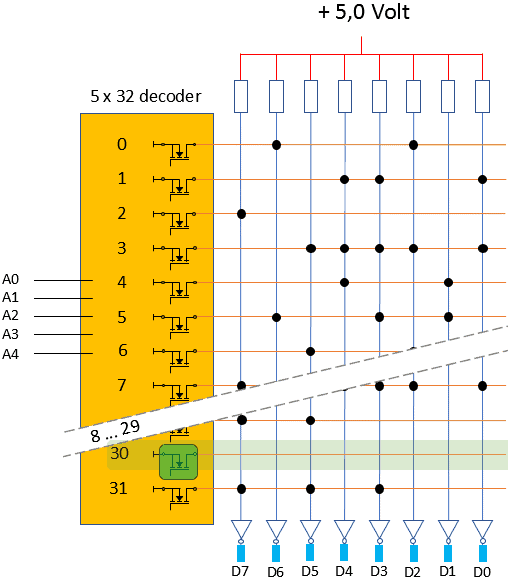
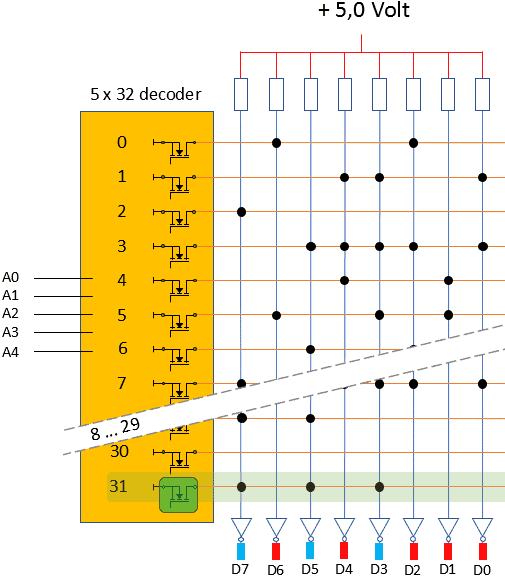
ROM şu kısaltmanın kısaltmasıdır: Salt Okunur Bellek. Bu bellek üretici tarafından programlanmıştır. Bellek devresi sabit bağlantılarla düzenlenmiştir. ECU, yazılım programını (önyükleme) ROM belleğinden başlatır. ROM belleği yavaş bir bellektir. Başlatma sırasında veriler ROM'dan RAM'e kopyalanır.
Aşağıda ROM'u okumaya ilişkin dört örnek verilmiştir.




İlgili sayfalar: