denekler:
- Motor yönetim sistemi için sensörleri belirleyin ve kurun
- Krank mili konum sensörü
- Darbe tekerleği
- Harita sensörü
- Soğutucu sıcaklık sensörü
- Lambda sondası
Motor yönetim sistemi için sensörleri belirleyin ve kurun:
Motor yönetim sistemi bir dizi sensör gerektirir. Sensörler sistemin “girdisi” olarak görev yapar. Sensörler, fiziksel bir miktarı bir bilgisayar (bu örnekte MegaSquirt) tarafından işlenebilecek bir elektrik sinyaline dönüştürür.
MegaSquirt'in yapısı farklılık gösterebileceğinden, MegaSquirt'in montaj sürecinde motora monte edilecek bileşenler dikkate alınmalıdır.
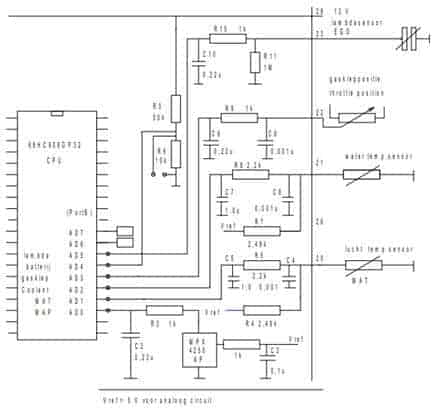
Şekilde bu bileşenlerin bulunduğu farklı sensör devreleri gösterilmektedir. Şekilde gösterilen giriş sinyalleri lambda sensöründen, gaz kelebeği konum sensöründen, soğutucu sıcaklık sensöründen ve hava sıcaklık sensöründen gelir.
Diyagramda sensörlere ek olarak bir dizi direnç ve kapasitör de bulunur. Bu bileşenlerin bileşimi filtreleri oluşturur; Bu filtreler parazit sinyallerini ve gürültüyü yakalamaya yarar. Sensör sinyali gürültü nedeniyle bozulursa, bunun aktüatörlerin kontrolü ve dolayısıyla motorun çalışması açısından önemli sonuçları olabilir.
Krank mili konum sensörü:
Motor yönetim sistemi için önemli bir girdi krank mili hızıdır.
Krank mili hızı, bir krank mili konum sensörü ve darbe çarkı kullanılarak ölçülür. Krank mili konum sensörünün iki önemli işlevi vardır:
- Krank mili hızı, sinyalin frekansına göre belirlenebilir;
- Darbe çarkındaki eksik diş, silindir 1 ve 4'ün pistonlarının ÜÖN'den birkaç derece önde olduğu krank mili konumunu gösterir.
Motor devri enjektörlerin ve ateşlemenin kontrolünü etkiler. 36-1 darbe çarkındaki eksik diş, ateşleme ve enjeksiyon sürelerinin belirlenmesi açısından önemlidir. Hız sensörü olarak indüksiyon darbe üreteci yerine Hall sensörünün kullanılmasına karar verildi. Endüktif bir sensör, MegaSquirt kontrol cihazında doğrudan voltaja dönüştürülmesi gereken bir alternatif voltaj üretir. Bir Hall sensörü, dahili veya harici bir çekme direnci ile 5 veya 12 voltluk bir voltaja yükseltilen bir kare dalga voltajı üretir. Bu, Hall sensörünü güvenilir bir sinyal oluşturmak için daha uygun hale getirir. Bu seçim MegaSquirt'in montajı yapılmadan önce yapılmalıdır; her iki sensör de farklı bir devre yapısı gerektirir.
Darbe tekerleği:
Krank mili konum sensörü, motora monte edilmiş darbe çarkının hava aralığındaki değişikliği ölçer. Ancak Land Rover motorunda orijinal olarak krank mili konum sensörü yoktur ve bu nedenle darbe çarkı yoktur. Bu nedenle darbe çarkının daha sonra takılması gerekiyordu. Nabız çarkının yeri ve konumu üzerinde çok düşünüldü. Olasılıklar şunlardı:
- Krank mili kasnağının dışına kelepçe veya cıvata bağlantısıyla bağlanan 36 dişli bir disk.
- Mevcut krank mili kasnağının, kasnaktan dişleri frezeleyerek ayarlanması.
36-1 veya 60-2 darbe çarkının kullanılması yaygındır. 60 dişli darbe çarkı esas olarak daha büyük çaplar için kullanılır. 36-1 diş genişliği nedeniyle kullanıma uygundur. Darbe çarkının mümkün olduğunca az yükseklik hareketi yapması çok önemlidir. Yükseklik değişikliği, sensör ile darbe çarkının dişleri arasındaki manyetik alanda bir değişiklik anlamına gelir. Bunun motorun çalışması üzerinde olumsuz sonuçları olabilir. Bunun elbette önlenmesi gerekiyor. Bu nedenle mevcut krank mili kasnağının ayarlanması tercih edildi. Mevcut krank mili kasnağının dış kenarı bir freze makinesinde işlenir. Malzeme kaldırılarak çentikler oluşturulmuştur. Geriye kalan 36 diş, sensörün manyetik alanlardaki değişiklikleri ölçmesine olanak sağlar. Referans noktası için bir diş taşlanmıştır. Aşağıdaki resim işlenmiş krank mili kasnağını göstermektedir.
Taşlanmış diş, darbe çarkının üst kısmında, sensörün hemen altında görülebilir. Krank milinin bu konumda olması, silindir 1 ve 4'ün pistonlarının ÜÖN'de olduğu anlamına gelmez, ancak bu pistonların ÜÖN'den 90 derece önce olduğu anlamına gelir, bu da 9 dişe (360/36) karşılık gelir. Eksik diş geçtiği anda MegaSquirt ateşlemenin yakında gerçekleşmesi gerektiğine dair bir sinyal alır. Bu noktadan itibaren ateşleme bobininin ne zaman etkinleştirilmesi gerektiği hesaplanır. Değişen çalışma koşullarında ön ateşleme süresi de bu referans noktasına göre belirlenir.

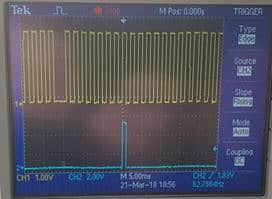
Osiloskoptan alınan görüntü (resme bakın), krank mili sinyalinin (üstte) ateşleme bobini kontrol sinyaliyle (altta) karşılaştırılmasını gösterir. Ateşleme bobinine giden kontrol darbesi, eksik olandan sonraki sekizinci dişte oluşturulur. Motor rölantideyken ateşleme 10 derece ilerletilir, bu da 1 diş anlamına gelir. Bu, çıkarılan diş ile gerçek üst ölü merkez arasındaki 90 dereceye (9 diş) karşılık gelir.
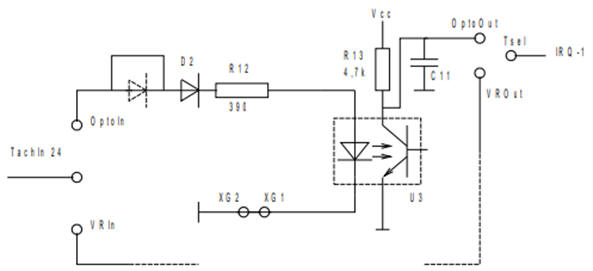
Hall sensörü devresini MegaSquirt'e monte etmek için C11 kondansatörü, R12 ve R13 dirençleri, D2 diyotu ve U3 optokuplör kurulmalıdır (aşağıdaki şekle bakın). Hall sensöründen gelen sinyal, şekil 105'teki şemaya "Opto girişi" altında girer. Sinyal, diyot ve direnç aracılığıyla optokuplör adı verilen yere ulaşır. Bu bileşen kesik kesik çizgiyle gösterilir. Opto-bağlayıcı, sol taraftaki LED'in yandığında sağ taraftaki fototransistörü ilettiği küçük bir entegre devredir. Opto-bağlayıcı, kontrol ve anahtarlama parçaları arasında mekanik veya elektriksel bağlantıları olmayan bir anahtar olarak görülebilir.
Optokuplördeki transistör iletken olduğunda, Vcc'den toprağa küçük bir akım akabilir. O anda “Opto Out”ta 0 volt gerilim vardır. Transistör iletken değilse, akım yoktur ve dolayısıyla R13 direncinde voltaj düşüşü olmaz. “Opto out” üzerindeki voltaj bu durumda 5 volttur.
Bir optokuplör kullanılarak diyot ve fototransistör arasında galvanik bir ayırma yapılır. Arıza gerilimi genellikle 5 kV'tan büyük olduğundan, tehlikeli girişim gerilimleri mikro denetleyici devresinden uzak tutulur.
Harita sensörü:
Bir MAP sensörü (Manifold Mutlak Basınç sensörü) emme manifoldundaki basıncı ölçer. MegaSquirt, motora giren hava miktarını hesaplamak için bu basıncı, motor devrini ve giriş sıcaklığını kullanır. Land Rover motoruyla mutlak basınç (dış hava basıncı) veya negatif basınç ölçülecektir. Bu, kendi havasını emen doğal emişli bir motordur. Turbo ile donatılmış motorlar, emme manifoldundaki aşırı basınçla uğraşmak zorundadır. Bir MAP sensörünün ölçüm aralığı genellikle 0,2 ila 1.1 bar arasındadır.
Emme manifoldundaki basınç, gaz kelebeği valfinin açılma açısı (gaz kelebeği konum sensörüyle ölçülür) ve motor hızıyla birlikte motor yükünü belirleyebilir. MAF sensörünün (Manifold Hava Akışı) bulunmamasından dolayı, içeri çekilen hava miktarı, motor verilerine ve emme manifoldundaki negatif basınca göre hesaplanır. Sinyal motor için tasarlanmadığı için daha az güvenilir olduğundan MAF sensörünün kullanılmamasına karar verildi. Ayarları emme manifoldu özellikleriyle eşleştirmek karmaşıktır. Bunun için birçok düzeltme faktörüne ihtiyaç vardır.
Kullanılan MPX4250AP MAP sensörü şekilde gösterilmiştir. MegaSquirt devre kartı standart olarak bu tip MAP sensörü için bağlantı seçenekleriyle donatılmıştır. Bu sensör aynı zamanda inşaat kitinde standart olarak bulunur. Enjekte edilen yakıt miktarı diğer şeylerin yanı sıra mevcut hava miktarına bağlıdır çünkü stokiyometrik bir karışım oranı (14,68 kg hava ila 1 kg yakıt) elde edilmeye çalışılmaktadır. Hem MAF hem de MAP sensörlerini kullanmama seçeneği vardı. Daha sonra içeri çekilen hava miktarı, Alfa-N düzenlemesi adı verilen düzenlemeye göre belirlenecektir. Mevcut hava miktarı açısından belirleyici olan gaz vanasının konumu dikkate alınır. Ancak bu, MAP sensöründen daha az doğru olduğundan bu seçilmedi. Bu projede gaz kelebeği konum sensörü yalnızca hızlanmanın zenginleştirilmesi için kullanılıyor.

Soğutucu sıcaklık sensörü:
Klasik kurulumda motor bloğunda sıcaklık sensörü yoktur. Motor standart olarak, soğutma suyu sıcaklığı çok yüksek olduğunda gösterge paneli ışığını açma işlevine sahip bir bimetal ile donatılmıştır. Motor yönetim sistemi soğutma sıvısının ve emme havasının sıcaklığını dikkate aldığından, NTC dirençlerinin yenilenmesine karar verildi. Bir NTC direnci negatif bir sıcaklık katsayısına sahiptir. Bu, sıcaklık arttıkça direnç değerinin azaldığı anlamına gelir. Seçilen soğutucu sıcaklık sensörü 2,5⁰ Celsius'ta 25 kiloohm direnç değerine sahip bir sensördür. Direnç değişimi en önemli sıcaklık aralığında en fazladır. Doğru sıcaklığı hesaplamak için NTC direncinin özellikleri haritalandırılmalıdır.
Direnç değişimi, 0⁰C ile 60⁰C arasındaki sıcaklık aralığındaki değişiklikle en fazladır. Bu, özelliğin gidişatından da görülebilmektedir; bahsedilen sıcaklık aralığında yaklaşık 5kΩ'luk bir direnç düşüşü vardır, T ≥ 60⁰C'de ise direnç neredeyse hiç azalmaz. Bazı durumlarda 60°C'nin üzerindeki sıcaklıkların da ölçülmesi istenebilir. Bunu mümkün kılmak için dahili öngerilim direnci, belirli bir sıcaklıkta farklı bir değere sahip bir öngerilim direncine dönüştürülebilir. Bu, iki NTC karakteristiği üretir. Ancak bu projede soğutma sıvısı sıcaklığı yalnızca soğuk çalıştırma zenginleştirmesi için kullanılıyor ve bu da 60°C'nin üzerinde neredeyse hiç kullanılmıyor.
Düşük sıcaklıklar da en ilginç olanıdır; soğuk başlangıç zenginleştirmesi burada gerçekleşecek; motor soğukken enjektör daha uzun süre çalıştırılır. Motor yeterince ısındığında (T ≥ 60⁰C), giderek daha az zenginleşme meydana gelir. T = 90⁰C'den itibaren enjeksiyon stratejisi referans alanındaki ayarlanan değerlere göre çalışır. Referans alanı girilen varsayılan bir değerdir. Düşük sıcaklıkta soğuk başlatma zenginleştirmesi gibi dış faktörler bu standart değere yönelik bir düzeltme faktörü oluşturur. MegaSquirt artık soğutma sıvısı sıcaklığını hesaba katmıyor.
Lambda probu:
Egzoz gazlarındaki hava/yakıt oranını ölçen bir lambda sensörü (sensör) egzozun içine monte edilmiştir. Lambda sensörünün daha sonraki bir aşamada AFR ve VE tablolarını tamamlayarak motor yönetimini "ayarlamak" gibi önemli bir görevi vardır. İdeal karışım oranı ve zenginleştirmenin veya fakirleştirmenin yararlılığı ve gerekliliği hakkında fikir edinmek için ilk önce stokiyometrik karışım oranı, zenginleştirme ve tükenme tanımlanır.
Stokiyometrik karışım oranı, havadaki tüm oksijenin kullanıldığı hava ve yakıt arasındaki oranı gösterir. Bu, 14,68:1 oranındaki durumdur (14,7 kg havanın 1 kg benzine yuvarlanması). Daha sonra λ = 1 hakkında konuşacağız.
Lambda değeri farklı çalışma koşullarında değişiklik gösterebilir:
- Zenginleştirme: λ < 1;
- Yoksullaştırma: λ > 1.
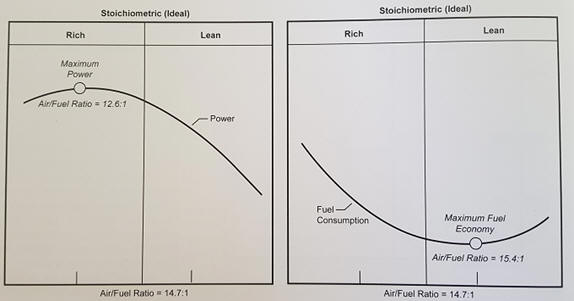
λ = 0,8'e kadar zenginleştirme, 11,76 kg havanın 1 kg benzine karışım oranının geçerli olduğu anlamına gelir. Yani 1 kg yakıtı yakmak için daha az hava kalır. Karışımın zenginleştirilmesi veya tüketilmesi her zaman patlama sınırları dahilinde kalmalıdır. Zenginleştirme, motorun daha fazla güç sağlaması gerektiğinde gerçekleşir. Daha zengin bir karışım aynı zamanda soğutma da sağlar. Yağsız karışım ise daha iyi yakıt tüketimi sağlar. Aşağıdaki resimde maksimum güç ve en düşük yakıt tüketimini gösteren iki grafik gösterilmektedir.
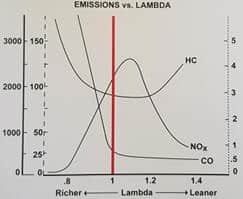
Lambda değeri yalnızca gücü ve yakıt tüketimini değil aynı zamanda egzoz emisyonlarını da etkiler. Daha zengin bir karışım, daha düşük NOx içeriğinin yanı sıra daha yüksek CO ve HC emisyonları sağlar. Daha fakir bir karışımda, yakıt parçacıkları daha da ayrılıyor, böylece yanma artık optimal olmuyor; bunun sonucunda HC emisyonları da artar. Aşağıdaki resimde lambda değerine ilişkin emisyonlar gösterilmektedir. Bir katalizör kullanıldığında, enjeksiyonun sürekli olarak zengin ve fakir arasında değişmesinin sağlanması arzu edilir. Zengin bir karışımda, katalizörün NOx'i azalttığı oksijen eksikliğinin bir sonucu olarak CO oluşur. Yalın bir karışım, CO ve HC'yi oksitleyen fazla miktarda oksijen içerir.
İki tip lambda sensörü vardır; atlama sensörü ve geniş bant sensörü. MegaSquirt her iki türü de destekler. Ancak VE tablosunu ayarlarken atlama sensörü uygun değildir ve bu nedenle geniş bant sensörünün kullanılmasına karar verildi. VE tablosu, VE değerlerinin ölçülen AFR'ye ayarlanmasıyla ayarlanır. VE değerleri prensipte hesaplamalar yoluyla ve büyük ölçüde tork eğrisine dayalı olarak girilebilse de, AFR hızla atlama sensörünün aralığının dışında kalır. Geniş bantlı bir sensör, geniş ölçüm aralığı nedeniyle bir çözüm sunar; AFR'yi 8,0 ila 1,4 arasında ölçebilir. Karışım bileşimi neredeyse her durumda motor çalışırken bu ölçüm aralığında olacaktır, dolayısıyla geniş bant sensörü VE tablosunu ayarlamak için uygundur. Geniş bant sensörü olmadan ayarlama yapmak neredeyse imkansızdır.
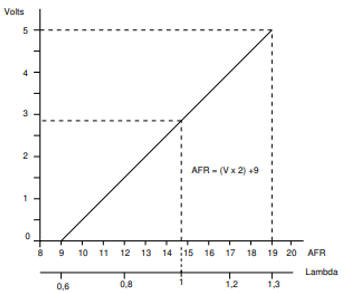
MegaSquirt'in dahili bir lambda denetleyicisi yoktur. Geniş bant sensörünün özellikleri öğrenildikten sonra TunerStudio programındaki bir tabloya girilebilir. Diğer durumlarda harici denetleyiciye sahip bir geniş bant sensörü gereklidir. Çıkış voltajı harici kontrolör tarafından doğrusal hale getirildi. Kontrol cihazından MegaSquirt'e giden çıkış voltajı 0 ila 5 volt arasındadır ve lambda değeri ile voltaj arasındaki ilişki doğrusaldır. MegaSquirt'te voltaj değeri lambda değerine dönüştürülür. Şekil doğrusal gradyanlı grafiği göstermektedir.
sonraki: Aktüatörler.