denekler:
- Genel
- Tek noktalı enjeksiyon sistemi için kısma valfi
- Çok noktalı enjeksiyon sisteminde kısma valfi
- Boşta kalma kontrolü
- Daha büyük motorlar için gaz kelebeği kontrolü
- Gaz kelebeği konum sensörü
- Elektronik gaz pedalı (tel ile gaz)
Genel:
Her benzinli motorda bir gaz kelebeği bulunur. Gaz kelebeği silindire giren hava miktarını ayarlayabilir. Dizel motorlarda da gaz kelebeği bulunur ancak motor çalışırken daima tamamen açıktır. Bunun nedeni dizel motorun fazla havayla çalışmasıdır. Dizel motorlardaki gaz kelebeği valfi yalnızca motorun sorunsuz bir şekilde kapanmasını sağlar; vana kapandığında hava beslemesi kapatılır. Daha sonra motor hemen kapanır. Bu nedenle yakıt beslemesi durdurulur. Dizel motorda buna gaz kelebeği yerine gaz kelebeği valfi de denir. Aslında benzinli bir motordaki gaz kelebeği valfi aynı zamanda bir gaz kelebeği valfidir: Tam yük dışındaki tüm koşullarda hava kısılır.
Tek noktalı ve çok noktalı enjeksiyon sistemleriyle ilgili sonraki bölümler elbette benzinli motorlarla ilgilidir.
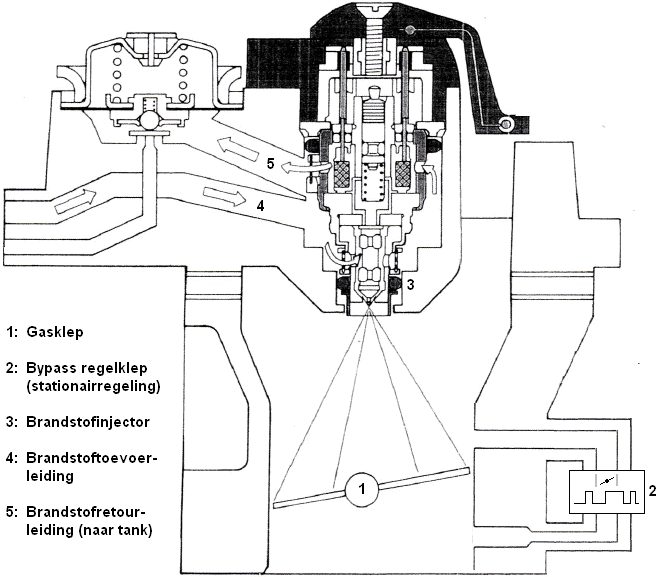
Tek noktalı enjeksiyon sistemine sahip kısma valfi:
Tek enjeksiyonlu motorlar için (tek nokta enjeksiyon sistemi) gaz kelebeğinin önüne bir enjektör monte edilmiştir. Bu enjektör yakıtı doğrudan gaz kelebeği üzerine püskürtür. Bu teknoloji eskidir ve artık yeni arabalarda kullanılmamaktadır. Çünkü bu sistemin bir takım dezavantajları vardır. Enjektör gaz kelebeği üzerine enjeksiyon yaptığı için oradaki havaya karışır. Emme manifoldu 4 veya daha fazla silindire bölünmüştür. Yakıt miktarı her zaman tüm silindirlerde tam olarak aynı olmayacaktır. Örneğin 1. silindir havadaki en fazla yakıtı alırken, 4. silindir çok daha az yakıt alır. Bu nedenle sistem ayarlanamıyor veya neredeyse hiç ayarlanamıyor. Bu nedenle tek noktanın kullanımı mevcut çevre gerekliliklerini karşılamaya uygun değildir.
Günümüzde silindir başına tam olarak aynı miktarda yakıtı enjekte eden birden fazla enjektör kullanılmaktadır. Miktar daha sonra silindir başına bile düzenlenebilir. Biz buna böyle diyoruz çok noktalı enjeksiyon sistemi.
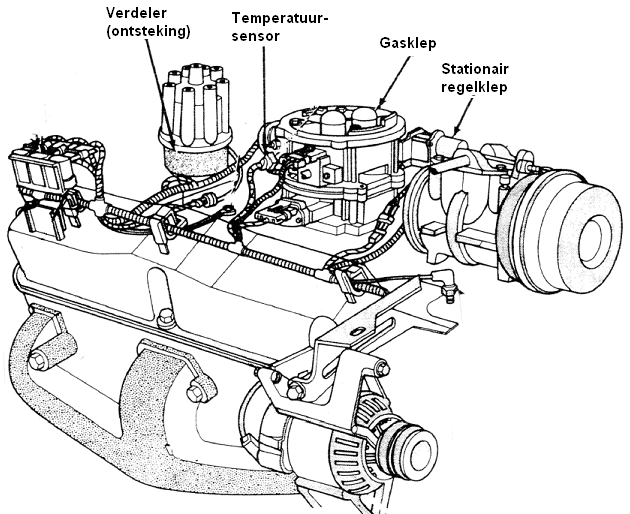
Çok noktalı enjeksiyon sistemine sahip kısma valfi:
Çoklu enjeksiyonlu (çok noktalı enjeksiyon sistemi) motorlarda, dolaylı enjeksiyon için enjektörler, gaz kelebeği valfinden sonra emme manifolduna monte edilir. Enjektörler motorun emme valflerine püskürtür. Direkt enjeksiyonda enjektörler doğrudan yanma odasına enjeksiyon yapar. Hem dolaylı hem de direkt enjeksiyonlu motorlarda aşağıda gösterildiği gibi monte edilmiş bir gaz kelebeği gövdesi bulunur. Valvetronic (BMW) ve Multi-air (Fiat) motorlara sahip motorlar istisnadır. Gaz kelebeği gövdesi, emme manifoldu ile hava kütle ölçerli boru arasına monte edilir. Bu, elektronik bir gaz pedalı (tel ile tahrik) veya bir gaz kelebeği kablosu (Bowden kablosu) kullanılarak elektriksel olarak kontrol edilebilir.
Günümüzde kullanılan motor yönetim sistemleri gaz kelebeği konum kontrolünü kullanır. Gaz kelebeği üzerindeki ayar motoru, kısma valfinin konumunun değiştirilebilmesini sağlar. Bu hız sabitleyici veya rölanti kontrolü için olabilir. Potansiyometreler gaz kelebeği valfinin konumunu ölçün. Motor kontrol ünitesi (ECU) potansiyometrelerden değerleri alır ve ardından gaz kelebeği valfini daha fazla açmak veya kapatmak için çalıştırma motorlarını kontrol edebilir.
Boşta kontrol:
Hızlanmak için gaz pedalına basılır. Gaz kelebeği açılır, böylece daha fazla miktarda hava emilebilir. Yavaşlarken veya rölantideyken gaz pedalı çalıştırılmaz; burada gaz kelebeği kapalı. Hava geçişini sağlamak için rölanti kontrolü kullanılır. Rölanti devri, motor yönetim sistemi tarafından mümkün olduğu kadar düşük tutulur. Rölanti devri ne kadar düşük olursa, yakıt tüketimi ve motor aşınması da o kadar düşük olur. Rölanti devri çok düşük olmamalıdır; Bu, motorun düzensiz çalışmasına neden olur ve durma ihtimali vardır. İstenilen rölanti hızı her zaman aynı değildir. Emilen havanın sıcaklığı, klimanın açık olması, debriyaj pedalının konumu veya otomatik şanzıman vites kolunun konumu rölanti kontrolünü etkiler. Hız kontrolünün stabilizasyonu çeşitli yollarla sağlanabilir:
- dolum seviyesi kontrolü. En yaygın olarak ateşleme zamanlamasının ayarlanmasıyla birlikte kullanılır.
- Karışım bileşimini değiştirin. Bunun egzoz emisyonları üzerinde olumsuz etkisi vardır ve kontrol aralığı sınırlıdır.
- ateşleme zamanlamasını ayarlayın. Bunun emisyonlar üzerinde de olumsuz bir etkisi vardır, ancak son derece hızlı kontrole olanak sağlar.
- valf zamanlamasını ayarlayın. Bu, mevcut dolum seviyesi kontrolüne ek olarak ek bir kontrol seçeneği sunar.
Dolum seviyesi kontrolü, gaz vanasının dışında hava sirkülasyonuna veya gaz vanasının ayarlanmasına izin veren bir baypas vanası kullanır.
Baypas valfi:
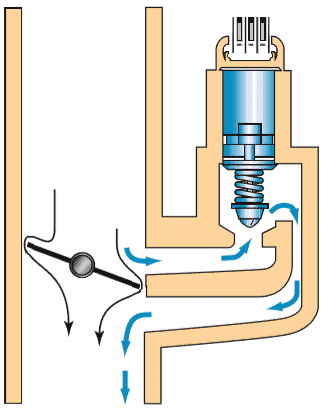
Bir baypas valfi, gaz kelebeği valfinin dışındaki hava beslemesini açar veya kapatır, böylece rölanti hızı sabitlenir. Aşağıdaki resimde solda kısmen açık bir gaz kelebeği valfi gösterilmektedir. Sağ tarafta, açık bir baypas valfi, havanın motor tarafından baypas kanalına çekilmesine olanak sağlar. Kısma valfi daha fazla açıldığında by-pass valfi kapanacaktır. Sonuçta baypas yalnızca gaz vanası kapalıyken gereklidir. Motor yönetim sistemi baypas valfinin ne kadar açılması gerektiğini belirler. Gaz kelebeği valfinin açılma açısını gösteren gaz kelebeği konum sensörü, hava sıcaklık sensörü ile birlikte gerekli bilgiyi sağlar.
Sıklıkla kullanılan bypass, darbe genişliği modülasyonlu yay yüklü bir solenoid valftir. Motor yönetim sistemi manyetik bobine bir PWM sinyali sağlar. Görev döngüsünü değiştirerek valf açılabilir, kapatılabilir veya aradaki herhangi bir konuma yerleştirilebilir. Baypas valfi ayrıca bir step motorla da donatılabilir.
Darbe genişliği modülasyonlu bypass solenoid valfı:
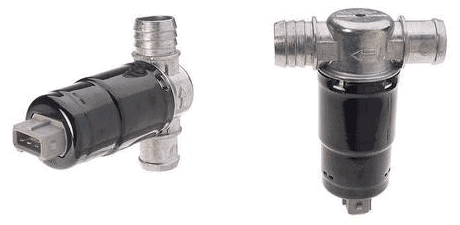
Şekilde PWM kontrollü bypass valfinin iki görünümü gösterilmektedir. Fiş bağlantısındaki üç pime bakılırsa bu genellikle iki bobinli bir versiyondur; biri vanayı açmak için, diğeri kapatmak için.
Aşağıdaki diyagram iki bobinin kontrol yöntemini göstermektedir. “EFI Ana Rölesi” (motor yönetim bilgisayarının rölesi) açıldığında, mikroişlemciye güç sağlanır. ECU'da iki transistör kontrol edilir.
Anahtarlama yöntemi, alt transistörün üst transistörün PWM sinyalini tersine çevirmesine olanak tanır. PWM sinyalleri yansıtılır. ISC1 ve ISC2'de (ECU'nun çıkışları) gördüğünüz şey budur. ECU her bobinin görev döngüsünü değiştirir. İki manyetik alan arasındaki güç farkı vananın konumunu belirler. Frekans 100 ila 250Hz arasındadır.
De görev döngüsü kontrolü osiloskopla ölçülebilir. Aşağıdaki resimde vana yarı açık durumdadır (görev hücresi %50). ISC1 ve ISC2'de pozitif ve negatif darbeler eşittir.
Darbe genişliği modülasyonlu yay yüklü bypass solenoid valfı:
İki bobinli aktüatörün yanı sıra genellikle tek bobinle de donatılır. Bu durumda fiş bağlantısında genellikle iki pin bulunur: PWM kontrolü ve topraklama kablosu için. Bir yay, valfin hareketsiz durumdayken kapalı olmasını sağlar; bu ikinci bobini gereksiz hale getirir.

Step motorla donatılmış baypas:
PWM kontrollü bypass valflerinin yanı sıra step motor vasıtasıyla ayarlanan valfler de bulunmaktadır. ECU bobinleri kontrol eder. Step motor sayfasına gitmek için buraya tıklayın.

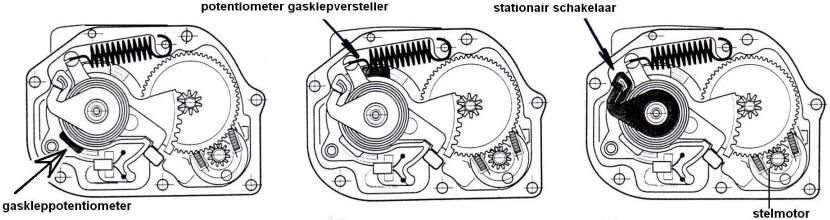
Aktüatörlü gaz kelebeği gövdesi:
Modern motor yönetim sistemleri, rölanti devrini dengelemek için gaz kelebeği konum kontrolünü kullanır. Artık ayrı bir baypas valfinin kullanılmasına gerek yoktur. Gaz kelebeği konum kontrolüne ait tüm bileşenler mahfazanın içinde bulunur. İki potansiyometreler tüm açısal dönüş boyunca gaz kelebeği valfinin konumunu kaydedin (görüntünün ortası). Rölantiyi (solda) kaydeden rölanti anahtarıyla birlikte sinyaller ECU'ya gönderilir. Gaz kelebeği valfindeki DC veya DC motor, gaz kelebeği valfinin konumunu kontrol etmek için bir PWM sinyali aracılığıyla kontrol edilir. Burada da bir step motorun gaz kelebeği valfını döndürmesi mümkündür.
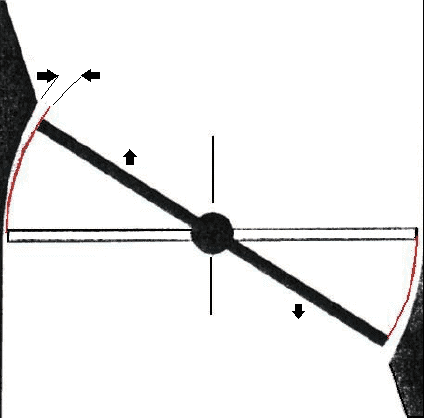
Gaz kelebeği gövdesinin içi, gaz kelebeği valfinin açısal hareketi ile hava boşluğunun doğrusal olarak artacağı şekilde değiştirilmiştir. Bu kulağa çok kesin geliyor. Bu nedenle, gaz kelebeği valfını değiştirdikten veya temizledikten sonra teşhis ekipmanı kullanılarak gaz kelebeği konumunun temel ayarlara sıfırlanması önemlidir.
Daha büyük motorlar için gaz kelebeği kontrolü:
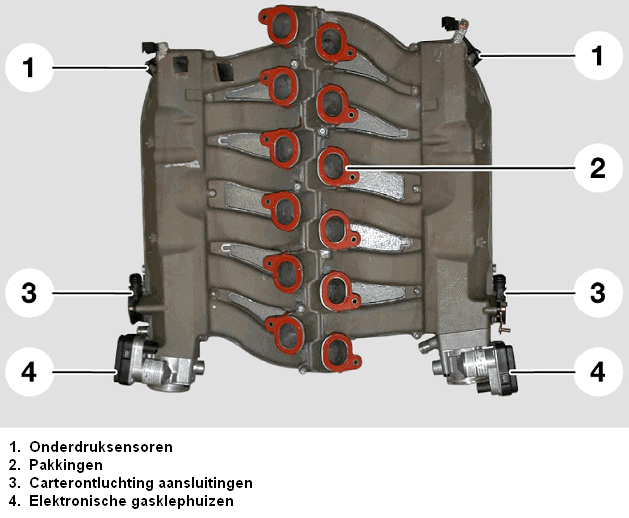
BMW'nin V12 motoru gibi büyük motorlarda (aşağıdaki resimde gösterilmektedir), bir gaz kelebeği valfinden gelen hava beslemesi çok küçüktür. Tam yükte motor o kadar çok havaya ihtiyaç duyar ki, tek bir gaz kelebeği valfinin çapı çok küçük olur. Bu nedenle iki gaz kelebeği gövdesi takıldı. Her silindir sırası için bir tane. Bu versiyonda iki hava filtresi yuvası, iki hava kütlesi ölçer ve iki emme borusu bulunur.
Gaz kelebeği konum sensörü:
Gaz kelebeği gövdesinin içinde bir gaz kelebeği konum sensörü Gaz kelebeği valfinin konumunu motor yönetim sisteminin ECU'suna ileten. Gaz kelebeğinin konumu emilen hava miktarını ve dolayısıyla enjekte edilecek yakıt miktarını da belirler. ECU, gaz kelebeği konumuna bağlı olarak rölanti devri kontrolünü çalışma koşullarına göre ayarlayabilir: motor soğukken veya klima açıkken, rölanti hızının biraz arttırılması gerekir, böylece gaz kelebeği valfi biraz daha açılmalıdır. Bölüme bakın: rölanti kontrolü.
Aşağıdaki şemada birbirine üç kabloyla bağlanan bir ECU ve bir potansiyometre görüyoruz. Potansiyometrenin gaz kelebeği valfına mekanik bir bağlantısı vardır. Gaz kelebeği valfinin bükülmesi koşucunun kaymasına neden olur.
- Pim 3'te potansiyometre 5 voltluk bir besleme voltajı alır;
- Potansiyometre pim 1'deki toprağa bağlanır;
- Potansiyometreden gelen sinyal pin 2 aracılığıyla ECU'ya gönderilir: silecek (ok) bu kabloya bağlanır.
Koşucunun karbon pistindeki konumu potansiyometre çıkış voltajını belirler. Koşucu sola doğru konumlandırıldığında çıkış voltajı yüksektir: akımın direnç boyunca yalnızca kısa bir mesafe kat etmesi gerekir, dolayısıyla daha az voltaj emilir. Koşucu sağa doğru ne kadar hareket ederse sinyal voltajı o kadar düşük olacaktır. Sayfada: potansiyometre Operasyon daha ayrıntılı olarak tartışılıyor.
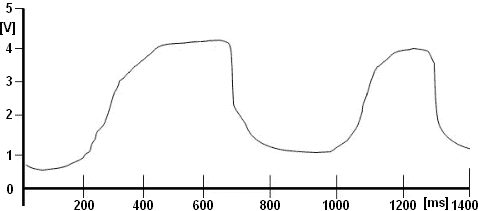
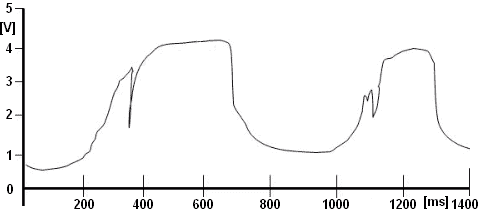
Bir multimetre ile besleme voltajının toprağa karşı değerini ölçebilirsiniz. Bu 5,0 voltluk stabilize bir voltaj olmalıdır. Sinyal voltajını bir osiloskopla ölçmek daha iyidir: AM sinyalinde multimetre ölçümüyle görülemeyen bozulmalar meydana gelebilir. Aşağıdaki iki çizimde doğru bir sinyal (düz çizgiler) ve parazitli bir sinyal gösterilmektedir; burada sinyal çok kısa bir süre içinde tuhaf bir voltaj düşüşü gösterir.
İngilizcede ve bazen Hollandaca edebiyatta da sıklıkla “TPS” kısaltmasının kullanıldığını görüyoruz. Bunun açılımı: "Gaz Kelebeği Konum Sensörü", Hollandaca "Gaz Kelebeği konum sensörü" kelimesinin bir çevirisidir.
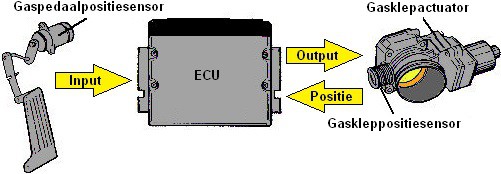
Elektronik gaz pedalı (tel ile gaz):
Günümüzde gaz kelebeği valfleri elektronik olarak kontrol ediliyor: artık gaz pedalı ile gaz kelebeği valfi arasında (mekanik) bir kablo bulamıyoruz. Gaz pedalının konumu iki konum sensörü tarafından kaydedilir ve motor yönetim sisteminin ECU'suna gönderilir. ECU, sinyalleri birbirleriyle karşılaştırarak bunların doğruluğunu kontrol eder ve valfin önceden belirlenmiş bir pozisyon almasını sağlamak için gaz kelebeği aktüatörünü (ayar motoru) kontrol eder. Biz buna Hollandaca'da "kabloyla gaz kelebeği" diyoruz: kabloyla gaz kelebeği kontrolü.

Gaz pedalı konum sensörleri, mahfazanın içine veya gaz pedalının üstüne monte edilir. Bu sensörlerden gelen sinyaller son derece doğru ve güvenilir olmalıdır: Sinyale herhangi bir müdahalenin hiçbir koşulda istenmeyen hızlanmaya veya motorun durmasına yol açmasını istemiyoruz. Güvenilirliği sağlamak için üreticiler iki tane takıyor konum sensörleri eklemek:
- Üreticiler her iki sensörden gelen sinyalleri farklı voltaj seviyelerinde iletmeyi seçebilirler. Sensör 1'in sinyal voltajı 1,2 volttan 1,6 volta çıktığında, sensör 2'nin sinyal voltajı da 400 mV artacaktır, ancak 2,2'den 2,6 volta;
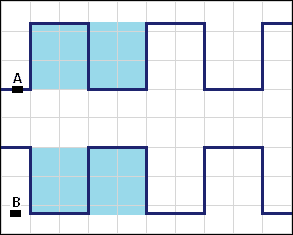
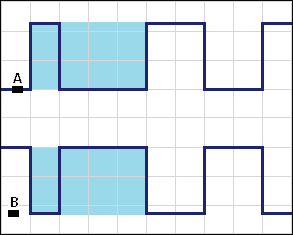
- Diğer bir seçenek de iki özdeş sinyali yansıtmaktır: Aşağıdaki kapsam görüntüsü bu stratejiyi göstermektedir. Gaz pedalına basıldığında A kanalındaki (mavi) sinyal 800 mV'den 2,9 volta çıkar ve B kanalındaki (kırmızı) sinyal 4,3'ten 2,2 volta düşer. Genliğin sinyal ilerlemesi (AM sinyali) tamamen aynıdır, ancak ayna görüntüsündedir.
İki sinyalden birinde arıza olduğunda: sinyal kısa süreliğine yere düştüğünde veya gürültü gösterdiğinde, her iki sinyalde de fark görülür. ECU daha sonra acil moda geçmeye karar verebilir: gaz pedalı konumu artık güvenilir değildir. Acil durum modunda, sınırlı bir güç mevcuttur ve bu da kişinin düşük hızda yol boyunca güvenli bir yere veya muhtemelen garaja gitmesine olanak tanır.
Gaz kelebeği bir tarafından kontrol edilir DC elektrik motoru açıldı ve kapandı. Gaz kelebeği ayar motoru bir kumanda tarafından kontrol edilir. H köprüsü kontrollü. Aktüatör, gaz pedalı gibi iki potansiyometreyle donatılmıştır. Aşağıdaki iki resimde iki çift potansiyometre seçeneğine sahip gaz kelebeği kontrol motoru (3) gösterilmektedir:
- Silecekleri yukarı bakan potansiyometreler: her iki sinyal de aynıdır, ancak farklı voltaj seviyesindedir;
- Koşucular birbirine zıt olan potansiyometreler: sinyaller ayna görüntüleridir. Gaz kelebeği açıldığında bir sinyal yükselirse diğer sinyal azalır.


Sayfa işlemi H köprüsü elektrik motorunun kontrol yöntemleri anlatılmıştır. Sayfada Potansiyometre Konum sensörünün çalışması ve ölçümü ayrıntılı olarak ele alınmıştır.