Mga Paksa:
- Panimula
- Prinsipyo ng pagtatrabaho ng mga de-koryenteng motor
- DC electric motor na may mga carbon brush
- DC electric motor na walang mga carbon brush
Panimula:
Nakahanap kami ng mga de-kuryenteng motor sa parami nang paraming lugar sa sasakyan. Sa isang de-koryenteng motor, ang isang electric current ay na-convert sa paggalaw at init. Nakahanap kami ng isang de-koryenteng motor sa salamin at pagsasaayos ng upuan, ngunit din bilang isang windshield wiper motor sa windshield wiper mechanism o bilang isang starter motor. Ang mga de-koryenteng motor na ito ay gumagana sa boltahe na 12 hanggang 14 volts. Sa pahinang ito nililimitahan namin ang aming sarili sa mga de-koryenteng motor sa loob at labas.
Ang mga de-koryenteng motor ay nagbibigay din ng (bahagyang) electric propulsion sa mga hybrid at ganap na electric na sasakyan. Ang ganitong uri ng de-koryenteng motor ay tinalakay sa pahina: Mga de-koryenteng motor ng HV.
Maaari naming hatiin ang DC electric motors sa:
- De-kuryenteng motor na may mga carbon brush (electromagnetic field at armature)
- Serye ng mga de-koryenteng motor;
- Parallel electric motors;
- Mga de-koryenteng motor na walang brush.
Prinsipyo ng pagpapatakbo ng mga de-koryenteng motor:
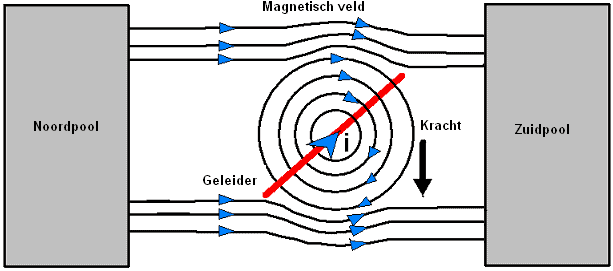
Sa isang de-koryenteng motor, ang isang electric current ay na-convert sa isang umiikot na paggalaw. Ang paggalaw ay sanhi ng dalawang magnetic pole na umaakit o nagtataboy sa isa't isa:
- Ang north pole at south pole ay umaakit sa isa't isa;
- Dalawang north pole ay nagtataboy sa isa't isa;
- Dalawang south pole ang nagtataboy sa isa't isa.
Ang magnet ay may north at south pole na may magkasalungat na singil. Kapag nasira ang magnet na iyon sa kalahati, hindi ka biglang magkakaroon ng dalawang magkahiwalay na poste, ngunit dalawang bagong magnet, parehong may north at south pole.
Maramihang mga magnetic pole (hilaga at timog) ay naayos sa pabahay. May magnetic field sa pagitan ng north at south pole. Ang output shaft (ang armature) ay umiikot dahil sa mga pagbabago sa magnetic field.
Sa isang de-koryenteng motor, ang dalawang pole ng parehong pangalan ay patuloy na inilalagay sa tapat ng bawat isa gamit ang (karaniwan) na permanenteng magnet, o kung hindi man ay mga electromagnet. Dahil ang mga poste ng parehong pangalan ay nagtataboy sa isa't isa, isang kilusan ang nilikha.
DC electric motor na may mga carbon brush:
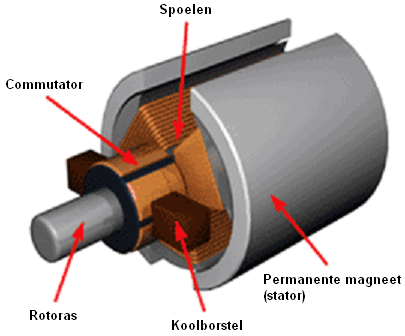
Halos lahat ng mga de-koryenteng motor sa teknolohiyang automotiko ay idinisenyo bilang mga DC motor na may mga permanenteng magnet at carbon brush. Sa ganitong uri ng mga de-koryenteng motor makikita natin ang mga sumusunod na magnet:
- Permanenteng magneto (isang north pole at isang south pole): may nakatigil na magnetic field sa pagitan nila;
- Coils: isang electromagnetic field ang nabuo dito. Ang umiikot na electromagnetic field ay nabuo sa mga coils.
Ang mga permanenteng magnet ay matatagpuan sa kaliwa at kanan ng rotor at binubuo ng isang north pole at isang south pole. Sa pagitan ng north at south pole na ito ay may nakatigil na magnetic field na hindi nagbabago kapag ang de-koryenteng motor ay gumagana o nakatigil.
Ang isang umiikot na electromagnetic field ay nabuo sa mga coils sa sandaling ang kasalukuyang daloy sa pamamagitan ng mga ito. Ang kasalukuyang ay ibinibigay at inalis ng mga carbon brush sa pamamagitan ng commutator.
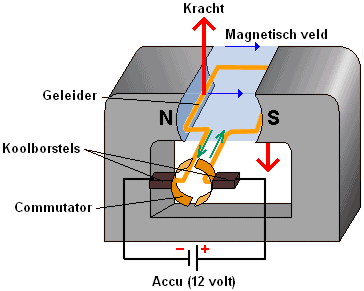
Ang pagbaligtad sa kasalukuyang direksyon ay ginagawa sa pamamagitan ng commutation: dalawang carbon brushes ang nag-drag sa ibabaw ng commutator, na binubuo ng plus at minus side. Ang carbon brush sa plus side ay nagdadala ng kasalukuyang sa konduktor (berdeng mga arrow sa figure). Ang kasalukuyang umaalis sa konduktor sa pamamagitan ng carbon brush sa negatibong bahagi. Ang kasalukuyang dumadaloy sa conductor ay lumilikha ng electromagnetic field.
Ang isang puwersa ay nilikha sa pagitan ng nagresultang magnetism sa armature (ang conductor) at ang field (ang permanenteng magnet) (mga pulang arrow sa imahe). Ang puwersang ito ay nagiging sanhi ng pag-ikot ng armature at commutator sa kanilang axis. Ang mga carbon brush ay tumama sa kabilang bahagi ng commutator, na binabaligtad ang direksyon ng kasalukuyang sa armature. Ang magnetic field at ang puwersa ay binuo sa parehong direksyon, upang ang armature ay umiikot muli sa paligid ng axis nito.
Mababago natin ang direksyon ng pag-ikot ng de-koryenteng motor (basahin: ang armature) sa pamamagitan ng pag-reverse ng plus at minus ng mga carbon brush.
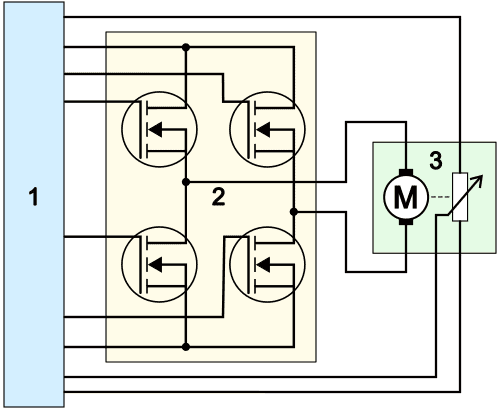
Ang pagpapalitan ng plus at minus ay maaaring makamit sa pamamagitan ng isang H-bridge.
- Ang ECU (1) ay sabay na kinokontrol ang dalawa sa apat na transistor o FET (4);
- Ang mga FET (2) ay nagbibigay sa electric motor (3) ng plus at ground. Depende kung aling dalawang FET ang naka-on, ang itaas na carbon brush ay positibo at ang ibaba ay dinurog, o kabaliktaran;
- Ang potentiometer sa tabi ng de-koryenteng motor ay nagrerehistro ng posisyon at direksyon ng pag-ikot. Hindi lahat ng mga de-koryenteng motor ay nilagyan ng potentiometer.
Tingnan ang pahina H-tulay para sa mga posibleng disenyo at paraan ng paglipat ng H-bridge.
DC electric motor na walang mga carbon brush:
Ang brushless direct current (DC) motor ay isang kasabay na motor. Pinalitan ng electrical control ang mga carbon brush. Ang ganitong uri ng de-koryenteng motor ay halos kapareho sa kasabay na AC motor na may mga permanenteng magnet, gaya ng ginamit sa powertrain ng mga de-kuryenteng sasakyan. Ang pangunahing pagkakaiba sa pagitan ng dalawang motor ay ang kontrol: ang AC motor ay kinokontrol gamit ang isang modulated sinusoidal alternating voltage at ang DC motor na may square wave voltage.
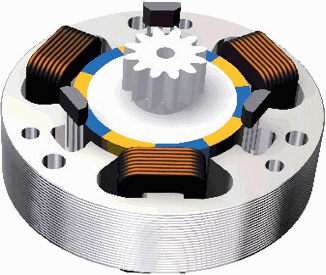
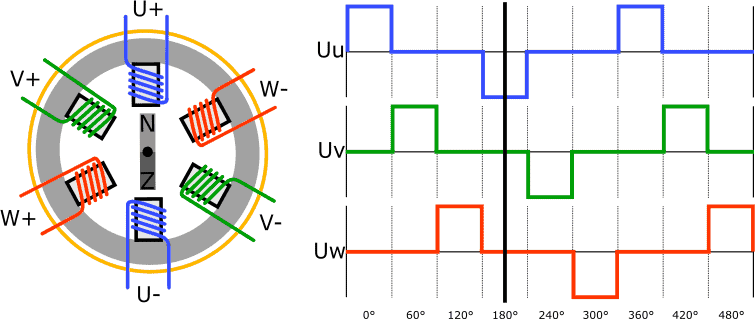
Ang stator ay madalas na naglalaman ng tatlo o anim na coils (U, V at W) at ang rotor ay isang permanenteng magnet. Ang imahe sa ibaba ay nagpapakita ng eskematiko na istraktura ng DC motor na may pag-unlad ng boltahe sa tatlong coils. Sa katotohanan, maraming mga Hall sensor ang naka-install sa pagitan ng mga pole upang matukoy ang posisyon ng rotor.
Tinutukoy ng control unit kung aling mga coils ang dapat nitong kontrolin batay sa posisyon ng rotor.
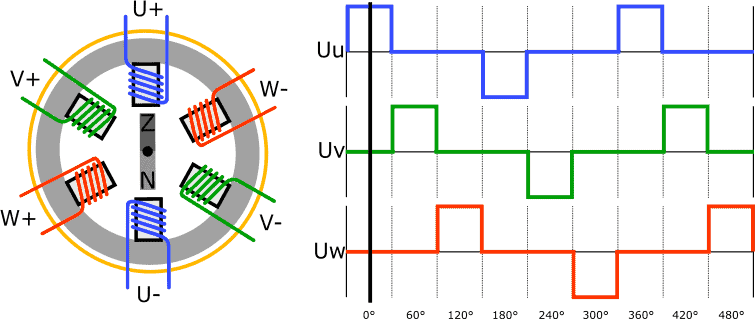
Sa sumusunod na larawan ang U+ coil ay pinalakas. Ang paraan ng pag-ikot ng coil sa paligid ng poste ay tumutukoy kung ito ay magiging north o south pole. Sa halimbawang ito, ang U+ ay ang north pole at ang U- ay ang south pole.
Ang rotor ay idinisenyo bilang isang permanenteng magnet. Tulad ng inilarawan sa mga nakaraang talata, ang rotor ay pumuwesto o umiikot bilang resulta ng pagbabago ng magnetic field sa pamamagitan ng mga coils.
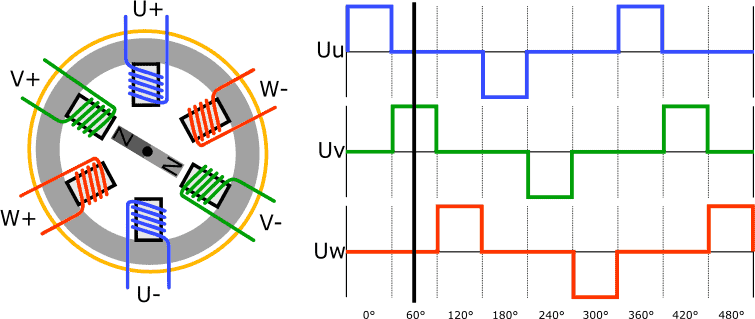
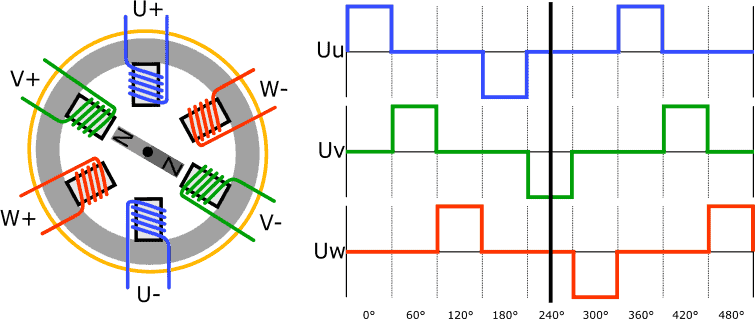
Upang paikutin ang rotor counterclockwise mula sa posisyon na ipinapakita sa nakaraang figure, ang V-coils ay energized.
Ang V+ ay nagiging north pole, V- ang south pole. Ang permanenteng magnet rotor ay umiikot;
ang hilaga at timog pole ay umaakit sa isa't isa, gayundin ang timog at hilaga na pole sa kabilang panig ng magnet.
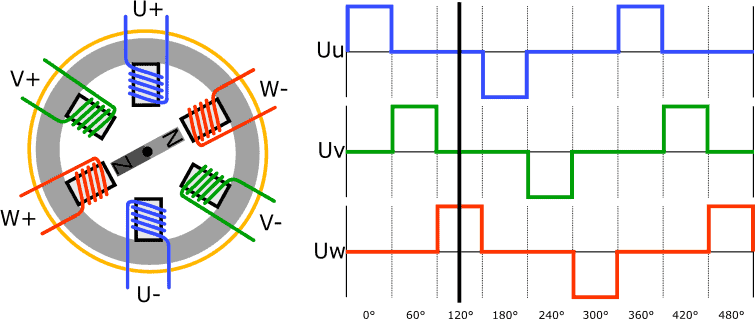
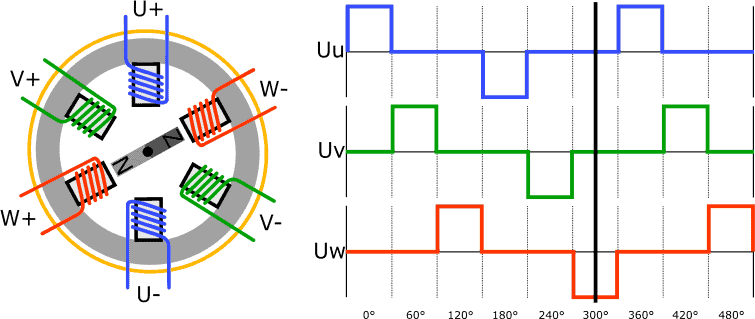
Ngayon ang W coils ay pinalakas upang paikutin ang rotor ng isa pang 60 degrees.
Ang W+ coil ay nagiging north pole at W- ang south pole. Ang rotor ay umiikot at kinuha ang bagong posisyon nito.
Ang rotor sa susunod na imahe ay umikot ng 180 degrees mula noong unang sitwasyon; sa unang larawan ang timog na poste ay nakaturo paitaas; ngayon ay ang North Pole.
Ang polarity ng U+ coil at ang U-coil ay nabaligtad, na nagiging sanhi ng pag-agos ng kasalukuyang sa pamamagitan ng mga coil nang pabaligtad. Ginagawa nitong ang U+ ay isang south pole at ang U- isang north pole.
Ang rotor na may permanenteng magnet ay pinaikot pa sa pamamagitan ng pagbabago sa magnetic field.
Upang paikutin ang rotor ng 60 degrees muli, ang V- ay ginawang north pole at ang V+ ay south pole. Ang rotor ay tumatagal ng bagong posisyon.
Muli ang rotor ay lumiliko 60 degrees bilang isang resulta ng isang pagbabago sa magnetic field sa mga coils:
Ang W- coil ay ang north pole at ang W+ ay ang south pole.
Sa anim na sitwasyong inilarawan sa itaas, ang dalawang coils ay patuloy na pinapagana sa parehong oras. Madalas din kaming makakita ng mga brushless DC na motor na may tatlong coils sa halip na anim. Sa tatlong coils, ang U, V at W coils ay pinalakas din ng sunud-sunod, ngunit walang pagbabago sa polarity.
Ang brushless DC motor ay isang malakas na motor na angkop para sa mga application kung saan ang mataas na torque ay kinakailangan para sa parehong start-up, katamtamang bilis at mataas na bilis. Ang brushless DC motor at ang stepper motor ay madalas na nalilito. Ito ay hindi nakakagulat, dahil ang operasyon at kontrol ng mga motor ay may maraming pagkakatulad: ang parehong mga motor ay hinihimok sa pamamagitan ng paglikha ng isang magnetic field sa pagitan ng mga coils at ang rotor na may permanenteng magnet. Gayunpaman, bilang karagdagan sa terminolohiya, ang parehong mga makina ay may makabuluhang pagkakaiba, pangunahin sa aplikasyon at samakatuwid ang pagpili ng mga materyales.
Ang stepper motor ay karaniwang isang brushless DC motor, ngunit ito ay inilapat sa ibang larangan. Kung saan ang DC motor ay pangunahing ginagamit para sa pangmatagalang pagpapatakbo sa mataas na bilis, nakikita namin ang stepper motor sa mga application kung saan ang isang pagsasaayos sa isang eksaktong posisyon ay ang pinakamahalaga.
Ang ipinapakitang DC motor ay kinokontrol bawat 60° na pag-ikot ng rotor. Ito ay posibleng mabawasan sa 30° kung pasiglahin natin ang apat na coil nang sabay-sabay sa pagitan ng bawat kontrol, kaya nakakakuha ng isang intermediate na posisyon. Gayunpaman, ang isang stepper motor ay may kakayahang mag-adjust ng mga pagtaas ng 1,8° hanggang 0,9°. Ito ay higit pang nagpapakita na ang stepper motor ay angkop para sa napakatumpak na mga posisyon.
Ang iba't ibang mga bersyon, ang mga paraan ng kontrol ng ECU at ang mga application ay matatagpuan sa pahina stepper motor.

Mga kaugnay na pahina: