Oblicz redukcję 5. biegu (zgodnie z szeregiem geometrycznym)
Obliczanie pozostałych redukcji (zgodnie z szeregiem geometrycznym)
Oblicz redukcje na podstawie skorygowanego szeregu geometrycznego (szereg Jantego)
Oblicz prędkość pojazdu na redukcję (szereg geometryczny)
Oblicz prędkość pojazdu na redukcję (skorygowany szereg geometryczny)
Wprowadzenie do przełożeń: Przełożenie skrzyni biegów jest określane przez:
Liczba zębów kół zębatych (takich jak skrzynia biegów)
Średnica kół pasowych (takich jak elementy napędzane paskiem wielopasmowym)
Rysunek pokazuje, że koło zębate A ma 20 zębów, a koło B ma 40 zębów. Stosunek wynosi 40/20 = 2:1. Oznacza to, że koło zębate A (napędzane) wykonuje dwa obroty, podczas gdy koło B wykonuje jeden obrót. W praktyce nigdy tak nie jest. Zawsze zapewniony jest stosunek, który nigdy nie wynosi dokładnie 2,00:1, ponieważ w tym drugim przypadku przy każdym obrocie zazębiają się te same zęby. Gdyby koło zębate B miało 39 zębów (1,95:1) lub 41 zębów (2,05:1), koła zębate A i B zazębiałyby się o jeden ząb dalej z każdym obrotem, co skutkowałoby 20 razy mniejszym zużyciem niż przy stosunku 2:1.
Wysokie przełożenie (gdzie przełożenie napędowe jest małe, a koło napędzane jest duże) zapewnia wysoką prędkość maksymalną, a niskie przełożenie zapewnia większą siłę uciągu. W skrzyni biegów samochodu (w zasadzie wszystkich pojazdów mechanicznych) projekt uwzględnia cele, do jakich samochód będzie używany. Samochód przeznaczony głównie do transportu ciężkich ładunków będzie potrzebował większej siły uciągu na niskich biegach niż samochód sportowy, który musi być w stanie osiągnąć dużą prędkość maksymalną. Przełożenie najwyższego biegu musi być tak skonstruowane, aby przy maksymalnej mocy silnika można było osiągnąć maksymalne obroty silnika. Szkoda by było, gdyby prędkość była już bliska limitu i pozostało jeszcze wystarczająco dużo mocy, aby dalej przyspieszać. Oprócz najwyższego biegu należy również ostrożnie wybrać najniższy bieg; samochód musi być w stanie bez problemu odjechać na pierwszym biegu na wzniesieniu o nachyleniu 40% w najgorszych warunkach. Dodatkowo pomiędzy nimi należy ustalić przełożenia biegów pośrednich czyli 2, 3 i 4 (ewentualnie także 5 jeśli chodzi o skrzynię 6-biegową).
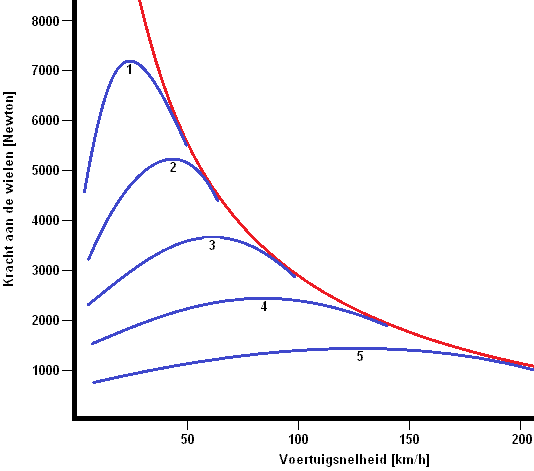
Moc na koła Na wykresie (na obrazku) charakterystyka silnika jest oznaczona liniami niebieskimi, a charakterystyka pojazdu linią czerwoną. Tutaj wyraźnie widać, że 1. bieg przekazuje na koła dużą siłę (około 7200N, czyli 7,2kN), a najwyższy bieg (5.) dostarcza na koła siłę maksymalnie 1500N. Wraz ze wzrostem prędkości i przyspieszenia pojazdu siła przekazywana na koła maleje. Przebieg niebieskich linii wynika z przełożeń skrzyni biegów, a nachylona czerwona linia jest wynikiem oporów jazdy (oporów toczenia i powietrza).
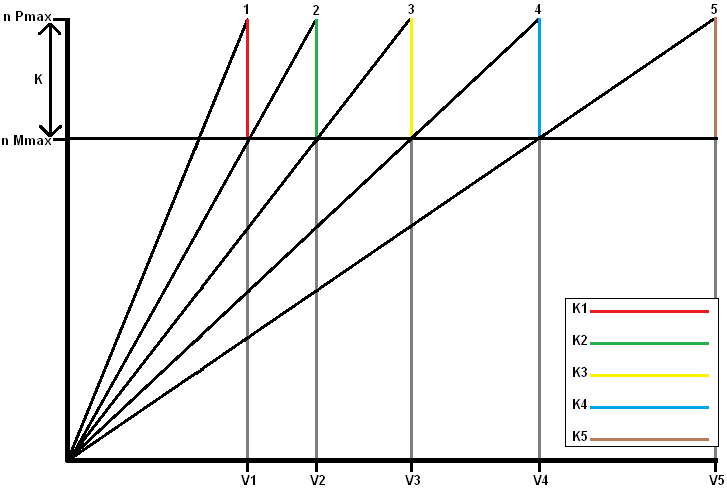
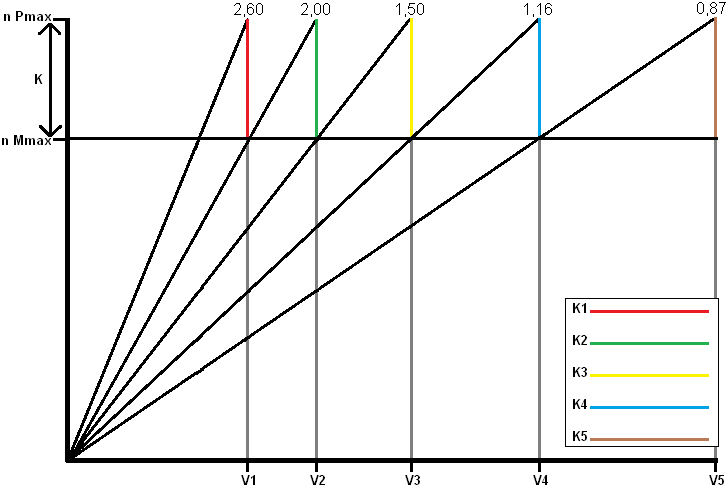
Określ współczynnik K zgodnie z szeregiem geometrycznym: Poniższy tekst odnosi się do poniższego diagramu zębów piłokształtnych.
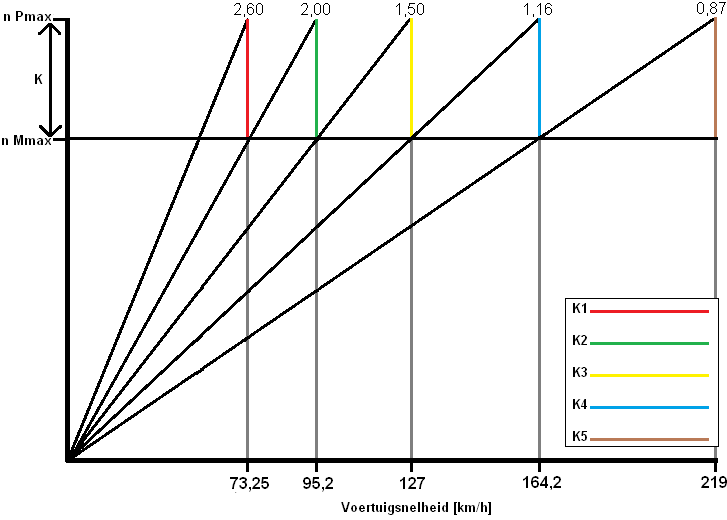
Jeżeli na pierwszym biegu przyspieszysz do maksymalnej prędkości obrotowej silnika, musisz przełączyć na drugi bieg. Po zmianie biegu i wyłączeniu prędkość obrotowa silnika spadnie, a prędkość pojazdu pozostanie taka sama. Podczas zmiany biegu z 1. na 2. prędkość obrotowa silnika jest zgodna z czerwoną linią na poniższym wykresie. Prędkość obrotowa silnika spadnie z „n Pmax” do „n Mmax”. Kolorowe linie przedstawiają współczynnik K. Rozmiar współczynnika K określa rozmiar kolorowych linii. Jeżeli „n Mmax” i „n Pmax” są blisko siebie, współczynnik K jest mały. Dlatego przerwy między przekładniami są mniejsze. Działa to w ten sam sposób z innymi biegami. Jeśli przyspieszysz do „n Pmax” z 2. biegu (do V2), podczas zmiany biegu zielona linia będzie podążać do „n Mmax”.
n Pmax: Prędkość obrotowa silnika, przy której osiągana jest maksymalna moc (np. 6000 obr./min), gdzie „n Pmax” oznacza „prędkość przy maksymalnej mocy”
n Mmax: Prędkość obrotowa silnika, przy której osiągany jest maksymalny moment obrotowy (np. 4000 obr/min), gdzie „n Mmax” oznacza „prędkość przy maksymalnym momencie obrotowym”
Stosunki prędkości i przełożeń pozostają takie same. Dlatego wszystkie kolorowe linie (K1 do K5) pozostają takie same. Współczynnik K zależy od charakterystyki silnika. Współczynnik K leży pomiędzy prędkościami obrotowymi silnika maksymalnego momentu obrotowego i maksymalną mocą silnika. Dlatego przełożenia skrzyni biegów są obliczane na podstawie tej charakterystyki silnika. Współczynnik K można wyznaczyć dla szeregu geometrycznego w następujący sposób: K = n Pmax / n Mmax K = 6000 / 4000 K = 1,5
Współczynnik K wynoszący 1,5 określa redukcje (przekładnie) wszystkich biegów. Wszystko to jest ze sobą skoordynowane. Seria geometryczna nie jest stosowana w samochodach osobowych ze względu na duże luzy na wyższych biegach. Skrzynie biegów samochodów osobowych projektuje się według skorygowanego szeregu geometrycznego (szereg Jante).
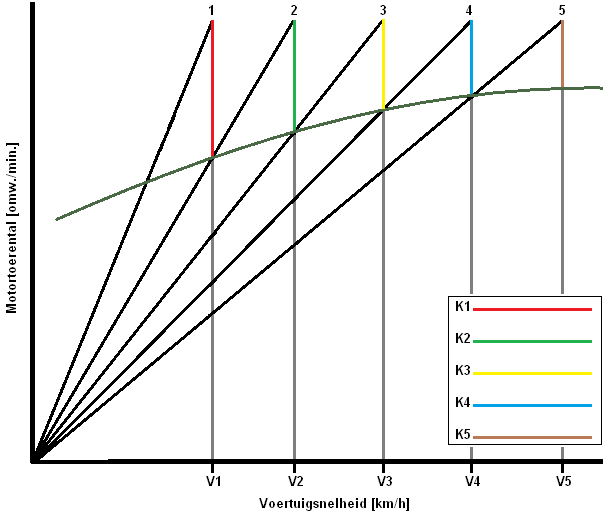
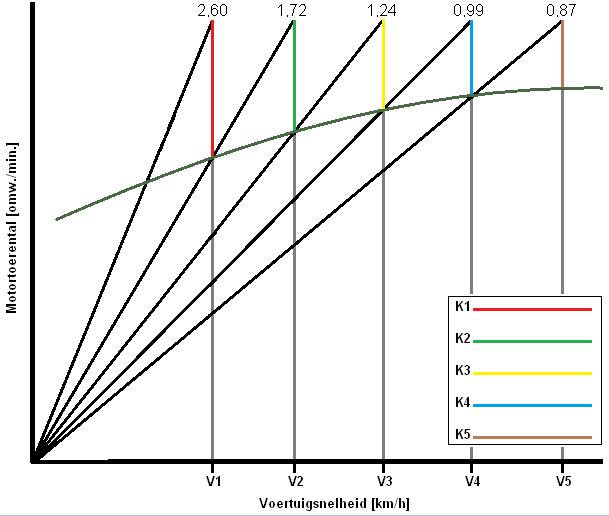
Wyznacz współczynnik K na podstawie skorygowanego szeregu geometrycznego (szereg Jantego): W samochodach osobowych odstępy między niższymi biegami są często duże i zmniejszają się wraz z wyższymi biegami. Małe przerwy pomiędzy wysokimi biegami powodują niewielką utratę przyspieszenia. Przełożenia na wyższych biegach stają się coraz mniejsze, co pozwala na maksymalne wykorzystanie mocy silnika. Możesz to również zauważyć; Prędkość obrotowa silnika spada bardziej przy przełączaniu z 1. na 2. bieg niż przy przełączaniu z 3. na 4. bieg. Widać to na poniższym schemacie zębów piłokształtnych; czerwona linia jest większa niż żółta linia:
Szereg arytmetyczny nazywany jest także „szeregem Jantego”. Jest to poprawiony szereg geometryczny. Współczynnik K jest różny dla wszystkich biegów. Ma to istotne zalety w porównaniu do wyżej wymienionych szeregów geometrycznych ze stałą wartością K. Ponieważ przełożenia na wyższych biegach stają się mniejsze, wykorzystywana jest maksymalna moc silnika. Siła działająca na koła jest teraz większa niż w szeregu geometrycznym. Współczynnik K jest teraz inny dla każdego biegu (wszystkie kolorowe linie mają inną długość), więc teraz wszystko należy określić na podstawie obliczeń. Przełożenia przekładni można określić za pomocą współczynnika K. Nie znając współczynnika K, można określić redukcję najniższego lub najwyższego biegu, ale pozostałe przyspieszenia należy następnie obliczyć na podstawie współczynnika K. Dopiero wtedy można narysować diagram piły.
Wyznaczanie przełożeń skrzyni biegów (wprowadzenie): Producent skrzyni biegów musi wziąć pod uwagę wiele rzeczy. Przekładnie w skrzyni biegów należy montować ostrożnie. Ważne są na przykład takie czynniki, jak prędkości, przy których silnik ma największy moment obrotowy i moc, dynamiczny promień opony, redukcja mechanizmu różnicowego i wydajność całego układu napędowego. Poniżej znajduje się lista:
Prędkości, przy których silnik ma największy moment obrotowy i moc: Są to prędkości „n Pmax” i „n Mmax” pokazane na powyższej ilustracji szeregu geometrycznego.
Dynamiczny promień opony: Jest to odległość pomiędzy środkiem piasty a powierzchnią drogi. Im mniejsze koło, tym większa będzie prędkość koła przy tej samej prędkości pojazdu. Promień dynamiczny opony można obliczyć w następujący sposób (jeśli jest już znany): Aby to obliczyć, należy znać rozmiar opony. Jako przykład weźmy rozmiar opony 205/55R16. Oznacza to, że opona ma (205 x 0,55) = 112,75 mm = 11,28 cm wysokości. Ponieważ wynosi 16 cali, należy to przeliczyć na centymetry: 16 x 2,54 (cale) = 40,64 cm. Dotyczy to odległości nawierzchni drogi od piasty, dlatego całkowitą wysokość 40,64 cm należy podzielić przez 2: 40,64 / 2 = 20,32 cm. Promień dynamiczny opony (Rdyn) wynosi teraz: 11,28 + 20,32 = 31,60 cm.
Zmniejszenie różnicy: Mechanizm różnicowy ma zawsze stałe przełożenie. Skrzynia biegów musi być do tego dostosowana. Pojazdy użytkowe mogą posiadać do 5 mechanizmów różnicowych w napędzie.
Sprawność całego układu napędowego: Między innymi ze względu na straty spowodowane tarciem zawsze występuje pewna strata procentowa. Zależy to również od gęstości oleju (i temperatury). Zwykle zwrot wynosi około 85 do 90%.
Teraz ustalimy przełożenia (redukcje) fikcyjnego silnika i skrzyni biegów.
Znane są następujące specyfikacje:
Masa pojazdu: 1500kg
Przyspieszenie upadku (G): 9,81 m/s2
Typ skrzyni biegów: Ręczna z 5 biegami i biegiem wstecznym
Promień dynamiczny opony: 0,32 m (= 31,60 cm z poprzedniego obliczenia)
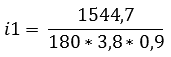
Redukcja różnicy: 3,8:1
Sprawność układu napędowego: 90%
Maksymalna prędkość pojazdu: 220 km/h (220 / 3,6 = 61,1 m/s)
Maksymalne nachylenie: 20%
Współczynnik oporu toczenia (μ): 0,020
n Pmax: 100 kW przy 6500 obr./min
n Mmax: 180 Nm przy 4500 obr./min
Najpierw należy określić, jaki moment obrotowy koła mogą przenieść na nawierzchnię drogi. Zależy to od stanu pojazdu, bo czy porusza się po drodze asfaltowej o niskim współczynniku oporów toczenia? Można to obliczyć łącznie z oporem toczenia i dynamicznym promieniem opony. Wzór na opór toczenia jest następujący: Frol = μ xmxgx cos α (wyjaśnienie znajdziesz na stronie opory jazdy) Frol = 0,020 x 1500 x 9,81 x cos 18 = 279,9 N
Ponieważ istnieje nachylenie, należy również obliczyć nachylenie F: F nachylenie = mxgx sin α F nachylenie = 1500 x 9,81 x sin 18 = 4547,2 N
Opór powietrza można pominąć, zatem całkowity opór jazdy jest następujący: Frij = Frol + Fslope Piątek = 279,9 + 4547,2 = 4827,1N
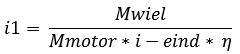
Aby obliczyć maksymalny moment obrotowy, jaki koła mogą przenieść na nawierzchnię, należy pomnożyć Frij przez dynamiczny promień opony Mwiel = Frij x Rdyn Koło M = 4827,1 x 0,32 Mkoło = 1544,7 Nm
Współczynnik K: Teraz obliczymy współczynnik K: K = n Pmax / n Mmax K = 6000 / 4500 K = 1,33
Oblicz redukcję 1. biegu: Wzór na obliczenie pierwszego biegu jest następujący:
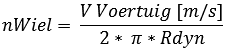
Oblicz redukcję 5. biegu (wg ciągu geometrycznego): W podobny sposób można również określić redukcję 5. biegu. Bieg 5 należy dobrać na podstawie maksymalnych obrotów silnika, gdyż byłoby to irytujące, gdyby silnik miał jeszcze wystarczającą moc do dalszego przyspieszania po osiągnięciu maksymalnych obrotów silnika (a co za tym idzie prędkości maksymalnej samochodu). Ważna jest także prędkość koła (nWheel) przy maksymalnej prędkości pojazdu. Najpierw należy to obliczyć:
Znając prędkość koła przy maksymalnej prędkości pojazdu wynoszącej 220 km/h (61,1 m/s), można obliczyć redukcję 5. biegu.
Obliczanie pozostałych redukcji (wg ciągu geometrycznego): Z obliczeń wynika, że redukcja 5. biegu wynosi 0,87, a współczynnik K = 1,33. Na podstawie tych danych (zgodnie z szeregiem geometrycznym) można obliczyć redukcje 2., 3. i 4. biegu.
i5 = (został już wcześniej obliczony) i4 = K x i5 i3 = K x i4 i2 = K x i3 i1 = K x i2
Redukcja i1 jest już tutaj znana, więc jeśli reszta zostanie poprawnie obliczona, powinna wyniknąć ta sama liczba (czyli 2,51). Niewielkie odchylenie jest normalne, ponieważ w międzyczasie dokonano wielu zaokrągleń. Teraz można wypełnić rząd wszystkich redukcji. Obliczenia należy wykonywać od góry do dołu. Odpowiedź i5 jest używana dla i4, a i4 dla i3 itd.
i5 = 0,87 i4 = 1,33 x 0,87 = 1,16 i3 = 1,33 x 1,16 = 1,50 i2 = 1,33 x 1,50 = 2,00 i1 = 1,33 x 2,00 = 2,60
Można teraz ukończyć tabelę szeregów geometrycznych.
Obliczanie redukcji na podstawie skorygowanego szeregu geometrycznego (szereg Jantego): Wcześniej na stronie wyjaśniono różnicę pomiędzy szeregiem geometrycznym a „poprawionym” szeregiem geometrycznym. Skorygowany szereg geometryczny, zwany także „szeregem Jante”, ma tę zaletę, że współczynnik K przy wyższych redukcjach jest bliżej siebie. Współczynnik K dla szeregu geometrycznego był stały (było to n Pmax podzielone przez n Mmax i wynosiło 1,33). Dało to również stałą wartość na wykresie. Przy skorygowanym szeregu geometrycznym na wykresie pojawia się linia wskazująca, że wartość K nie jest stała. Współczynnik K maleje wraz z każdym przyspieszeniem. Skorygowany szereg geometryczny ma stałą wartość. Oznaczamy to za pomocą m. Wartość m = 1,1.
Ogólny wzór na wartość K skorygowanego szeregu geometrycznego jest następujący:
Wyjaśnienie wzoru: z-1 = liczba biegów minus jeden i1 = redukcja pierwszego biegu m do szóstej potęgi = stała do szóstej iz = całkowita liczba biegów
Wypełnione daje czwarty pierwiastek z 2,6 / (1,1^6 x 0,87) (Wprowadź pierwiastek kwadratowy do kalkulatora w następujący sposób: najpierw wprowadź 4, następnie SHIFT, a następnie znak pierwiastka z x nad nim. Następnie mnożenie wpisz pod linią podziału w nawiasach).
Odpowiedź brzmi: 1,14
Wartość K skorygowanego szeregu geometrycznego wynosi zatem 1,14. Obliczymy to dalej:
i5 = (poprzednio obliczone) i4 = K x i5 i3 = K2 xmx i5 i2 = K3 x m3 x i5 i1 = K4 x m6 x i5
i5 jest znane; jest to mianowicie 0,87. Wartość K wynosi 1,14, a m wynosi 1,1. Dzięki tym danym możemy wypełnić tabelę:
ja5 = 0,87 i4 = 1,14 x 0,87 i3 = 1,142 x 1,1 x i5 i2 = 1,143 x 1,13 x i5 i1 = 1,144 x 1,16 x i5
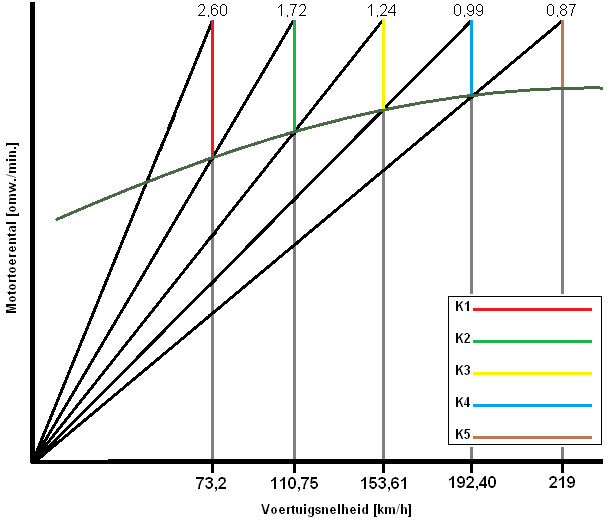
i5 = 0,87 i4 = 0,99 i3 = 1,24 i2 = 1,72 i1 = 2,60
Można teraz uzupełnić tabelę poprawionego szeregu geometrycznego:
Oblicz prędkość pojazdu na redukcję (szereg geometryczny): Dla każdego ograniczenia można określić prędkość pojazdu. Jest to maksymalna prędkość jaką pojazd może osiągnąć na tym biegu przy maksymalnej prędkości 6000 obrotów na minutę. Obliczenie jest następujące:
Vpojazd 1. redukcja = 2 x π x nKoło x Rdyn (Właśnie obliczono nKoło dla pierwszego biegu i Rdyn było już znane; wynosi ono 0,32m. Można wówczas wpisać wzór:
Vpojazd 1. redukcja = 2 x π x 10,12 x 0,32 Vpojazd 1-sza redukcja = 20,35 m/sx 3,6 = 73,25 km / h.
Pozostałe przyspieszenia można po prostu obliczyć, zmieniając Z = 2,60 w pierwszym wzorze na redukcję pożądanego przyspieszenia, a następnie wpisując to jako nWheel w drugim wzorze. Pozostałe biegi mają następujący wynik:
2. bieg: 95,2 km / h. 3. bieg: 127 km / h. 4. bieg: 164,2 km / h. 5. bieg: 219 km / h. (jest to maksymalna prędkość samochodu)
Prędkości te można wpisać do tabeli szeregu geometrycznego.
Oblicz prędkość pojazdu na redukcję (skorygowany szereg geometryczny): Obliczenia są dokładnie takie same i dlatego nie są już odnotowywane.
1. bieg: 73,2 km/h 2. bieg: 110,75 km/h 3. bieg: 153,61 km/h 4. bieg: 192,40 km/h 5. bieg: 219 km/h
Jak teraz wyraźnie widać, prędkości maksymalne samochodu są takie same dla szeregu geometrycznego i skorygowanego szeregu geometrycznego. W szeregu geometrycznym (pierwszym) odstępy pomiędzy wyższymi biegami są bardzo duże, natomiast w poprawionym szeregu geometrycznym odstępy pomiędzy wszystkimi biegami są prawie takie same. Ten ostatni jest stosowany w dzisiejszych pojazdach.