Konwersja napięć czujników analogowych na komunikat cyfrowy
Konwersja sygnału generatora impulsów na wiadomość cyfrową
Sygnały wyjściowe
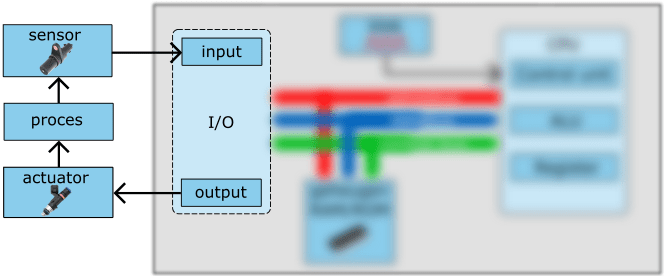
Przedmowa: W większości przypadków sygnały elektryczne z czujników muszą zostać dostosowane przed przesłaniem ich do procesora. Siłowniki są sterowane po drugiej stronie komputera. Są to często obwody indukcyjne, które często przełączają duże prądy. Sprzęt regulujący sygnały czujników i prądy elementów wykonawczych nazywany jest obwodami interfejsu. Obwód interfejsu zapewnia konwersję napięcia analogowego na cyfrowe.
czujniki przesyłać napięcie o niskim natężeniu. Obwód interfejsu przetwarza napięcie na wartość cyfrową (0 lub 1). Natężenie prądu jest niskie przy sygnale czujnika;
Siłowniki wymagają większego prądu. Do siłowniki sterujące, znajdują się w ECU w postaci (kombinacji) tranzystorów lub tranzystorów FET, zwanych także „sterownikami”. Omówimy to bardziej szczegółowo w części „Sygnały wyjściowe”.
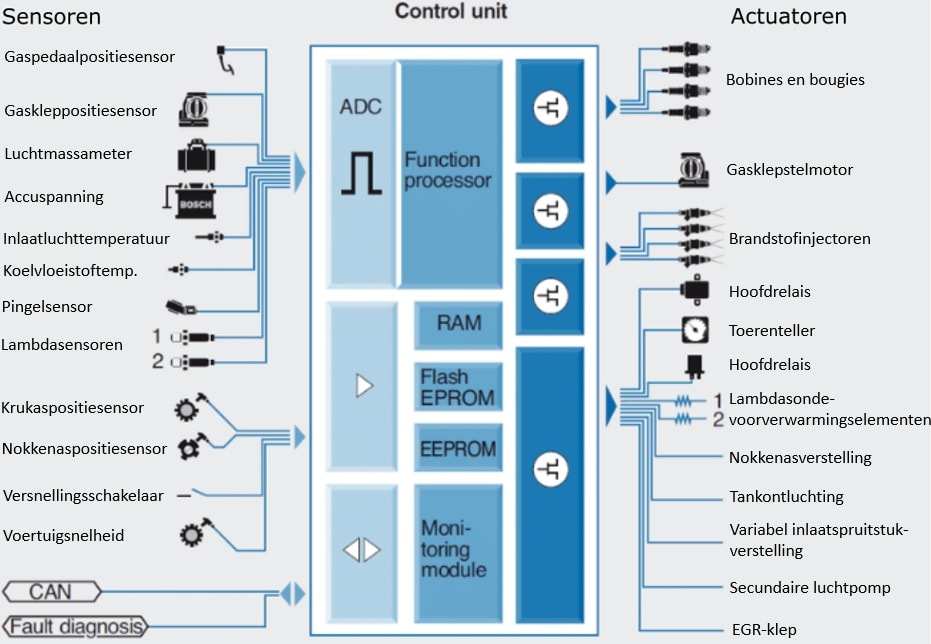
Poniższy rysunek przedstawia czujniki i elementy wykonawcze układu zarządzania silnikiem (benzynowym). Najwyższa grupa czujników (od czujnika położenia pedału przyspieszenia po sondy lambda) należy do kategorii „analogowej”. Oznacza to, że wejściowe napięcia czujnika muszą być najpierw przetworzone na postać cyfrową w przetworniku ADC (przetworniku analogowo-cyfrowym). Dolna grupa czujników (od czujnika położenia wału korbowego do czujnika prędkości pojazdu) już dostarcza swój sygnał w formie cyfrowej. Sygnały włączenia lub napięcia bloku są podawane bezpośrednio do procesora.
Siłowniki po prawej stronie są sterowane przez stopień wyjściowy. Stopień wyjściowy, zwany także sterownikiem, składa się z obwodu kilku tranzystorów generujących użyteczne napięcie i prąd z impulsu sterującego z komputera sterującego siłownikiem.
System zarządzania silnikiem z czujnikami (po lewej) i siłownikami (po prawej)
Logika tranzystorowo-tranzystorowa (TTL): Procesor pracuje z napięciem 5 woltów. Napięcia wejściowe i wyjściowe są zatem ograniczone do zakresu od 0 do 5 woltów (poziom TTL, w skrócie Transistor Transistor Logic). W przypadku sygnałów odbiegających od tego poziomu napięcia następuje regulacja w obwodzie interfejsu.
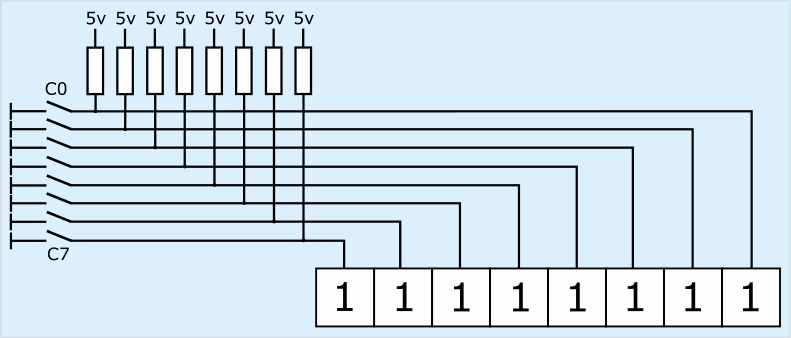
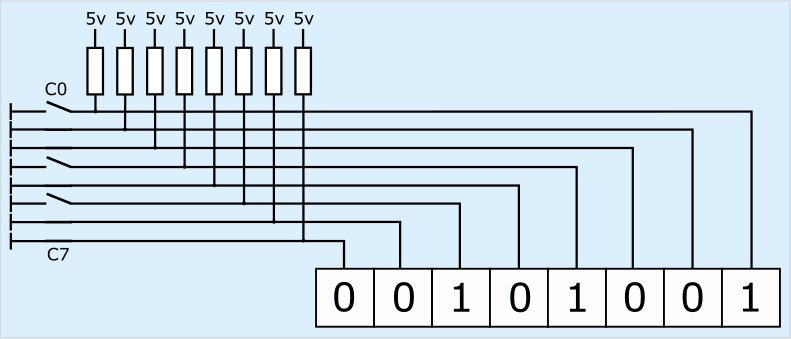
Poniższe obrazy pokazują, jak z pozycji przełącznika powstaje wartość 1 lub 0. Za pomocą rezystora podciągającego napięcie 5 woltów zapewnia a logiczne 1 na wejściu procesora po otwarciu przełącznika. Napięcie na rezystorze podciągającym nie jest wówczas połączone z masą. Kiedy przełączniki się zamykają, na rezystorze podciągającym następuje spadek napięcia. Napięcie na wejściu procesora wynosi 0 woltów logiczne 0.
Wszystkie przełączniki otwarte: 11111111 na wejściu procesora
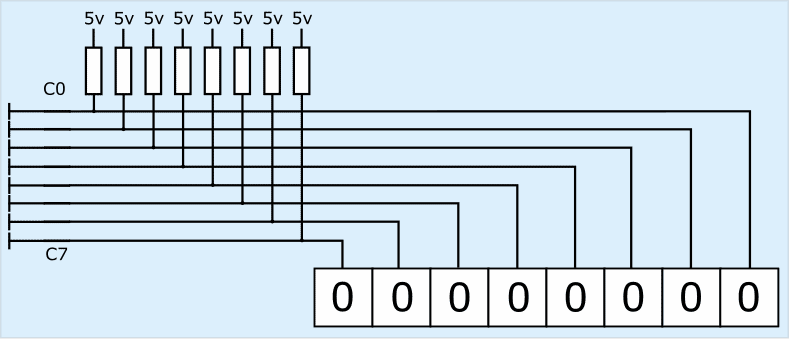
Wszystkie przełączniki zamknięte: 00000000 na wejściu procesora
Kombinacja przełączników otwartych i zamkniętych tworzy serię jedynek i zer. Na rysunku 8-bitowy komunikat do procesora to: 00101001.
W przypadku procesora 8-bitowego osiem bitów jest odczytywanych jednocześnie w cyklu. Podczas kolejnego cyklu, który ma miejsce podczas kolejnego „tyku” zegara (patrz pkt magistrala systemowa na stronie o działaniu ECU) następuje sekwencja z ośmioma nowymi bitami.
Przełączniki otwarte i zamknięte: 00101001 na wejściu procesora
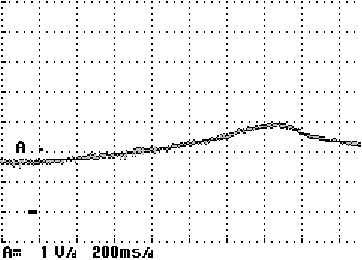
Konwersja napięć czujników analogowych na komunikat cyfrowy: Cyfrowe sygnały wejściowe są przetwarzane bezpośrednio przez procesor. Sygnały analogowe są najpierw konwertowane na sygnał cyfrowy w przetworniku A/D. Jako przykład bierzemy analogową krzywą napięcia czujnika ciśnienia turbo:
na biegu jałowym napięcie wynosi około 1,8 wolta;
podczas przyspieszania napięcie wzrasta do prawie 3 woltów.
Zmiany napięcia nie można przetworzyć bezpośrednio w procesorze. Najpierw zmierzone napięcie należy przeliczyć na wartość dziesiętną (0 do 255).
Z zakresem od 0 do 5 woltów i wartością dziesiętną od 0 do 255 (czyli 256 możliwości). Proste obliczenie pokazuje, że jeśli podzielimy 5 woltów przez 256 możliwości, można uzyskać kroki co 19,5 mV (0,0195 wolta).
Powyższy przykład pokazał rozwój napięcia w funkcji czasu czujnika ciśnienia turbo. Krzywa napięcia czujnika temperatury i czujnika położenia pedału przyspieszenia jest taka sama, tylko w innym przedziale czasowym: podgrzewanie płynu chłodzącego trwa dłużej niż nawijanie turbosprężarki.
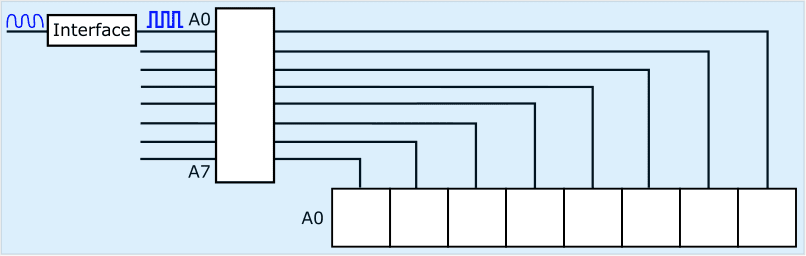
Wcześniej w tej sekcji znajduje się obraz przedstawiający kategorię sygnałów analogowych. Pokazuje to między innymi czujnik temperatury i czujnik położenia pedału przyspieszenia. Napięcie analogowe jest przetwarzane w przetworniku A/D na 8-bitową jednostkę informacji. Wiele procesorów z wieloma pinami wejściowymi ma tylko jeden przetwornik A/D. Wiele sygnałów analogowych jest łączonych w jeden sygnał za pomocą multipleksowania.
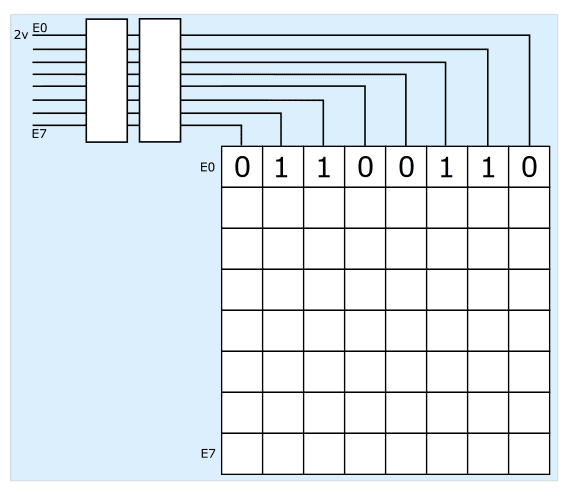
W tym przykładzie widzimy przetwornik A/D z ośmioma wejściami. Na pinie 0 występuje napięcie 2 V. Piny E1 do E7 mogą być jednocześnie zasilane napięciem. Są one konwertowane jeden po drugim na wiadomość cyfrową za pomocą multipleksowania.
Napięcie 2 V jest konwertowane na wartość binarną. Za pomocą poniższego wzoru możemy przeliczyć napięcie analogowe na wartość dziesiętną, a następnie przekonwertować je na wartość binarną:
2 V / 5 V * 255 d = 102 d
Tutaj dzielimy napięcie wejściowe (2 V) przez napięcie maksymalne (5 V) i mnożymy je przez maksymalną wartość dziesiętną (255).
Wykonując pewne obliczenia lub wykonując sprytną sztuczkę, możemy zamienić liczbę dziesiętną 255d na wartość binarną 01100110. Zobacz na to stronę: binarny, dziesiętny, szesnastkowy.
8-bitowy przetwornik A/D
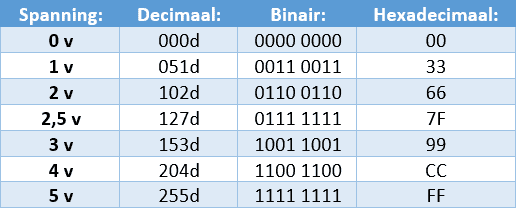
Poniższa tabela przedstawia wartości dziesiętne, binarne i szesnastkowe powiązane z różnymi napięciami.
Podczas odczytu danych na żywo może zostać wyświetlona dziesiętna, binarna lub szesnastkowa wartość sygnału czujnika.
Sygnał napięciowy <0,5 V (025d) jest uważany za zwarcie z masą;
Jeśli sygnał wzrośnie powyżej 4,5 V (220d), komputer interpretuje to jako zwarcie z plusem.
Napięcie w wartościach dziesiętnych, binarnych i szesnastkowych
Konwersja sygnałów generatora impulsów na wiadomość cyfrową: Sygnały z generatorów impulsów, w tym z indukcyjnego czujnika położenia wału korbowego, są w rzeczywistości sygnałami włączenia-wyłączenia, które powstają po przesunięciu się zębów koła impulsowego obok czujnika. Zanim sygnał zostanie przesłany do procesora, napięcie przemienne czujnika musi zostać najpierw przekształcone na napięcie prostokątne.
Na rysunku widzimy sinusoidalne napięcie przemienne po lewej stronie interfejsu. W elektronice interfejsu to napięcie przemienne jest przekształcane na napięcie prostokątne. To napięcie bloku jest następnie odczytywane przez blok czasowy/licznikowy: gdy impuls jest wysoki, licznik rozpoczyna zliczanie i przestaje zliczać, gdy impuls ponownie staje się wysoki. Liczba zliczeń jest miarą czasu okresu. częstotliwość sygnału.
Konwersja sygnału generatora impulsów na sygnał cyfrowy za pomocą bloku timera/licznika
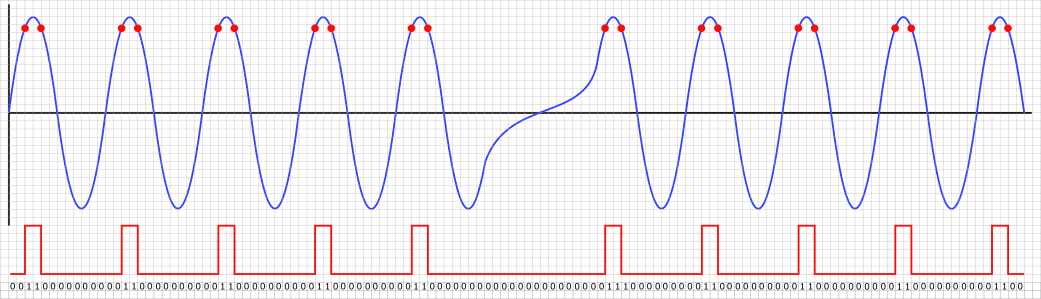
Na obrazku poniżej widzimy sygnał z czujnika indukcyjnego wału korbowego z czerwonymi kropkami na górnych bokach. Czerwone punkty są ustawione na napięcie zwiększające (logiczne 1) lub zmniejszające (logiczne 0) napięcie bloku. Wyjaśnienie znajduje się poniżej tego obrazu.
Sinusoidalne napięcie przemienne i sygnał cyfrowy bez histerezy
Jednak napięcie czujnika nigdy nie jest całkowicie czyste. Zawsze będą występować niewielkie wahania profilu napięcia. W takim przypadku elektronika interfejsu może błędnie wskazywać to jako logiczne 0, podczas gdy w rzeczywistości powinno to być 1.
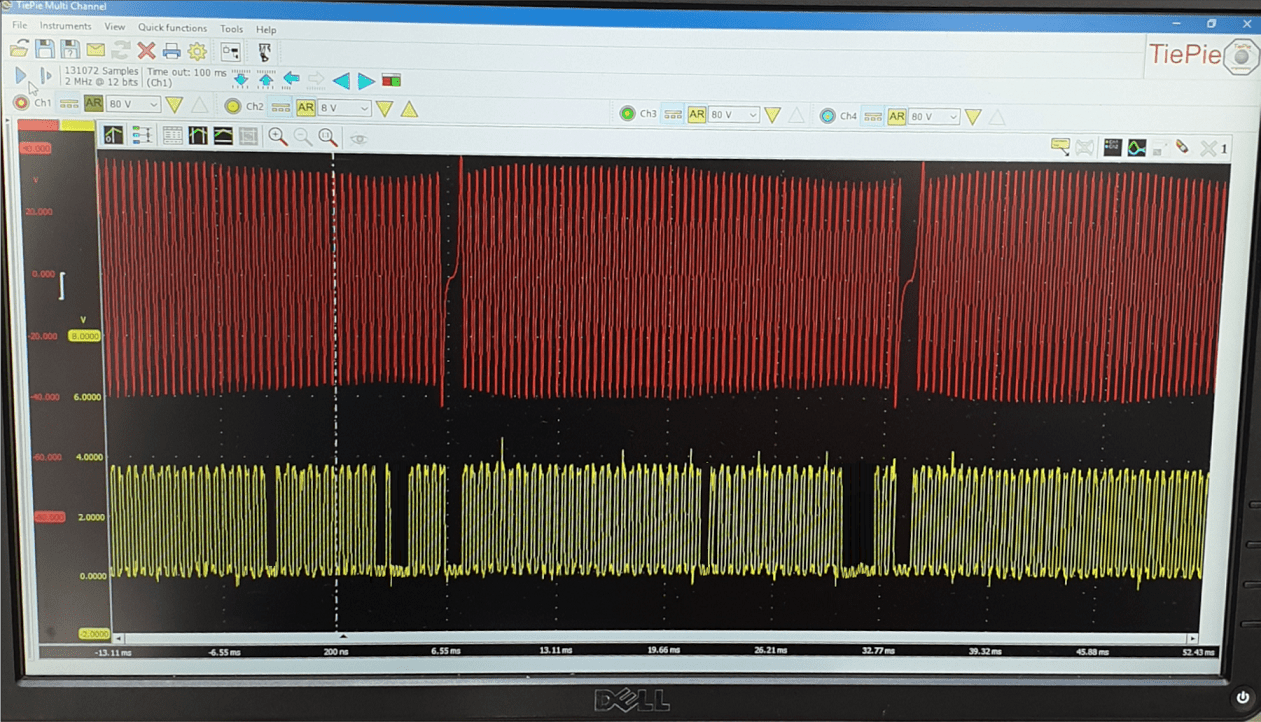
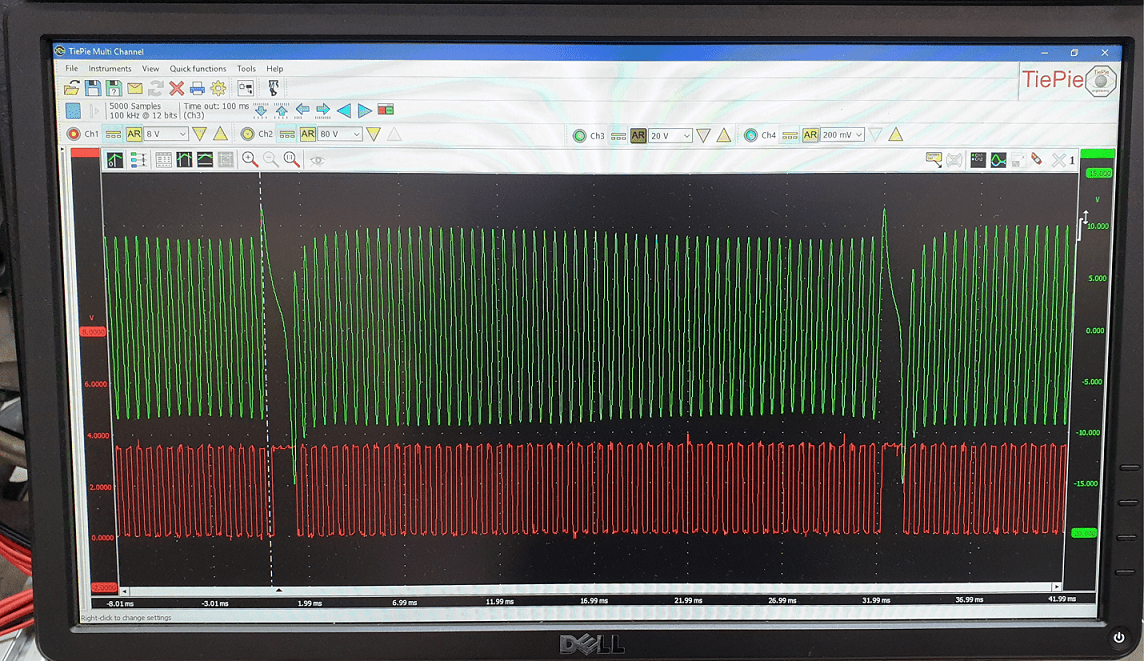
Poniższy obraz oscyloskopu został zarejestrowany podczas jego uruchamiania Projekt BMW Megasquirt. Obraz oscyloskopowy pokazuje cyfryzację (żółty) indukcyjnego sygnału wału korbowego (czerwony). Obraz wyraźnie pokazuje, że w sygnale żółtego bloku brakuje impulsów, podczas gdy w sygnale wału korbowego w tym momencie nie przechodzi żaden brakujący ząb.
Nieczysty sygnał cyfrowy zawiera błędy: brakuje informacji
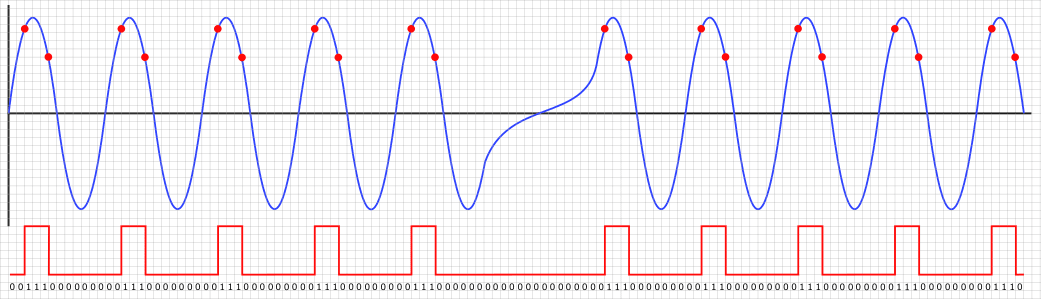
Aby małe wahania profilu napięcia nie powodowały błędnej interpretacji przez ECU, wbudowana została tzw. histereza. Histereza jest różnicą między narastającymi i opadającymi zboczami profilu napięcia. Na poniższym obrazku widzimy, że czerwone kropki na wznoszących się krawędziach mają wyższe napięcie niż czerwone kropki na opadających krawędziach. Dzięki temu mamy pewność, że niewielkie wahania sygnału nie mają wpływu na konwersję cyfrową.
W pierwszym akapicie, w którym zaczęliśmy od konwersji sygnału impulsowego na sygnał cyfrowy, wspomniano już, że częstotliwość sygnału wyznaczana jest na podstawie czasu pomiędzy dwoma narastającymi zboczami sygnału kwadratowego. Z tych przykładów można jasno wywnioskować, że histereza rzeczywiście wpływa na szerokość sygnału kwadratowego, ale nie ma wpływu na czas pomiędzy zboczami narastającymi, a zatem nie ma wpływu na częstotliwość sygnału.
Cyfrowy sygnał generatora impulsów z histerezą
Przy odpowiednio ustawionej histerezie sygnał sinusoidalny jest prawidłowo przekształcany na użyteczne napięcie fali prostokątnej, z tym że w miejscach przejścia brakującego zęba znajdują się tylko wielokrotne napięcia logiczne.
Należy pamiętać, że podczas konfigurowania ECU MegaSquirt zmieniono ustawienia, w tym wyzwalanie na liniach narastających i opadających. W efekcie przy mijaniu brakującego zęba w pierwszym przykładzie napięcie wynosi 0 woltów, a na obrazku poniżej napięcie wynosi 5 woltów.
Sygnał generatora impulsów z czystym i prawidłowym napięciem fali prostokątnej
Sygnały wyjściowe: Sygnały wyjściowe składają się z cyfrowych impulsów włączania/wyłączania o zakresie napięcia od 0 do 5 woltów (poziom TTL) i bardzo niskim prądzie. Siłowniki wymagają jednak sterowania przy wyższych poziomach napięcia i prądu. Sygnały włączenia/wyłączenia mogą być modulowane szerokością impulsu (PWM), gdzie szerokość impulsu może zmieniać się ze stałą częstotliwością.
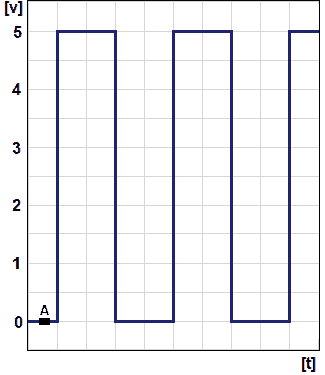
Poniższy rysunek przedstawia napięcie w postaci fali prostokątnej na poziomie TTL w funkcji czasu. The cykl roboczy tego sygnału PWM wynosi 50%.
Do sterowania siłownikami potrzebne są sterowniki. Dzięki cyfrowemu sygnałowi wyjściowemu wymagany prąd można uzyskać za pomocą sterownika. W następnej sekcji omówimy sterowniki.
Przykład: sygnał PWM
Sterowniki znajdziemy w każdym ECU oraz w niektórych elementach wykonawczych np. cewkach zapłonowych DIS. Sterownik nazywany jest także stopniem wyjściowym lub tranzystorem mocy. Sterownik umożliwia konwersję sygnałów wyjściowych na poziomie TTL: od 0 do 5 V, przy niskim prądzie 1 mA z ECU na napięcia do 14 V i prądy do około 10 A.
Sterownik może podłączyć kilka tranzystory zawierać. Taki tranzystor nazywamy „Tranzystor Darlingtona„. Poniższe obrazy przedstawiają następujące obwody:
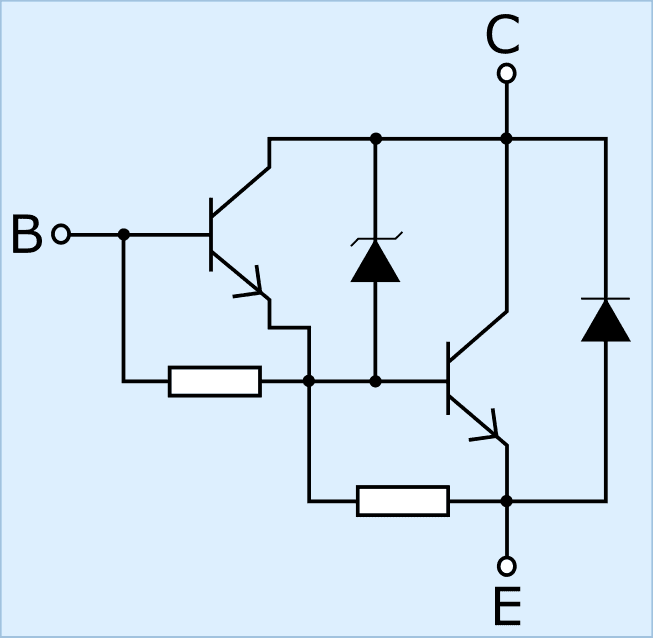
Schemat obwodu Darlingtona z dwoma tranzystorami do sterowania cewką zapłonową (źródło: arkusz danych BU941ZR).
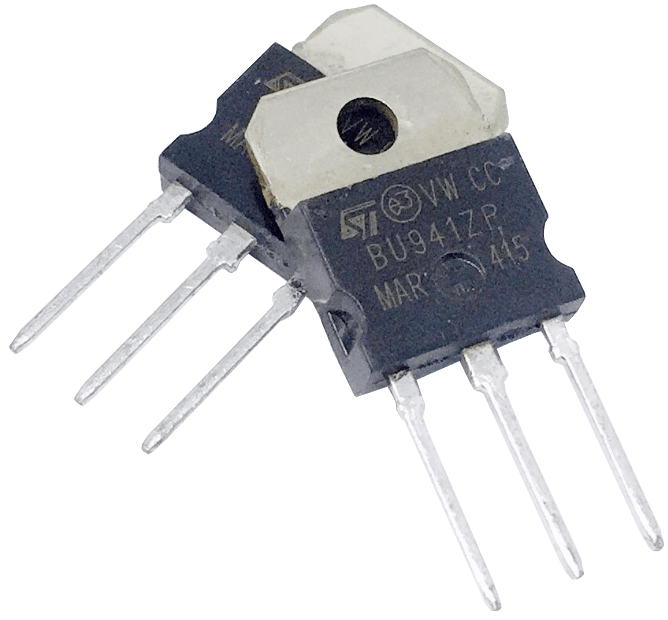
Dwa tranzystory, każdy z obwodem Darlingtona (BU941ZR)
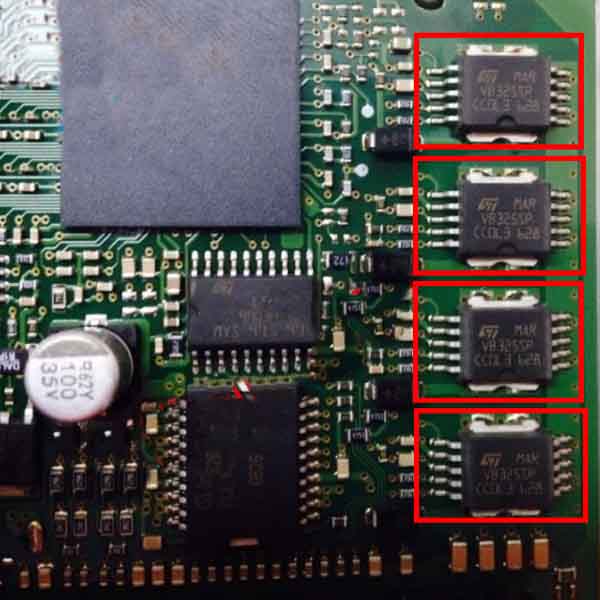
Układy scalone sterownika z obwodami Darlingtona i dodatkową elektroniką, m.in. do ochrony temperaturowej i przekazywania informacji zwrotnej do mikroprocesora.
1. Obwód Darlingtona
2. Tranzystory Darlingtona (2x)
3. Układy scalone sterownika z wieloma obwodami Darlingtona
Na stronie: sposoby sterowania siłownikami bardziej szczegółowo omówiono sterowanie pasywnymi, aktywnymi i inteligentnymi elementami wykonawczymi za pomocą tranzystora (mocy) lub FET.