Przedmioty:
- Generał ESP
- Inne nazwy ESP
- Podsterowność
- Zdenerwowany
- Czujnik kąta skrętu
- Czujnik przyspieszenia poprzecznego (czujnik G)
- Czujnik momentu odchylenia (czujnik odchylenia)
- Czujnik ciśnienia hamulca
Informacje ogólne dotyczące ESP:
ESP to skrót od Electronic Stability Program i działa w połączeniu z ABS i ASR. Jeżeli pojazd jest wyposażony w ABS (układ przeciwblokujący) i ASR/ASC (regulacja/kontrola przeciwpoślizgowa), można dodać system ESP za pomocą szeregu dodatkowych czujników i regulacji oprogramowania. Podzespoły takie jak czujniki prędkości kół i pompa/jednostka sterująca ABS są również wykorzystywane w układzie ESP. System ESP reguluje także redukcję mocy silnika; zamykając bardziej przepustnicę lub wyłączając zapłon.
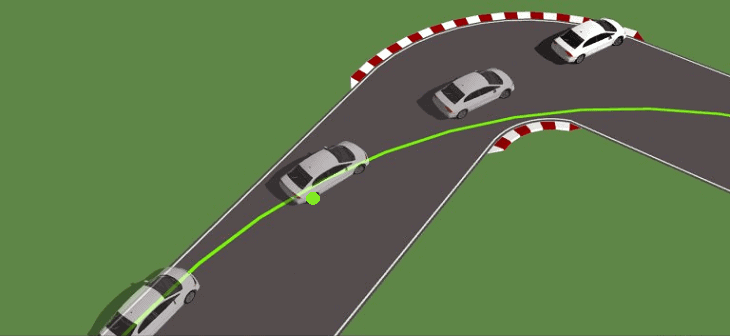
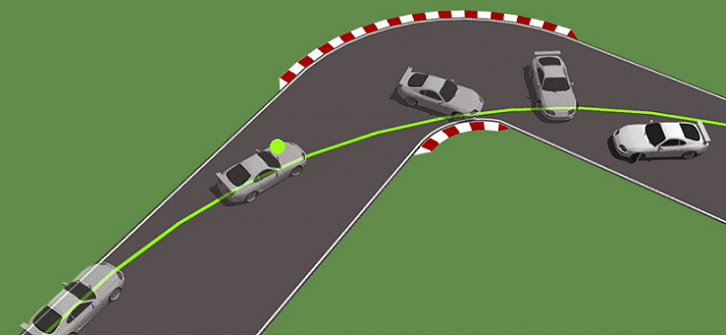
Zadaniem układu ESP jest poprawa zachowania pojazdu na zakrętach (podsterowność i nadsterowność). Dotyczy to między innymi sytuacji, gdy następuje uruchomienie hamulca na zakręcie lub wykonanie manewru wymijania. System ESP hamuje jedno koło pojazdu, dzięki czemu przywracane są normalne właściwości kierownicze. Poniżej przedstawiono 2 sytuacje, w których koło oznaczone kolorem zielonym jest hamowane. Hamując, pojazd będzie podążał za zieloną linią, zamiast wymknąć się spod kontroli. Na dole tej strony opisano różne wymagane komponenty ESP.
Inne nazwy ESP:
Producenci samochodów często używają własnych nazw ESP dla swoich modeli, mimo że działanie jest takie samo. Te inne nazwy nadano, aby system wyglądał na „bardziej luksusowy” niż standardowy ESP. Przykładami tego są:
- ASC + T: Automatyczna kontrola stabilności i trakcji (BMW starej generacji sprzed 1996 r.)
- DSC: Program dynamicznej stabilności: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynamiczna stabilność i kontrola trakcji (Volvo)
- ESP: Elektroniczny program stabilizacji (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagena
- PSM: Zarządzanie stabilnością Porsche (Porsche)
- VDC: Kontrola dynamiki pojazdu (Alfa Romeo)
- VDCS: System dynamicznej kontroli pojazdu (Subaru)
- VSC: Kontrola stabilności pojazdu (Lexus, Toyota)
- VSA: Asystent stabilności pojazdu (Honda)
Podsterowność:
Podsterowność występuje, gdy przednie opony nie mają już wystarczającej przyczepności do nawierzchni drogi. Samochód będzie skręcał łagodniej niż zamierzono, więc będzie miał większą tendencję do jazdy na wprost. W związku z tym przednie koła będą się przesuwać na zewnątrz zakrętu. Podsterowność można wyeliminować, aby przednie koła ponownie miały wystarczającą przyczepność do nawierzchni. Aby to osiągnąć, możesz zużywać mniej gazu lub mniej sterować. Jeszcze lepsze sterowanie nie pomoże w walce z podsterownością, a nawet może ją pogorszyć, ponieważ koła będą miały tylko mniejszą przyczepność. Większość producentów samochodów dostosowuje podwozie w taki sposób, że samochód ma tendencję do podsterowności, a nie nadsterowności. Dzieje się tak dlatego, że przeciętny kierowca w takiej sytuacji natychmiast odpuszcza gaz (co może być rozwiązaniem przywracającym przyczepność auta).
Zdenerwowany:
Nadsterowność występuje, gdy tylne opony przestają trzymać się nawierzchni. Tylne opony samochodu będą się przesuwać na zewnątrz zakrętu. Tył chce wówczas wyprzedzić przód, powodując obrót pojazdu wokół własnej osi. Nadsterowność można skorygować poprzez kontrowanie i zwolnienie w przypadku samochodów z napędem na tylne koła (np. BMW) oraz nieco większe dodanie gazu w przypadku samochodów z napędem na przednie koła (np. Volkswagen). Często, szczególnie w sportach motorowych, świadomie wykorzystuje się nadsterowność, aby łatwiej i szybciej pokonywać kombinację zakrętów. W skrajnym przypadku tę formę zdenerwowania nazywa się „dryfowaniem”. Nadsterowność jest na ogół bardziej niebezpieczna niż podsterowność, ponieważ większość kierowców ma mniejsze szanse na jej skorygowanie. Dlatego też projektując samochód, podwozie jest dostosowane bardziej w stronę „podsterowności”, ponieważ łatwiej ją skorygować.
Czujnik kąta skrętu:
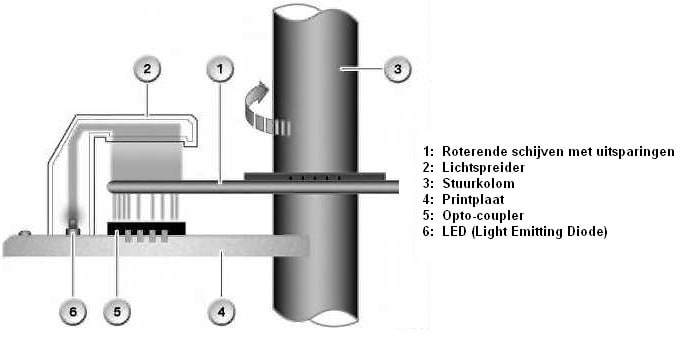
Czujnik kąta skrętu montowany jest na kolumnie kierownicy. Może się to znajdować w pobliżu drążka kierowniczego, ale także we wnętrzu pomiędzy dźwigniami kierunkowskazów/wycieraczek, jak pokazano na obrazku po prawej stronie. Są to przełączniki kolumny kierowniczej z BMW.
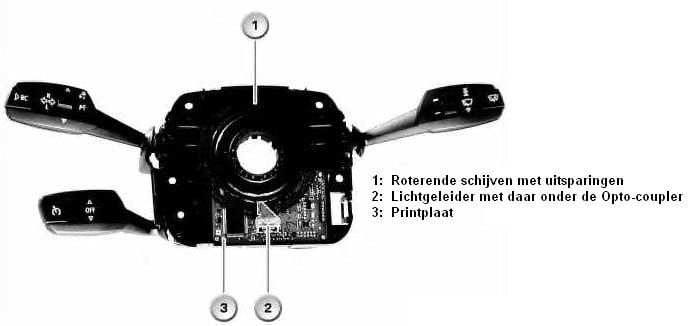
Zadaniem czujnika kąta skrętu jest pomiar kąta obrotu kierownicy. Czujnik ten wykorzystuje jeden lub więcej transoptorów, które mierzą transmisję światła przez obracające się dyski. Odstępy świetlne są różne w każdym miejscu obracającej się tarczy, co pozwala na dokładne rozpoznanie położenia kierownicy. Wszystkie wgłębienia w dyskach tworzą asymetryczny sygnał kwadratowy. Transoptor może przekształcić sygnał świetlny w napięcie, które jest następnie przekazywane do jednostki sterującej.
Czujnik przyspieszenia poprzecznego (czujnik G):
Czujnik przyspieszenia bocznego (zwany także czujnikiem siły G) jest umieszczony możliwie jak najbardziej pośrodku samochodu. Podczas pokonywania zakrętów ruchoma płytka (patrz zdjęcie poniżej, numer 2) przesuwa się pomiędzy kondensatorami (1). Kondensatory mają napięcie 5 woltów. Gdy płytka jest pośrodku (tj. gdy samochód jedzie na wprost) napięcie na obu kondensatorach wynosi 2,5 V. Kiedy samochód skręca (w przypadku zdjęcia po lewej stronie), płyta przesuwa się w jedną stronę pod wpływem siły odśrodkowej i siły dośrodkowej.
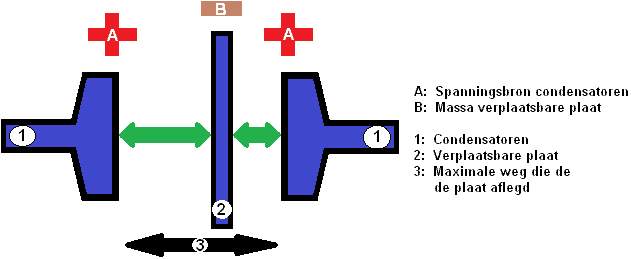
Kiedy płyta się przesuwa, pojemność prawego kondensatora spada. Nie będzie to teraz 2,5 V, ale na przykład 1,5 V. Sterownik ESP rozpoznaje różnicę między dwoma kondensatorami i na tej podstawie może określić, jak duża jest siła odśrodkowa lub siła dośrodkowa (tj. jak ostry jest zakręt. W ten sposób można określić, czy samochód jest na przykład nadsterowny). . Wartości tego czujnika przyspieszenia bocznego służą do porównania danych z czujników prędkości kół i ustalenia, czy system ESP powinien interweniować.
Czujnik momentu odchylenia (czujnik odchylenia):
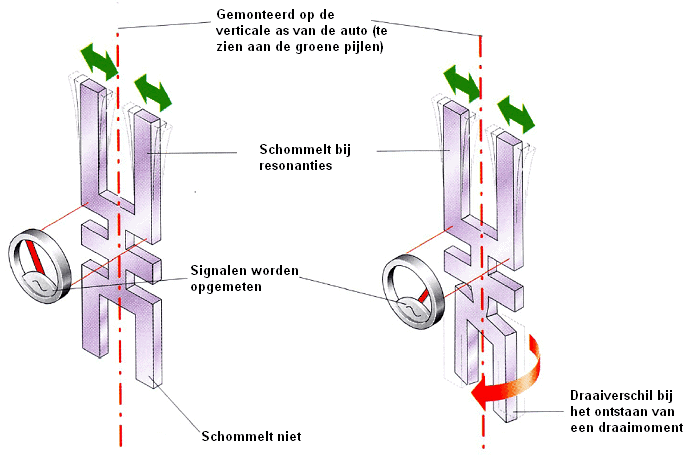
Czujnik momentu odchylenia, zwany także po angielsku „czujnikiem odchylenia”, jest umieszczony możliwie jak najbardziej na środku samochodu wraz z czujnikiem przyspieszenia bocznego. Czujnik dostarcza dane potrzebne systemowi ESP. Czujnik momentu odchylenia rejestruje tendencję pojazdu do obracania się wokół osi pionowej. Wartość tego pomiaru nazywana jest prędkością obrotową i jest wyświetlana w stopniach na sekundę.
Czujnik składa się z dwóch kamertonów. Górny kamerton wprawia się w drgania (rezonans) przy napięciu zmiennym 11000 Hz (11 kHz) i obraca się, gdy pojazd pokonuje zakręt. Im ostrzejszy zakręt, tym bardziej dolny kamerton jest skręcony w stosunku do górnego widelca. Zasada opiera się na siłach żyroskopowych (siła Coriolisa). Kiedy część obrotowa zostanie przesunięta z pozycji w wyniku skrętu, powstają siły żyroskopowe. Stąd nazwa czujnik momentu odchylenia.
W wyniku skręcenia element piezoelektryczny wytwarza różnicę napięcia, która jest mierzona przez urządzenie sterujące. Generowane napięcie waha się od 0 do 5 woltów. W pozycji spoczynkowej (gdy nie zarejestrowano żadnego obrotu) czujnik emituje napięcie 2,5 V.
Czujnik ciśnienia hamulca:
Do układu hamulcowego dodano także osobne czujniki ciśnienia hydraulicznego (w obu obwodach), co widać na poniższych zdjęciach. W starszych samochodach czujniki te znajdują się w przewodach hamulcowych. Obecnie czujniki ciśnienia hamowania są zwykle wbudowane w jednostkę hydrauliczną samego układu ABS. To urządzenie jest często widoczne pod maską. Wszystkie hydrauliczne przewody hamulcowe są do niego podłączone.

