Temos:
- Įvadas
- Signalai iš sprendiklio
- Rezoliucijos komponentai
Įvadas:
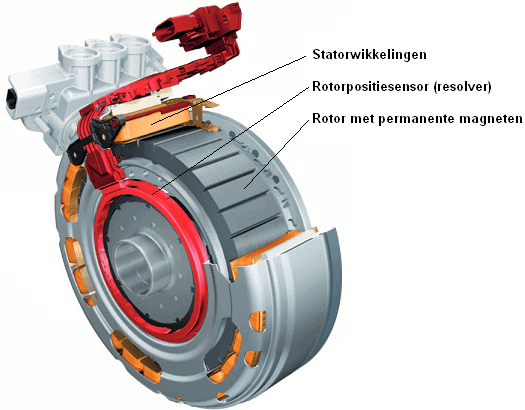
Dėl veikimo sinchroninis elektros variklis labai svarbu tinkamai nuplauti inverteris yra kontroliuojami. Norėdami nustatyti, kuriai ritei (U, V arba W) turi būti įjungta energija, keitiklio ECU nuskaito rotoriaus padėtį, kurią matuoja rotoriaus padėties jutiklis, dar vadinamas „rezolveriu“.
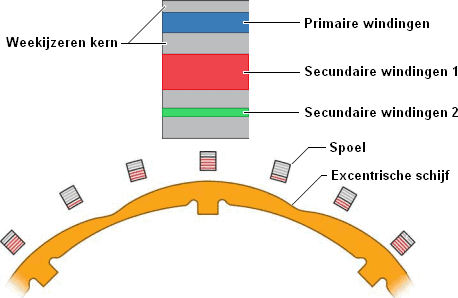
Rezolerį sudaro išorinis žiedas su daugybe ritinių besisukančios ekscentrinės plokštės vidinėje pusėje. Atstumas tarp ekscentrinės plokštės ir ritinių nuolat kinta jai besisukant.
Signalai iš sprendiklio:
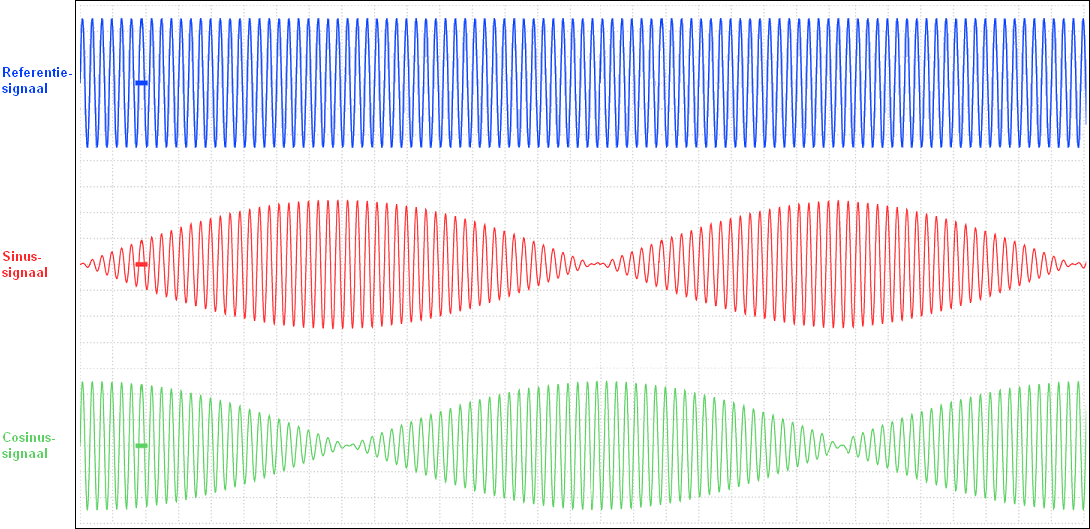
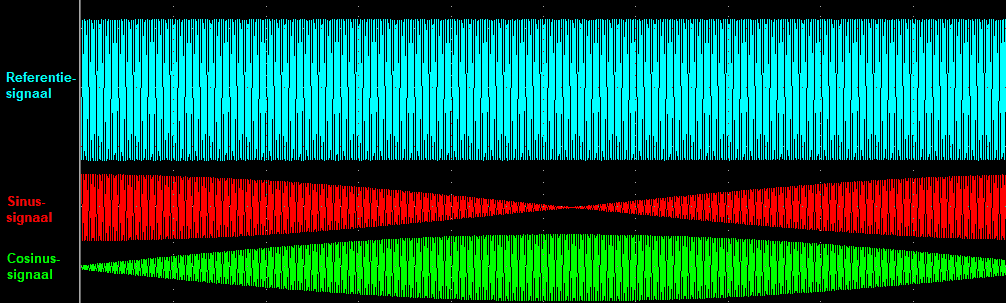
ECU suteikia sprendėjui atskaitos signalą. Oro tarpas tarp ritės ir ekscentriko sukuria aukštą arba žemą sinusinę kintamąją įtampą. Esant didelei amplitudei raudoname arba žaliame sinusoidiniame signale (žr. paveikslėlį žemiau), oro tarpas tarp ekscentriko ir ritės yra mažas.
Rezolveris veikia ir stovint, ir veikiant elektros varikliui: abiem atvejais ECU turi žinoti, kurioje padėtyje yra rotorius.
Žemiau esančiame paveikslėlyje parodyti teoriniai signalai. Iš tikrųjų dažnis yra daug didesnis, todėl sinuso ir kosinuso signalų amplitudės kitimas yra aiškiai matomas.
Toliau pateiktuose dviejuose paveikslėliuose parodytas tikrasis sprendiklio matavimas. Čia taip pat matome atskaitos signalą viršuje, o sinuso ir kosinuso signalus žemiau. Pirmas vaizdas stovi: elektros variklis neveikia. Sinuso signalo ir kosinuso signalo aukštis išlieka pastovus. Remiantis šios kintamosios įtampos lygiu, ECU žino, kur yra rotorius, kai jis stovi.
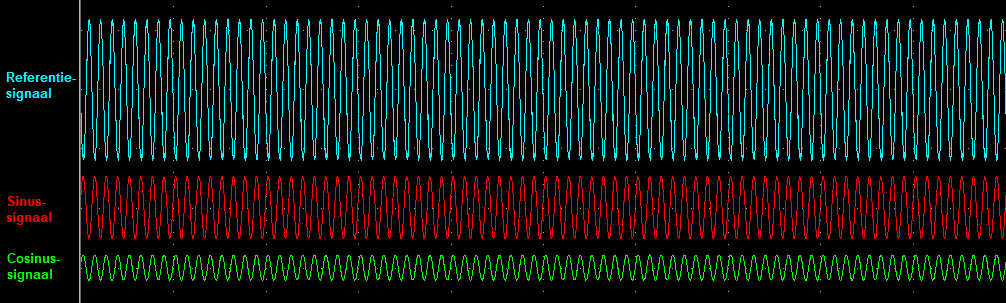
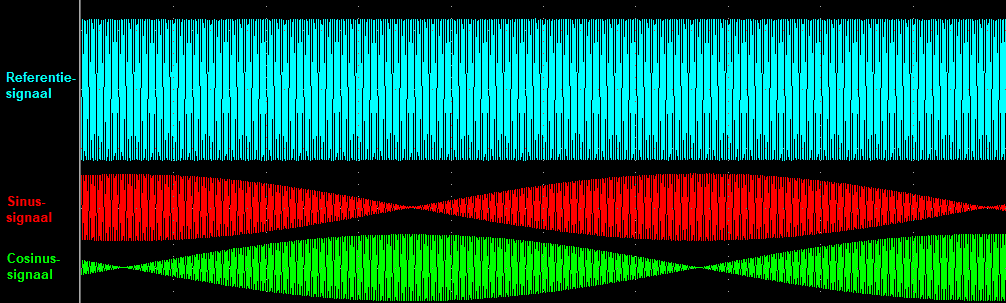
Kituose dviejuose vaizduose laikas vienam padalijimui buvo sumažintas. Atskaitos signalo dažnis skyriklyje nesikeičia, bet matuojamas ilgesnį laiką. Dėl to aiškiai matome, kaip kinta sinuso ir kosinuso signalų amplitudės. Pirmasis vaizdas buvo matuojamas esant mažam rotoriaus greičiui, o antrasis - padidintam greičiui. Didėjant greičiui, sinuso ir kosinuso signalų dažnis didėja (daugiau signalų per laiko vienetą), tačiau amplitudė (kintamosios įtampos lygis) išlieka pastovi.
Rezoliucijos komponentai:
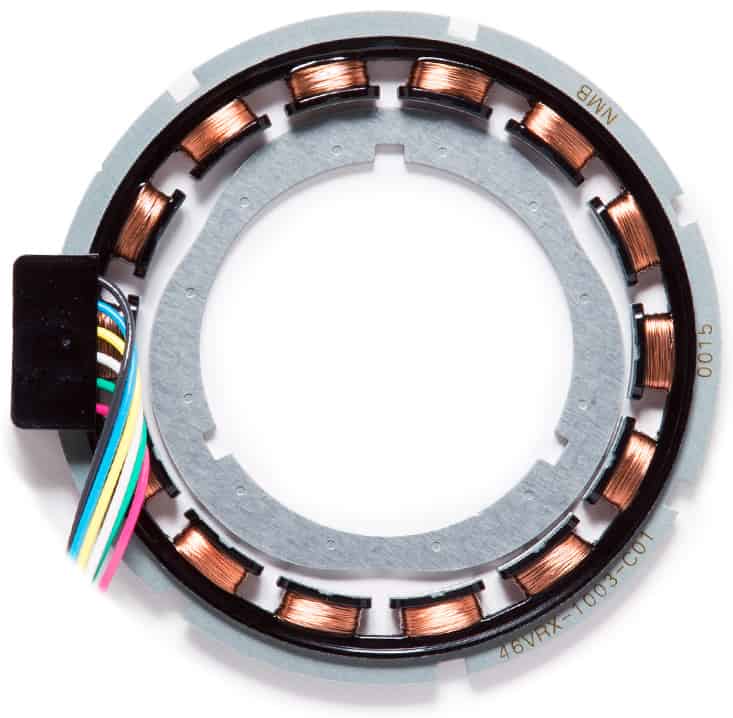
VW E-Golf skyrelyje yra 30 nuosekliai sujungtų ritinių. Kiekviena rezolverio ritė susideda iš minkštos geležies šerdies su trimis skirtingomis apvijomis: pirmine, antrine 1 ir antrine 2.
Pirminė ritė (mėlyna) tiekiama su aukšto dažnio kintamąja įtampa.
Antrinių apsisukimų skaičius (1 raudonas, 2 žalias) kiekvienoje ritėje yra skirtingas.
Kai ekscentrinės plokštės kumštelis juda išilgai ritės, antrinėse apvijose padidėja induktyvumas. Dėl antrinių apvijų 1 ir 2 apsisukimų skaičiaus kiekvienoje ritėje taip pat atsiranda skirtinga įtampa antrinėse apvijose. Inverterio ECU gali apskaičiuoti rotoriaus padėtį pagal 1 ir 2 antrinių apvijų įtampas.
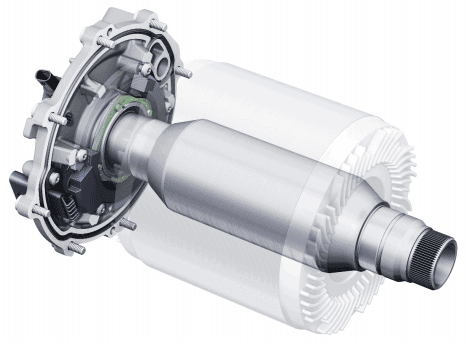
Rezolverio reguliavimas ant rotoriaus yra labai tikslus: daugelis gamintojų nurodo, kad iškilus problemoms su resolveriu turi būti pakeistas visas elektros variklis. (netyčia) išardžius resolverį arba atlaisvinus varžtus elektros variklio korpuso išorėje, resolver nebegali būti tinkamai surinktas. Tokiu atveju daugelis gamintojų nurodo pakeisti elektros variklį.
Tiksli rotoriaus padėtis a sinchroninis variklis turi būti žinomi stovint ir važiuojant. Jei jutiklis sugedęs, automobilis nebegali važiuoti.
Iš asinchroninis variklis kita vertus, nereikia stebėti rotoriaus padėties. Rotoriaus padėties jutiklis skleidžia keturis impulsus vienam rotoriaus apsisukimui. Šis matavimas stebi didžiausią slydimą tarp besisukančio magnetinio lauko tarp statoriaus ir rotoriaus. Hall jutiklis dažnai naudojamas kaip jutiklis. Holo jutiklis perduoda impulsus į ECU, kai rotorius sukasi, bet negali atlikti matavimo sustojus, kitaip nei sinchroninio variklio skyriklis. Gamintojai taip pat kartais pasirenka sinchroninio variklio skyriklį naudoti kaip rotoriaus padėties jutiklį.
Susiję puslapiai: