Temos:
- ESP bendras
- Kiti ESP pavadinimai
- Nepakankamas valdymas
- Liūdnas
- Vairavimo kampo jutiklis
- Skersinio pagreičio jutiklis (G jutiklis)
- Posūkio momento jutiklis (Pokrypio jutiklis)
- Stabdžių slėgio jutiklis
ESP bendras:
ESP yra elektroninės stabilumo programos santrumpa ir veikia kartu su ABS ir ASR. Jei automobilyje yra ABS (stabdžių antiblokavimo sistema) ir ASR/ASC (neslydimo reguliavimo / valdymo), ESP sistema gali būti pridėta naudojant daugybę papildomų jutiklių ir programinės įrangos reguliavimo. ESP sistemai taip pat naudojami komponentai, tokie kaip ratų greičio jutikliai ir ABS siurblys / valdymo blokas. ESP sistema taip pat reguliuoja variklio galios mažinimą; labiau uždarant droselį arba išjungiant degimą.
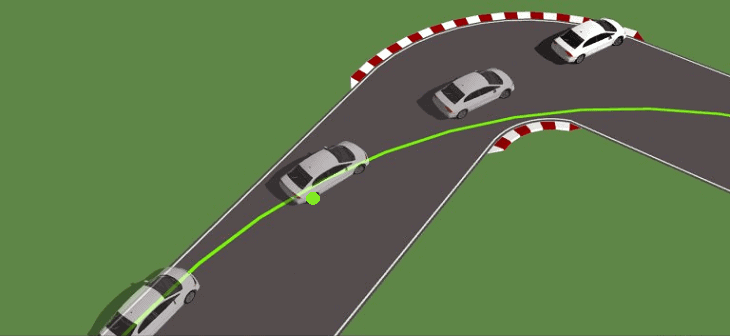
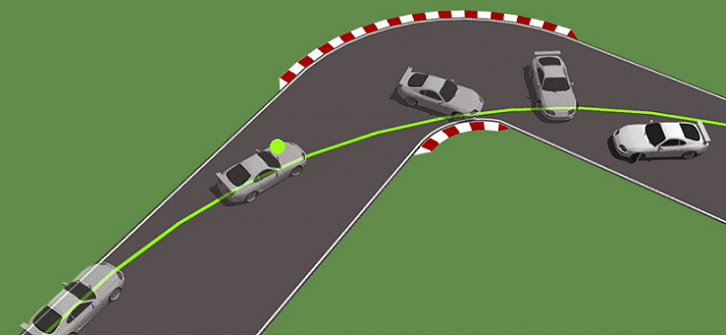
ESP sistemos tikslas – pagerinti elgseną posūkiuose (nepakankamas ir per didelis pasukimas). Tai, be kita ko, taikoma situacijoms, kai posūkyje nuspaudžiamas stabdys arba kai atliekamas išsisukimo manevras. ESP sistema stabdo vieną automobilio ratą, kad būtų atkurtos normalios vairavimo charakteristikos. Žemiau pateikiamos 2 situacijos, kai stabdomas žaliai pažymėtas ratas. Stabdant, transporto priemonė seks žaliąja linija, o ne taps nevaldoma. Įvairūs reikalingi ESP komponentai aprašyti šio puslapio apačioje.
Kiti ESP pavadinimai:
Automobilių gamintojai dažnai naudoja savo modelių ESP pavadinimus, nors jų veikimas yra tas pats. Šie kiti pavadinimai suteikti tam, kad sistema atrodytų „prabangesnė“ nei standartinis ESP. To pavyzdžiai:
- ASC + T: automatinė stabilumo ir traukos kontrolė (senos kartos BMW iki 1996 m.)
- DSC: Dinaminio stabilumo programa: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: dinaminė stabilumo ir traukos kontrolė („Volvo“)
- ESP: Elektroninė stabilumo programa (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: „Porsche“ stabilumo valdymas („Porsche“)
- VDC: transporto priemonės dinaminis valdymas („Alfa Romeo“)
- VDCS: automobilio dinaminio valdymo sistema („Subaru“)
- VSC: transporto priemonės stabilumo kontrolė („Lexus“, „Toyota“)
- VSA: transporto priemonės stabilumo asistentas („Honda“)
Nepakankamas valdymas:
Nepakankamas pasukamumas atsiranda tada, kai priekinės padangos nebeturi pakankamo sukibimo su kelio danga. Automobilis darys švelnesnį posūkį nei numatyta, todėl bus labiau linkęs važiuoti tiesiai. Todėl priekiniai ratai slys į posūkio išorę. Galima pašalinti nepakankamą pasukamumą, kad priekiniai ratai vėl pakankamai sukibtų su kelio danga. Norėdami tai pasiekti, galite naudoti mažiau dujų arba mažiau vairuoti. Dar didesnis vairavimas nepadės nuo nepakankamo pasukimo, tai gali net pabloginti padėtį, nes ratai tik mažiau sukibs. Dauguma automobilių gamintojų sureguliuoja važiuoklę taip, kad automobilis būtų linkęs į per mažą, o ne per daug pasukamumą. Priežastis ta, kad paprastas vairuotojas tokioje situacijoje iš karto išleidžia dujas (tai gali būti sprendimas, kuris vėl suteikia automobiliui sukibimą).
Liūdnas:
Per didelis pasukimas atsiranda, kai galinės padangos nebesukimba su kelio danga. Galinės automobilio padangos slys link išorės posūkyje. Tada galinė dalis nori aplenkti priekį, todėl transporto priemonė sukasi apie savo ašį. Perteklinį vairavimą galima koreguoti priešpasukimu ir sulėtinimu galiniais ratais varomiems automobiliams (pvz., BMW), o priekiniais ratais varomiems automobiliams – šiek tiek daugiau dujų (pvz., Volkswagen). Dažnai, ypač automobilių sporte, sąmoningai naudojamas per didelis vairavimas, kad posūkio derinį būtų galima lengviau ir greičiau pravažiuoti. Kraštutiniu atveju ši nusiminimo forma vadinama „dreifavimu“. Per didelis pasukimas paprastai yra pavojingesnis nei per mažas pasukimas, nes daugumai vairuotojų rečiau pavyks jį ištaisyti. Būtent todėl kuriant automobilį važiuoklė labiau pritaikyta „nepakankamam pasukamumui“, nes tai lengviau ištaisyti.
Vairavimo kampo jutiklis:
Vairo kampo jutiklis sumontuotas ant vairo kolonėlės. Tai gali būti šalia vairo stovo, bet ir viduje tarp posūkio signalo / valytuvų svirčių, kaip parodyta paveikslėlyje dešinėje. Tai vairo kolonėlės jungikliai iš BMW.
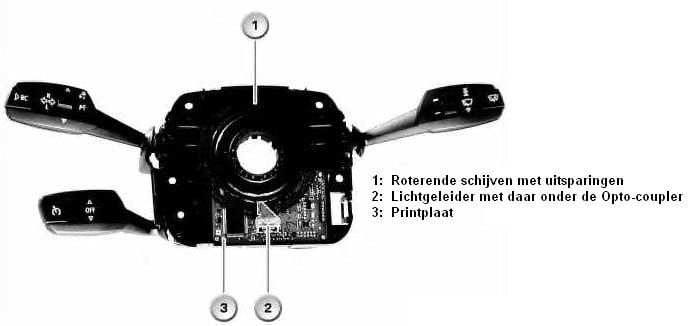
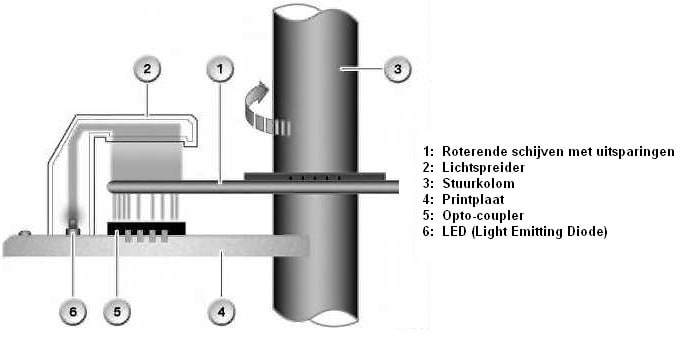
Vairo kampo jutiklio užduotis yra išmatuoti vairo sukimosi kampą. Šis jutiklis naudoja vieną ar daugiau optinių jungčių, kurios matuoja besisukančių diskų šviesos pralaidumą. Šviesos tarpai kiekvienoje besisukančio disko vietoje yra skirtingi, todėl galima atpažinti tikslią vairo padėtį. Visi diskų įdubimai sukuria asimetrinį kvadratinį signalą. Opto jungtis gali konvertuoti šviesos signalą į įtampą, kuri vėliau perduodama valdymo blokui.
Skersinio pagreičio jutiklis (G jutiklis):
Šoninio pagreičio jutiklis (dar vadinamas G jėgų G jutikliu) yra kuo labiau automobilio centre. Posūkyje judama plokštė (žr. paveikslėlį žemiau, numeris 2) pasislenka tarp kondensatorių (1). Kondensatoriai turi 5 voltų įtampą. Kai plokštė yra viduryje (t. y. kai automobilis važiuoja tiesiai) abiejų kondensatorių įtampa yra 2,5 volto. Kai automobilis sukasi (vaizdo atveju į kairę), plokštelė pasislenka į vieną pusę dėl išcentrinės jėgos ir įcentrinės jėgos.
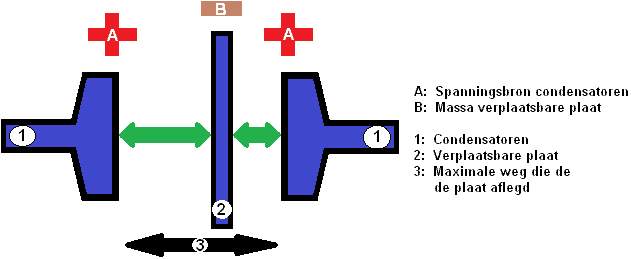
Kai plokštė pasislenka, dešiniojo kondensatoriaus talpa sumažėja. Dabar tai bus ne 2,5 volto, o, pavyzdžiui, 1,5 V. ESP valdymo blokas atpažįsta skirtumą tarp dviejų kondensatorių ir pagal tai gali nustatyti, kokia yra išcentrinė arba įcentrinė jėga (t. y. koks staigus posūkis. Tokiu būdu galima nustatyti, ar, pavyzdžiui, automobilis neperlenkiamas) . Šio šoninio pagreičio jutiklio reikšmės naudojamos norint palyginti ratų greičio jutiklių duomenis ir nustatyti, ar ESP sistema turėtų įsikišti.
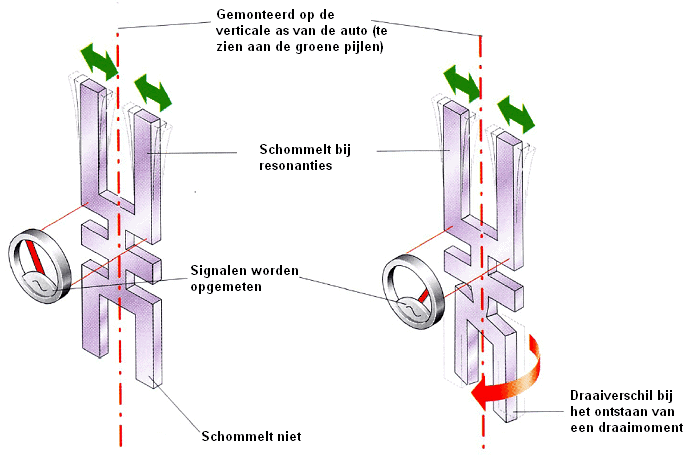
Posūkio momento jutiklis (Pokrypio jutiklis):
Posūkio momento jutiklis, angliškai dar vadinamas „Nukrypimo jutikliu“, yra kuo labiau automobilio centre kartu su šoninio pagreičio jutikliu. Jutiklis pateikia duomenis, kurių reikia ESP sistemai. Posūkio momento jutiklis registruoja transporto priemonės polinkį suktis aplink vertikalią ašį. Šio matavimo vertė vadinama sukimosi greičiu ir rodoma laipsniais per sekundę.
Jutiklis susideda iš dviejų kamertonų. Viršutinė kamertono šakė vibruoja (rezonansas) 11000 11 Hz (XNUMX kHz) su kintamąja įtampa ir sukasi, kai transporto priemonė važiuoja posūkyje. Kuo staigesnis posūkis, tuo labiau apatinė kamertonas pasisuka viršutinės šakės atžvilgiu. Principas pagrįstas giroskopinėmis jėgomis (Koriolio jėga). Kai besisukanti dalis susukama iš vietos, susidaro giroskopinės jėgos. Iš čia kilo posūkio momento jutiklio pavadinimas.
Dėl sukimo pjezo elementas sukuria įtampos skirtumą, kurį išmatuoja valdymo įtaisas. Sukurta įtampa svyruoja nuo 0 iki 5 voltų. Ramybės padėtyje (kai neregistruojamas sukimasis) jutiklis skleidžia 2,5 volto įtampą.
Stabdžių slėgio jutiklis:
Taip pat prie stabdžių sistemos (abiejose grandinėse) buvo pridėti atskiri hidraulinio slėgio jutikliai, kuriuos galima pamatyti toliau pateiktuose paveikslėliuose. Senesniuose automobiliuose šie jutikliai yra stabdžių linijose. Šiais laikais stabdžių slėgio davikliai dažniausiai įmontuojami į pačios ABS sistemos hidraulinį mazgą. Šis įrenginys dažnai matomas po gaubtu. Prie to prijungtos visos hidraulinės stabdžių linijos.

