科目:
- エンジン管理システム用のセンサーを決定して設置する
- クランクポジションセンサ
- パルスホイール
- マップセンサー
- 水温センサー
- ラムダプローブ
エンジン管理システム用のセンサーを決定して取り付けます。
エンジン管理システムには多数のセンサーが必要です。 センサーはシステムの「入力」として機能します。 センサーは物理量をコンピューター (この場合は MegaSquirt) で処理できる電気信号に変換します。
MegaSquirt の構造は異なる場合があるため、MegaSquirt の組み立てプロセスでは、エンジンに搭載されるコンポーネントを考慮する必要があります。
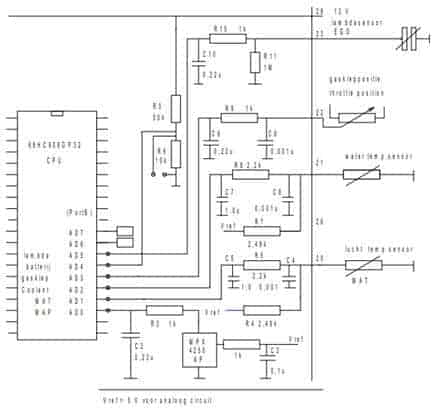
この図は、これらのコンポーネントが配置されているさまざまなセンサー回路を示しています。 図に示されている入力信号は、ラムダ センサー、スロットル ポジション センサー、冷却水温度センサー、気温センサーからのものです。
センサーに加えて、図には多数の抵抗器とコンデンサーも含まれています。 これらのコンポーネントの組成によりフィルターが形成されます。 これらのフィルターは、干渉信号とノイズを捕捉する役割を果たします。 センサー信号がノイズによって歪むと、アクチュエーターの制御、ひいてはモーターの機能に大きな影響を与える可能性があります。
クランクポジションセンサ:
エンジン管理システムへの重要な入力はクランクシャフト速度です。
クランクシャフト速度は、クランクシャフトポジションセンサーとパルスホイールを使用して測定されます。 クランクシャフト位置センサーには XNUMX つの重要な機能があります。
- クランクシャフトの速度は信号の周波数に基づいて決定できます。
- パルスホイールの欠けている歯は、シリンダー 1 と 4 のピストンが TDC の数度前にあるクランクシャフトの位置を示しています。
エンジン回転数は、インジェクターと点火の制御に影響します。 36-1 パルスホイールの欠けている歯は、点火時間と噴射時間を決定するために重要です。 速度センサーとして誘導パルス発生器ではなくホールセンサーを使用することが決定されました。 誘導センサーは交流電圧を生成し、MegaSquirt コントローラーで直流電圧に変換する必要があります。 ホール センサーは方形波電圧を生成し、内部または外部のプルアップ抵抗によって 5 ボルトまたは 12 ボルトの電圧に増幅されます。 これにより、ホール センサーは信頼性の高い信号の形成により適したものになります。 この選択は、MegaSquirt を組み立てる前に事前に行う必要があります。 どちらのセンサーも異なる回路構成が必要です。
パルスホイール:
クランクシャフト位置センサーは、エンジンに取り付けられたパルスホイールのエアギャップの変化を測定します。 ただし、ランドローバーのエンジンには元々クランクシャフトポジションセンサーが搭載されていないため、パルスホイールがありません。 したがって、パルスホイールを後から取り付ける必要がありました。 パルスホイールの位置と位置には多くの考慮が払われました。 可能性としては次のようなものが考えられます。
- クランプまたはボルト接続によってクランクシャフト プーリーの外側に取り付けられる 36 個の歯を持つディスク。
- 現在のクランクシャフトプーリーの歯をフライス加工して調整します。
36-1 または 60-2 パルスホイールを使用するのが一般的です。 60 歯パルスホイールは主に大径用に使用されます。 歯幅の関係で36-1が適しています。 パルスホイールの高さの移動をできるだけ少なくすることが非常に重要です。 高さの変化は、センサーとパルスホイールの歯の間の磁場の変化を意味します。 これはエンジンの動作に悪影響を与える可能性があります。 これは当然防止しなければなりません。 したがって、現在のクランクシャフトプーリーを調整することが望ましいと考えられます。 既存のクランクシャフトプーリーの外周をフライス盤で加工します。 材料を除去することによりノッチが作成されています。 残りの 36 個の歯は、センサーが磁場の変化を測定できるようにするために機能します。 基準点のために歯が削られています。 下の写真は、加工されたクランクシャフトプーリーを示しています。
研削歯はパルスホイールの上部、センサーのすぐ下に見えます。 クランクシャフトがこの位置にあるとき、シリンダー 1 と 4 のピストンが TDC にあることを意味するのではなく、これらのピストンが TDC の 90 度前にあることを意味します。これは 9 つの歯 (360/36) に相当します。 欠けた歯が通り過ぎる瞬間、MegaSquirt はすぐに点火を開始する必要があるという信号を受け取ります。 その時点から、点火コイルをいつ作動させる必要があるかが計算されます。 動作条件が変化すると、プレイグニッションの時間もこの基準点に基づいて決定されます。

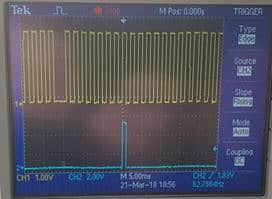
オシロスコープからの画像 (画像を参照) は、点火コイル制御信号 (下) と比較したクランクシャフト信号 (上) を示しています。 点火コイルへの制御パルスは、欠落した歯の後の 10 番目の歯で形成されます。 エンジンがアイドリングしているとき、点火は 1 度進み、これは 90 歯に相当します。 これは、除去した歯と実際の上死点との間の 9 度 (XNUMX 歯) に相当します。
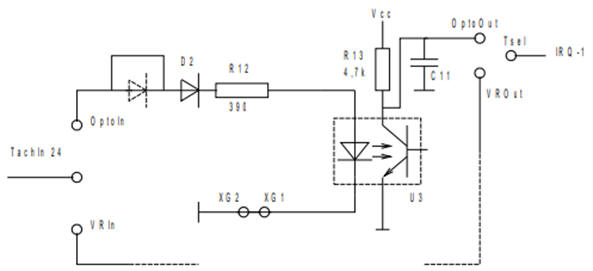
MegaSquirt でホール センサー回路を組み立てるには、コンデンサ C11、抵抗 R12 および R13、ダイオード D2、およびフォトカプラ U3 を取り付ける必要があります (下図を参照)。 ホール センサーからの信号は、図 105 の「オプトイン」の下の図に入ります。 信号はダイオードと抵抗を介して、いわゆるフォトカプラに到着します。 このコンポーネントは破線で示されています。 フォトカプラは、点灯時に左側の LED が右側のフォトトランジスタを導通させる小さな集積回路です。 フォトカプラは、制御部分とスイッチング部分の間に機械的または電気的接続のないスイッチとして見ることができます。
フォトカプラ内のトランジスタが導通すると、Vcc からグランドに少量の電流が流れる可能性があります。 この時点で、「Opto Out」の電圧は 0 ボルトです。 トランジスタが導通していない場合、電流は存在しないため、抵抗 R13 の両端の電圧降下はありません。 「オプトアウト」の電圧は 5 ボルトになります。
フォトカプラを使用することにより、ダイオードとフォトトランジスタの間にガルバニック分離が行われます。 降伏電圧は通常 5 kV を超えるため、危険な干渉電圧がマイクロコントローラ回路に侵入することがなくなります。
MAPセンサー:
MAP センサー (マニホールド絶対圧センサー) は、インテークマニホールド内の圧力を測定します。 MegaSquirt は、この圧力、エンジン速度、入口温度を使用して、エンジンに入る空気の量を計算します。 ランドローバーのエンジンでは、絶対圧(外気圧)または負圧を測定します。 自ら空気を吸う自然吸気エンジンです。 ターボを備えたエンジンは、吸気マニホールド内の過圧に対処する必要があります。 MAP センサーの測定範囲は通常 0,2 ~ 1.1 bar です。
インテークマニホールド内の圧力と、スロットルバルブの開度 (スロットルポジションセンサーで測定) およびエンジン速度によって、エンジン負荷を決定できます。 MAFセンサー(マニホールドエアフロー)がないため、吸入空気量はエンジンデータとインテークマニホールド内の負圧に基づいて計算されます。 MAF センサーはエンジン用に設計されていないため、信号の信頼性が低いため、使用しないことが決定されました。 設定をインテークマニホールドの特性に合わせるのは複雑です。 これには多くの補正係数が必要です。
使用した MPX4250AP MAP センサーを図に示します。 MegaSquirt 回路基板には、このタイプの MAP センサー用の接続オプションが標準装備されています。 このセンサーは構築キットにも標準として含まれています。 理論混合比(燃料 14,68 kg に対して空気 1 kg)を達成しようとするため、噴射される燃料の量は、とりわけ存在する空気の量に依存します。 MAF センサーと MAP センサーの両方を使用しないというオプションもありました。 引き込まれる空気の量は、いわゆる Alpha-N 規制に従って決定されます。 存在する空気の量を決定するガスバルブの位置が考慮されます。 ただし、これは MAP センサーよりも精度が低いため、これは選択されませんでした。 このプロジェクトでは、スロットル ポジション センサーは加速の強化のみに使用されます。

冷却水温度センサー:
古典的なセットアップでは、エンジン ブロックに温度センサーはありません。 エンジンには冷却水温度が高温になった場合にダッシュボードライトを点灯する機能を備えたバイメタルが標準装備されています。 エンジン管理システムは冷却液と吸気の温度を考慮するため、NTC 抵抗器を改造することが決定されました。 NTC 抵抗器には負の温度係数があります。 これは、温度が上昇すると抵抗値が減少することを意味します。 選択した冷却水温度センサーは、摂氏 2,5 度で抵抗値が 25 キロオームのセンサーです。 抵抗変化は最も重要な温度範囲で最大になります。 正しい温度を計算するには、NTC 抵抗の特性をマッピングする必要があります。
抵抗変化は、0⁰C ~ 60⁰C の温度範囲で変化すると最も大きくなります。 これは、特性の経過から見ることができます。 上記の温度範囲では約 5kΩ の抵抗減少が見られますが、T ≥ 60⁰C では抵抗はほとんど減少しません。 場合によっては、60°C を超える温度も測定することが望ましい場合があります。 これを可能にするために、内部バイアス抵抗を特定の温度で異なる値のバイアス抵抗に切り替えることができます。 これにより、60 つの NTC 特性が生成されます。 しかし、このプロジェクトでは冷却水温度はコールドスタート濃縮のみに使用され、XNUMX℃以上ではほとんど使用されません。
低温も最も興味深いものです。 コールドスタートの強化はここで行われます。 エンジンが冷えているときは、インジェクターが作動する時間が長くなります。 エンジンが十分に暖まると(T ≥ 60⁰C)、濃縮はますます少なくなります。 T = 90⁰C からは、参照フィールドの設定値に従って注入戦略が実行されます。 参照フィールドにはデフォルト値が入力されます。 低温でのコールドスタート濃縮などの外部要因が、この基準値に対する補正係数となります。 MegaSquirt は冷却水の温度を考慮しなくなりました。
ラムダセンサー:
排気ガス中の空燃比を測定するラムダセンサー(センサー)が排気ガスに取り付けられています。 ラムダ センサーには、AFR テーブルと VE テーブルを完成させることで、後の段階でエンジン管理を「調整」する重要なタスクがあります。 理想的な混合比、および濃縮または濃縮の有用性と必要性についての洞察を得るために、まず化学量論的な混合比、濃縮および減少を定義します。
化学量論混合比は、空気中の酸素がすべて使用される、空気と燃料の比率を示します。 これは、比率 14,68:1 (空気 14,7 kg 対ガソリン 1 kg として四捨五入) の場合に当てはまります。 次に、λ = 1 について説明します。
ラムダ値は、動作条件によって異なる場合があります。
- 濃縮: λ < 1;
- 貧しい: λ > 1。
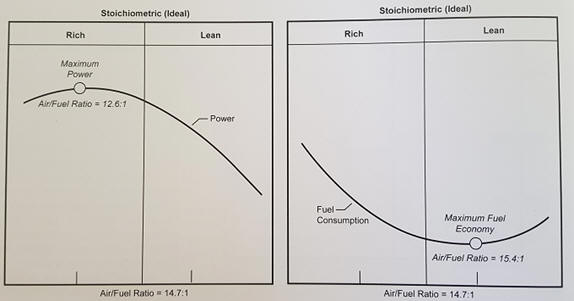
λ = 0,8 まで濃縮すると、ガソリン 11,76 kg に対して空気 1 kg の混合比が適用されることを意味します。 そのため、1kgの燃料を燃焼させるために利用できる空気の量が少なくなります。 混合物の濃縮または減耗は、常に爆発限界内にとどまらなければなりません。 エンジンがより多くのパワーを供給する必要がある場合、強化が行われます。 より濃厚な混合物も冷却効果をもたらします。 一方、混合気を希薄にすると燃費が良くなります。 下の画像は、最大電力と最低燃料消費量を示す XNUMX つのグラフを示しています。
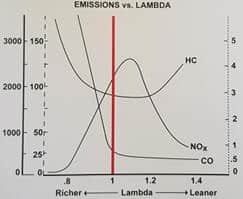
ラムダ値はパワーと燃料消費量だけでなく、排気ガスにも影響します。 混合物をより豊富にすると、NOx 含有量は確実に低くなりますが、CO および HC の排出量も増加します。 混合気が希薄になると、燃料粒子がさらに離れるため、燃焼は最適ではなくなります。 その結果、HC排出量も増加します。 下の画像は、ラムダ値に関連する放出を示しています。 触媒を使用する場合、噴射が常にリッチとリーンの間で交互に行われるようにすることが望ましい。 濃厚混合気では酸素欠乏の結果として CO が生成され、触媒が NOx を還元します。 希薄混合気には過剰な酸素が含まれており、CO と HC が酸化されます。
ラムダ センサーには 8,0 つのタイプがあります。 ジャンプセンサーとブロードバンドセンサー。 MegaSquirt は両方のタイプをサポートします。 ただし、VE テーブルを設定する場合、ジャンプ センサーは適さないため、ブロードバンド センサーを使用することにしました。 VE テーブルは、測定された AFR に VE 値を調整することで設定されます。 VE 値は原則として計算によって入力でき、主にトルク曲線に基づいて入力できますが、AFR はすぐにジャンプ センサーの範囲を超えます。 ブロードバンドセンサーは測定範囲が広いため、ソリューションを提供します。 1,4 ~ XNUMX の AFR を測定できます。 エンジン稼働時には、ほとんどの場合、混合気組成がこの測定範囲内にあるため、広帯域センサーは VE テーブルの設定に適しています。 広帯域センサーなしでチューニングすることは事実上不可能です。
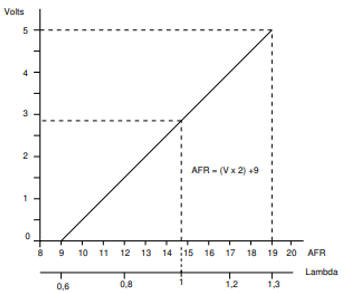
MegaSquirt には内部ラムダ コントローラーがありません。 ブロードバンド センサーのプロパティがわかったら、TunerStudio プログラムのテーブルに入力できます。 他の場合には、外部コントローラーを備えた広帯域センサーが必要です。 出力電圧は外部コントローラーによってリニア化されています。 コントローラーから MegaSquirt への出力電圧は 0 ~ 5 ボルトであり、ラムダ値と電圧の関係は線形です。 電圧値は MegaSquirt 内でラムダ値に変換されます。 図は線形勾配のグラフを示しています。
Volgende: アクチュエーター.