科目:
- はじめに
- 電動モーターの動作原理
- カーボンブラシ付き DC 電動モーター
- カーボンブラシのない DC 電動モーター
導入:
車内には電気モーターが搭載されている場所が増えています。 電気モーターでは、電流が動きと熱に変換されます。 電動モーターはミラーやシート調整に使用されていますが、ワイパー機構のワイパーモーターやスターターモーターとしても使用されています。 これらの電気モーターは 12 ~ 14 ボルトの電圧で動作します。 このページでは、内部および外部の電気モーターに限定します。
電気モーターは、ハイブリッド車や完全電気自動車でも (部分的に) 電気推進力を提供します。 このタイプの電気モーターについては、次のページで説明されています。 HV 電気モーター。
DC 電気モーターは次のように分類できます。
- カーボンブラシ付き電動モーター(電磁界およびアーマチュア)
- 直列電気モーター;
- 並列電気モーター。
- ブラシレス電気モーター。
電動モーターの動作原理:
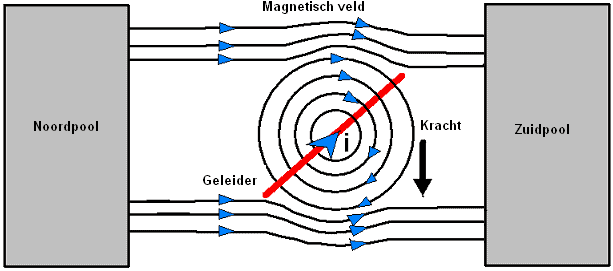
電気モーターでは、電流が回転運動に変換されます。 この動きは、XNUMX つの磁極が互いに引き付けたり反発したりすることによって引き起こされます。
- 北極と南極は互いに引き合います。
- XNUMX つの北極は互いに反発します。
- XNUMX つの南極は互いに反発します。
磁石には逆の電荷を持つ N 極と S 極があります。 その磁石が半分に壊れると、突然 XNUMX つの別々の極ができるのではなく、両方とも N 極と S 極を持つ XNUMX つの新しい磁石ができます。
ハウジングには複数の磁極(N極とS極)が固定されています。 N極とS極の間には磁場があります。 磁界の変化により出力軸(アーマチュア)が回転します。
電気モーターでは、(通常は) 永久磁石または電磁石を使用して、同じ名前の XNUMX つの極が常に向かい合って配置されます。 同じ名前の極が互いに反発し合うため、動きが生まれます。
カーボンブラシ付き DC 電気モーター:
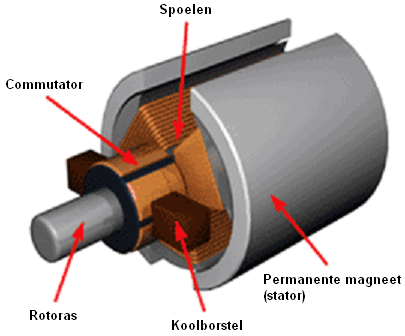
自動車技術におけるほぼすべての電気モーターは、永久磁石とカーボン ブラシを備えた DC モーターとして設計されています。 このタイプの電気モーターには次の磁石が使用されています。
- 永久磁石 (N 極と S 極が XNUMX つ): それらの間には定常磁場があります。
- コイル:この中に電磁場が発生します。 コイル内に回転電磁場が発生します。
永久磁石はローターの左右に配置されており、XNUMX つの N 極と XNUMX つの S 極で構成されます。 この N 極と S 極の間には、電気モーターが動作しているときも停止しているときにも変化しない定常磁場があります。
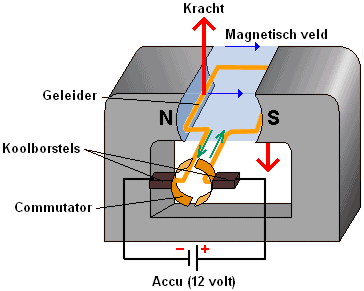
コイルに電流が流れるとすぐに、コイル内に回転電磁場が発生します。 電流は整流子を介してカーボンブラシによって供給および除去されます。
電流の方向の反転は整流によって行われます。XNUMX つのカーボン ブラシがプラス側とマイナス側で構成される整流子の上を引きずります。 プラス側のカーボンブラシは導体に電流を運びます(図の緑色の矢印)。 電流はマイナス側のカーボンブラシを介して導体から出ます。 導体を流れる電流は電磁場を生成します。
結果として生じる電機子 (導体) の磁気と磁界 (永久磁石) の間に力が発生します (画像の赤い矢印)。 この力により、アーマチュアと整流子がその軸を中心に回転します。 次に、カーボン ブラシが整流子の他の部分に衝突し、電機子の電流の方向が逆転します。 磁場と力が同じ方向に蓄積されるため、アーマチュアは再びその軸の周りを回転します。
カーボンブラシのプラスとマイナスを逆にすることで、電気モーター(アーマチュアと読みます)の回転方向を変えることができます。
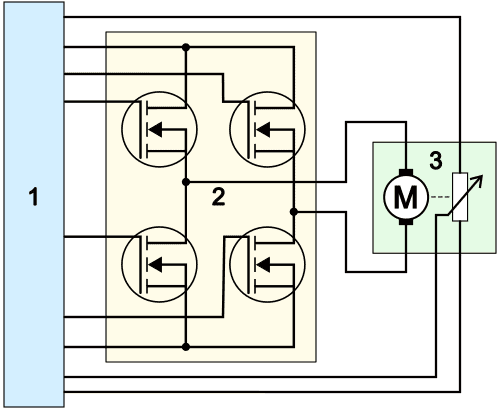
プラスとマイナスの交換は、H ブリッジを使用して実現できます。
- ECU (1) は 4 つのトランジスタまたは FET (XNUMX) のうち XNUMX つを同時に制御します。
- FET (2) は電気モーター (3) にプラスとアースを与えます。 どの XNUMX つの FET がオンになるかに応じて、上部のカーボン ブラシがプラスで下部がグランドになるか、その逆になります。
- 電気モーターの隣にあるポテンショメータは、回転の位置と方向を記録します。 すべての電気モーターにポテンショメータが装備されているわけではありません。
ページを参照してください Hブリッジ H ブリッジの可能な設計とスイッチング方法については、
カーボンブラシなしの DC 電気モーター:
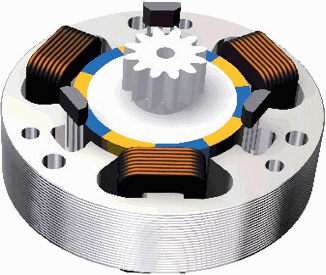
ブラシレス直流 (DC) モーターは同期モーターです。 カーボンブラシに代わって電気制御が採用されました。 このタイプの電気モーターは、永久磁石を備えた同期 AC モーターと非常によく似ています。 電気自動車のパワートレイン。 XNUMX つのモーターの主な違いは制御です。AC モーターは変調された正弦波交流電圧で制御され、DC モーターは方形波電圧で制御されます。
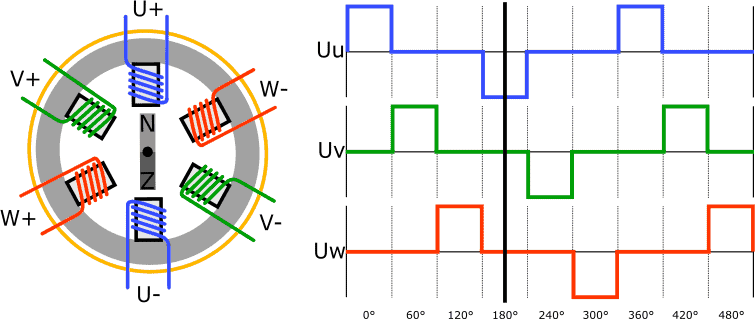
多くの場合、ステーターには XNUMX つまたは XNUMX つのコイル (U、V、W) が含まれており、ローターは永久磁石です。 下の図は、DC モーターの概略構造と XNUMX つのコイルを通る電圧の推移を示しています。 実際には、ローターの位置を決定するために、極の間にいくつかのホール センサーが取り付けられています。
制御ユニットは、ローターの位置に基づいてどのコイルを制御するかを決定します。
次の画像では、U+ コイルが通電されています。 コイルを極に巻き付ける方法によって、それが N 極になるか S 極になるかが決まります。 この例では、U+ が北極、U- が南極です。
ローターは永久磁石として設計されています。 前の段落で説明したように、ローターはコイルを通る磁場の変化の結果として位置決めまたは回転します。
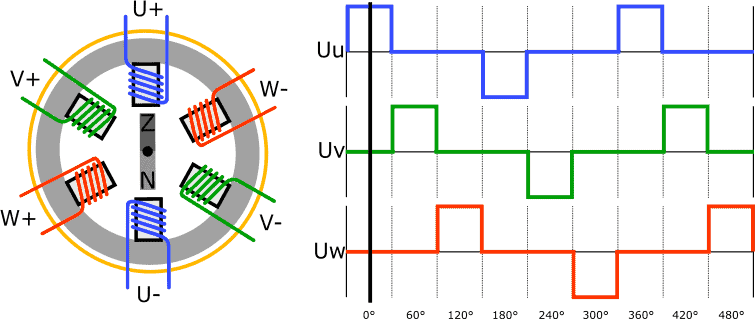
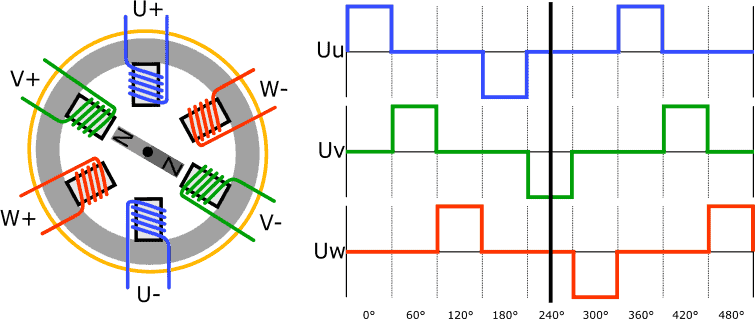
ローターを前の図に示した位置から反時計回りに回転させるには、V コイルに通電します。
V+ は N 極、V- は S 極になります。 永久磁石ローターが回転します。
N 極と S 極は互いに引き付け合い、磁石の反対側の S 極と N 極も同様です。
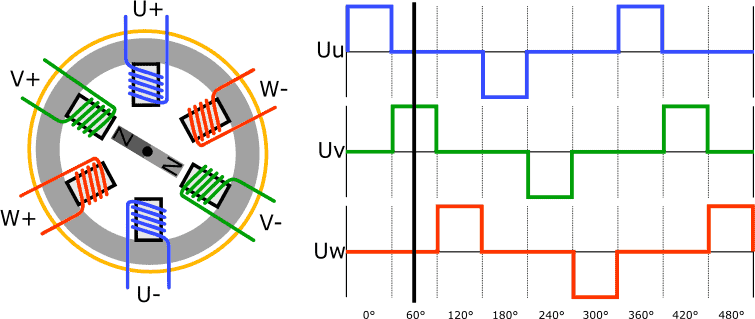
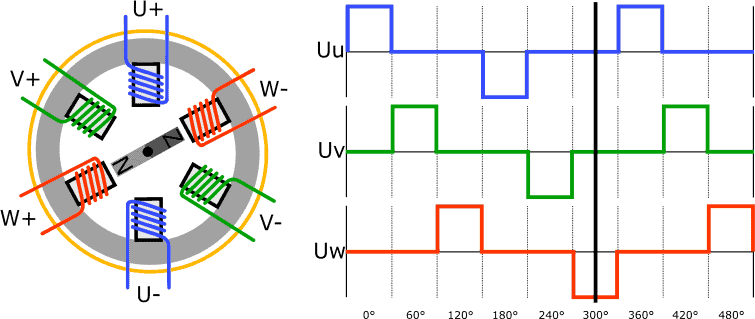
ここで、W コイルが通電されてローターがさらに 60 度回転します。
W+ コイルは N 極、W- コイルは S 極になります。 ローターが回転し、新しい位置に配置されます。
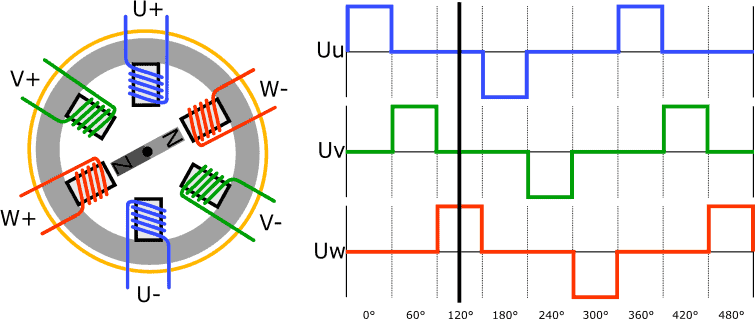
次の画像のローターは、最初の状況から 180 度回転しています。 最初の画像では南極が上を向いていました。 今はそれが北極です。
U+ コイルと U- コイルの極性が逆になり、コイルに逆方向に電流が流れます。 これにより、U+ が南極、U- が北極になります。
永久磁石を備えたローターは磁場の変化によってさらに回転します。
ローターを再度 60 度回転するには、V- を N 極、V+ を S 極にします。 ローターは新しい位置に配置されます。
コイル内の磁場の変化により、ローターは再び 60 度回転します。
W- コイルは N 極、W+ は S 極です。
上記の XNUMX つの状況では、XNUMX つのコイルが常に同時に通電されます。 また、XNUMX 個のコイルではなく XNUMX 個のコイルを備えたブラシレス DC モーターもよく見かけます。 XNUMXつのコイルの場合、U、V、Wコイルにも順番に通電しますが、極性は変わりません。
ブラシレスDCモーターは、始動、中速、高速のいずれにおいても高トルクが要求される用途に適した強力なモーターです。 ブラシレス DC モーターとステッピング モーターはよく混同されます。 これは驚くべきことではありません。なぜなら、これらのモーターの動作と制御には多くの類似点があるからです。両方のモーターは、永久磁石を使用してコイルとローターの間に磁界を生成することによって駆動されます。 ただし、用語に加えて、両方のエンジンには主に用途、つまり材料の選択に大きな違いがあります。
ステッピングモーターは基本的にはブラシレスDCモーターですが、別の分野で応用されています。 DC モーターは主に高速での長時間運転に使用されますが、正確な位置での調整が最も重要な用途ではステッピング モーターが使用されます。
図示の DC モーターは、ローターが 60° 回転するごとに制御されます。 各制御間で 30 つのコイルに同時に通電し、中間位置を取得すると、この角度は 1,8° にまで減少する可能性があります。 ただし、ステッピング モーターは 0,9° ~ XNUMX° の増分で調整できます。 これは、ステッピング モーターが非常に正確な位置に適していることを示しています。
各種バージョン、ECUによる制御方式、アプリケーションについてはこちらのページでご覧いただけます。 ステッピングモーター.
