Soggetti:
- Determinare e installare i sensori per il sistema di gestione del motore
- Sensore di posizione dell'albero motore
- Ruota a impulsi
- Sensore mappa
- Sensore della temperatura del liquido di raffreddamento
- Sonda lambda
Determinare e installare i sensori per il sistema di gestione del motore:
Il sistema di gestione del motore richiede una serie di sensori. I sensori fungono da “input” del sistema. I sensori convertono una grandezza fisica in un segnale elettrico che può essere elaborato da un computer, in questo caso il MegaSquirt.
Il processo di assemblaggio del MegaSquirt deve tenere conto dei componenti da montare sul motore, poiché la struttura del MegaSquirt può differire.
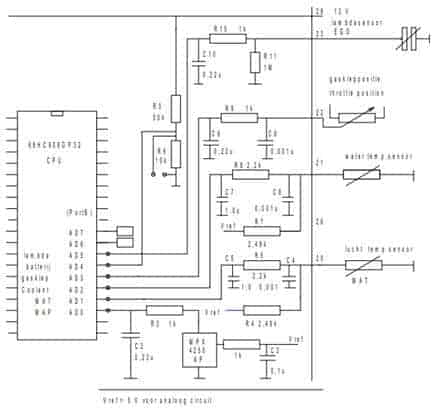
La figura mostra i diversi circuiti dei sensori in cui si trovano questi componenti. I segnali di ingresso mostrati in figura provengono dalla sonda lambda, dal sensore di posizione farfalla, dal sensore di temperatura del liquido di raffreddamento e dal sensore di temperatura dell'aria.
Oltre ai sensori, lo schema contiene anche una serie di resistori e condensatori. La composizione di questi componenti forma dei filtri; Questi filtri servono a catturare segnali di interferenza e rumore. Se il segnale del sensore viene distorto dal rumore, ciò può avere conseguenze importanti sul controllo degli attuatori e quindi anche sul funzionamento del motore.
Sensore di posizione dell'albero motore:
Un input importante per il sistema di gestione del motore è la velocità dell'albero motore.
La velocità dell'albero motore viene misurata utilizzando un sensore di posizione dell'albero motore e una ruota fonica. Il sensore di posizione dell'albero motore ha due importanti funzioni:
- La velocità dell'albero motore può essere determinata in base alla frequenza del segnale;
- Il dente mancante nella ruota fonica indica la posizione dell'albero motore in cui i pistoni dei cilindri 1 e 4 si trovano alcuni gradi prima del PMS.
La velocità del motore influenza il controllo degli iniettori e l'accensione. Il dente mancante nella ruota fonica 36-1 è importante per determinare i tempi di accensione e iniezione. Come sensore di velocità si è deciso di utilizzare un sensore Hall e non il generatore di impulsi a induzione. Un sensore induttivo genera una tensione alternata che deve essere convertita in una tensione continua nel controller MegaSquirt. Un sensore Hall genera una tensione ad onda quadra, che viene amplificata a una tensione di 5 o 12 volt con un resistore pull-up interno o esterno. Ciò rende il sensore Hall più adatto a formare un segnale affidabile. Questa scelta deve essere fatta preventivamente prima di montare il MegaSquirt; entrambi i sensori richiedono una struttura circuitale diversa.
Ruota a impulsi:
Il sensore di posizione dell'albero motore misura la variazione del traferro di una ruota fonica montata sul motore. Tuttavia, il motore Land Rover originariamente non dispone di un sensore di posizione dell'albero motore e quindi di una ruota fonica. La ruota fonica doveva quindi essere installata successivamente. Si è pensato molto alla posizione e alla posizione della ruota fonica. Le possibilità erano:
- Un disco con 36 denti fissato all'esterno della puleggia dell'albero motore mediante un collegamento a morsetto o bullone.
- Regolazione dell'attuale puleggia dell'albero motore mediante fresatura dei denti della puleggia.
Solitamente si utilizza una ruota fonica da 36-1 o 60-2. La ruota fonica da 60 denti viene utilizzata principalmente per i diametri maggiori. Il 36-1 è adatto all'uso grazie alla larghezza dei denti. È molto importante che la ruota fonica abbia la minima corsa in altezza possibile. Una variazione di elevazione significa una variazione del campo magnetico tra il sensore e i denti della ruota fonica. Ciò può avere conseguenze negative sul funzionamento del motore. Questo ovviamente deve essere evitato. Era quindi preferibile regolare l'attuale puleggia dell'albero motore. Il bordo esterno della puleggia dell'albero motore esistente viene lavorato su una fresatrice. Le tacche sono state create rimuovendo materiale. I restanti 36 denti servono per consentire al sensore di misurare le variazioni dei campi magnetici. Un dente è stato levigato come punto di riferimento. L'immagine sotto mostra la puleggia dell'albero motore lavorata.
Il dente macinato è visibile nella parte superiore della ruota fonica, proprio sotto il sensore. Quando l'albero motore è in questa posizione non significa che i pistoni dei cilindri 1 e 4 sono al PMS, ma che questi pistoni sono 90 gradi prima del PMS, che corrisponde a 9 denti (360/36). Nel momento in cui passa il dente mancante, il MegaSquirt riceve un segnale che l'accensione dovrebbe avvenire a breve. Da quel momento in poi viene calcolato quando la bobina di accensione deve essere attivata. In base a questo punto di riferimento, al variare delle condizioni operative, viene determinato anche il momento della preaccensione.

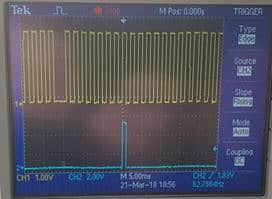
L'immagine dell'oscilloscopio (vedi immagine) mostra il segnale dell'albero motore (in alto) rispetto al segnale di controllo della bobina di accensione (in basso). L'impulso di comando alla bobina di accensione si forma all'ottavo dente dopo quello mancante. Quando il motore è al minimo, l'accensione è anticipata di 10 gradi, ovvero 1 dente. Ciò corrisponde ai 90 gradi (9 denti) tra il dente rimosso e il punto morto superiore effettivo.
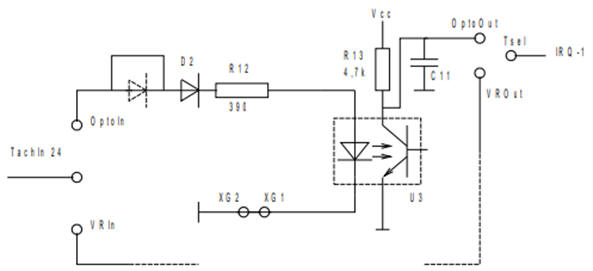
Per assemblare il circuito del sensore Hall nel MegaSquirt, è necessario installare il condensatore C11, i resistori R12 e R13, il diodo D2 e l'accoppiatore ottico U3 (vedere la figura sotto). Il segnale proveniente dal sensore Hall entra nel diagramma di figura 105 sotto “Opto in”. Il segnale arriva al cosiddetto fotoaccoppiatore tramite il diodo e il resistore. Questo componente è indicato con una linea tratteggiata spezzata. L'accoppiatore ottico è un piccolo circuito integrato in cui il LED sul lato sinistro conduce il fototransistor sul lato destro quando è acceso. L'accoppiatore ottico può essere visto come un interruttore senza collegamenti meccanici o elettrici tra le parti di controllo e di commutazione.
Quando il transistor nell'accoppiatore ottico è conduttivo, una piccola corrente può fluire da Vcc a terra. In quel momento su “Opto Out” è presente una tensione di 0 volt. Se il transistor non conduce, non c'è corrente e quindi nessuna caduta di tensione sul resistore R13. La tensione su “Opto out” è quindi di 5 volt.
Utilizzando un fotoaccoppiatore viene effettuata una separazione galvanica tra il diodo e il fototransistor. Le tensioni di disturbo pericolose vengono così tenute lontane dal circuito del microcontrollore, poiché la tensione di rottura è solitamente maggiore di 5 kV.
Sensore MAP:
Un sensore MAP (sensore pressione assoluta collettore) misura la pressione nel collettore di aspirazione. Il MegaSquirt utilizza questa pressione, la velocità del motore e la temperatura di ingresso per calcolare la quantità di aria che entra nel motore. Con il motore Land Rover verrà misurata una pressione assoluta (la pressione dell'aria esterna) o una pressione negativa. Questo è un motore ad aspirazione naturale che aspira la propria aria. I motori dotati di turbo devono fare i conti con la sovrappressione nel collettore di aspirazione. Il campo di misura di un sensore MAP è solitamente compreso tra 0,2 e 1.1 bar.
La pressione nel collettore di aspirazione, insieme all'angolo di apertura della valvola a farfalla (misurato con il sensore di posizione della farfalla) e al numero di giri del motore, possono determinare il carico del motore. A causa della mancanza di un sensore MAF (Manifold Air Flow), la quantità di aria aspirata viene calcolata in base ai dati del motore e alla pressione negativa nel collettore di aspirazione. Si è deciso di non utilizzare un sensore MAF, perché il segnale è meno affidabile non essendo predisposto per il motore. Far corrispondere le impostazioni alle proprietà del collettore di aspirazione è complesso. A questo scopo sono necessari molti fattori di correzione.
Il sensore MAP MPX4250AP utilizzato è mostrato in figura. La scheda MegaSquirt è dotata di serie di opzioni di collegamento per questo tipo di sensore MAP. Anche questo sensore è incluso di serie nel kit di costruzione. La quantità di carburante iniettato dipende tra l'altro dalla quantità di aria presente, poiché si cerca di ottenere un rapporto di miscelazione stechiometrico (14,68 kg di aria per 1 kg di carburante). C'era un'opzione per non utilizzare entrambi i sensori MAF e MAP. La quantità di aria aspirata verrebbe quindi determinata secondo la cosiddetta normativa Alpha-N. Viene presa in considerazione la posizione della valvola del gas, che è determinante per la quantità di aria presente. Tuttavia, questo è meno preciso di un sensore MAP, quindi non è stato scelto. In questo progetto, il sensore di posizione della valvola a farfalla viene utilizzato solo per l'arricchimento dell'accelerazione.

Sensore di temperatura del liquido di raffreddamento:
Nella configurazione classica non sono presenti sensori di temperatura sul blocco motore. Il motore è dotato di serie di un bimetallo, che ha la funzione di accendere la luce del cruscotto se la temperatura del liquido di raffreddamento è troppo elevata. Poiché il sistema di gestione del motore tiene conto della temperatura del liquido di raffreddamento e dell'aria aspirata, si è deciso di aggiornare le resistenze NTC. Un resistore NTC ha un coefficiente di temperatura negativo. Ciò significa che il valore della resistenza diminuisce all'aumentare della temperatura. Il sensore della temperatura del liquido di raffreddamento scelto è un sensore che ha un valore di resistenza di 2,5 kiloohm a 25⁰ Celsius. La variazione di resistenza è maggiore nell'intervallo di temperatura più importante. Le proprietà della resistenza NTC devono essere mappate per calcolare una temperatura corretta.
La variazione della resistenza è maggiore con una variazione dell'intervallo di temperatura compreso tra 0⁰C e 60⁰C. Ciò può essere visto dall'andamento della caratteristica; nell'intervallo di temperature indicato si verifica una diminuzione della resistenza di circa 5 kΩ, mentre a T ≥ 60⁰C la resistenza difficilmente diminuisce. In alcuni casi è auspicabile misurare anche temperature superiori a 60°C. Per rendere ciò possibile, il resistore di polarizzazione interno può essere commutato su un resistore di polarizzazione di valore diverso ad una determinata temperatura. Ciò produce due caratteristiche NTC. Tuttavia, in questo progetto la temperatura del liquido di raffreddamento viene utilizzata esclusivamente per l'arricchimento con avviamento a freddo, che difficilmente viene utilizzato al di sopra dei 60°C.
Anche le basse temperature sono le più interessanti; l'arricchimento con partenza a freddo avrà luogo qui; l'iniettore rimane attivato più a lungo quando il motore è freddo. Quando il motore si è riscaldato sufficientemente (T ≥ 60⁰C), l'arricchimento avviene sempre meno. A partire da una T = 90⁰C la strategia di iniezione funziona secondo i valori impostati nel campo di riferimento. Il campo di riferimento è un valore predefinito inserito. Fattori esterni, come un arricchimento con avviamento a freddo a bassa temperatura, costituiscono un fattore di correzione per questo valore standard. Il MegaSquirt non tiene più conto della temperatura del liquido di raffreddamento.
Sonda lambda:
Nello scarico è montata una sonda lambda (sensore) che misura il rapporto aria/carburante nei gas di scarico. La sonda lambda ha l'importante compito di “sintonizzare” successivamente la gestione del motore completando le tabelle AFR e VE. Per comprendere meglio il rapporto di miscelazione ideale e l'utilità e la necessità di arricchire o impoverire, vengono innanzitutto definiti il rapporto di miscelazione stechiometrico, l'arricchimento e l'esaurimento.
Il rapporto di miscelazione stechiometrico indica il rapporto tra aria e carburante in cui viene utilizzato tutto l'ossigeno dell'aria. Questo è il caso del rapporto 14,68:1 (arrotondato come 14,7 kg di aria per 1 kg di benzina). Si parla allora di λ = 1.
Il valore lambda può variare in diverse condizioni operative:
- Arricchimento: λ < 1;
- Impoverire: λ > 1.
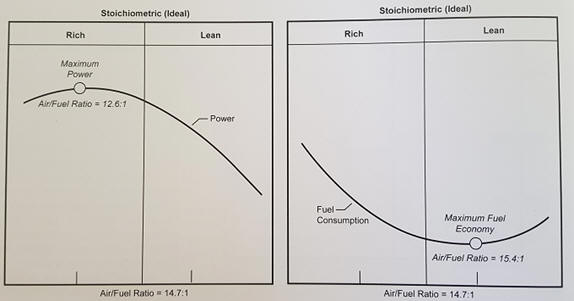
Arricchire a λ = 0,8 significa che si applica un rapporto di miscelazione di 11,76 kg di aria per 1 kg di benzina. Quindi c'è meno aria disponibile per bruciare 1 kg di carburante. L'arricchimento o l'impoverimento della miscela devono sempre rimanere entro i limiti di esplosione. L'arricchimento avviene quando il motore deve erogare più potenza. Una miscela più ricca fornisce anche il raffreddamento. Una miscela magra, invece, garantisce un miglior consumo di carburante. L'immagine seguente mostra due grafici che mostrano la potenza massima e il consumo di carburante minimo.
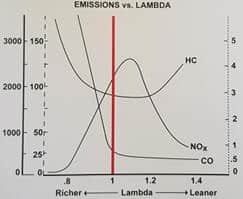
Il valore lambda non influisce solo sulla potenza e sul consumo di carburante, ma anche sulle emissioni di scarico. Una miscela più ricca garantisce un contenuto di NOx inferiore, ma anche emissioni di CO e HC più elevate. Con una miscela più magra, le particelle di carburante sono più distanziate, per cui la combustione non è più ottimale; con il risultato che aumentano anche le emissioni di HC. L'immagine sotto mostra le emissioni relative al valore lambda. Quando si utilizza un catalizzatore, è auspicabile garantire che l'iniezione sia costantemente alternata tra ricca e magra. In una miscela ricca, a causa della carenza di ossigeno, si forma CO, con la quale il catalizzatore riduce gli NOx. Una miscela magra contiene un surplus di ossigeno, che ossida CO e HC.
Esistono due tipi di sonde lambda; il sensore di salto e il sensore a banda larga. Il MegaSquirt supporta entrambi i tipi. Tuttavia, quando si imposta la tabella VE, un sensore di salto non è adatto e si è quindi scelto di utilizzare il sensore a banda larga. La tabella VE viene impostata adattando i valori VE all'AFR misurato. Sebbene in linea di principio i valori VE possano essere inseriti tramite calcoli e in gran parte basati sulla curva della coppia, l'AFR si trova rapidamente oltre la portata del sensore di salto. Un sensore a banda larga offre una soluzione grazie al suo ampio campo di misura; può misurare un AFR compreso tra 8,0 e 1,4. La composizione della miscela si trova quasi sempre in questo intervallo di misurazione quando il motore è in funzione, quindi il sensore a banda larga è adatto per impostare la tabella VE. La sintonizzazione senza il sensore a banda larga è praticamente impossibile.
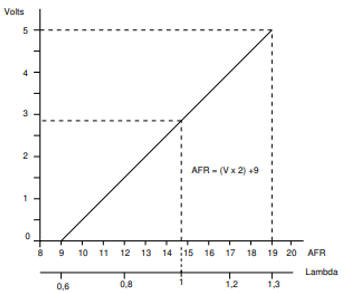
Il MegaSquirt non ha un controller lambda interno. Una volta note le proprietà del sensore a banda larga, è possibile inserirle in una tabella nel programma TunerStudio. In altri casi è necessario un sensore a banda larga con controller esterno. La tensione di uscita è stata resa lineare dal controller esterno. La tensione di uscita dal controller al MegaSquirt è compresa tra 0 e 5 volt, con la relazione tra il valore lambda e la tensione lineare. Il valore della tensione viene convertito in un valore lambda nel MegaSquirt. La figura mostra il grafico con il gradiente lineare.
prossimo: Attuatori.