Conversion des tensions des capteurs analogiques en message numérique
Conversion du signal du générateur d'impulsions en message numérique
Signalisation de sortie
Préface: Dans la plupart des cas, les signaux électriques des capteurs doivent être ajustés avant d'être présentés au processeur. Les actionneurs sont contrôlés de l'autre côté de l'ordinateur. Ce sont souvent des circuits inductifs qui commutent souvent des courants importants. Le matériel permettant d'ajuster les signaux des capteurs et les courants des actionneurs est appelé circuits d'interface. Un circuit d'interface assure la traduction d'une tension analogique en tension numérique.
Capteurs transmettre une tension avec un faible courant. Le circuit d'interface convertit la tension en une valeur numérique (0 ou 1). L'intensité du courant est faible avec un signal de capteur ;
Actionneurs nécessitent un courant plus élevé. Pour assurer la actionneurs de commande, sont situés dans l'ECU sous la forme de (une combinaison de) transistors ou FET, également appelés « pilotes ». Nous en discuterons plus en détail dans la section « signaux de sortie ».
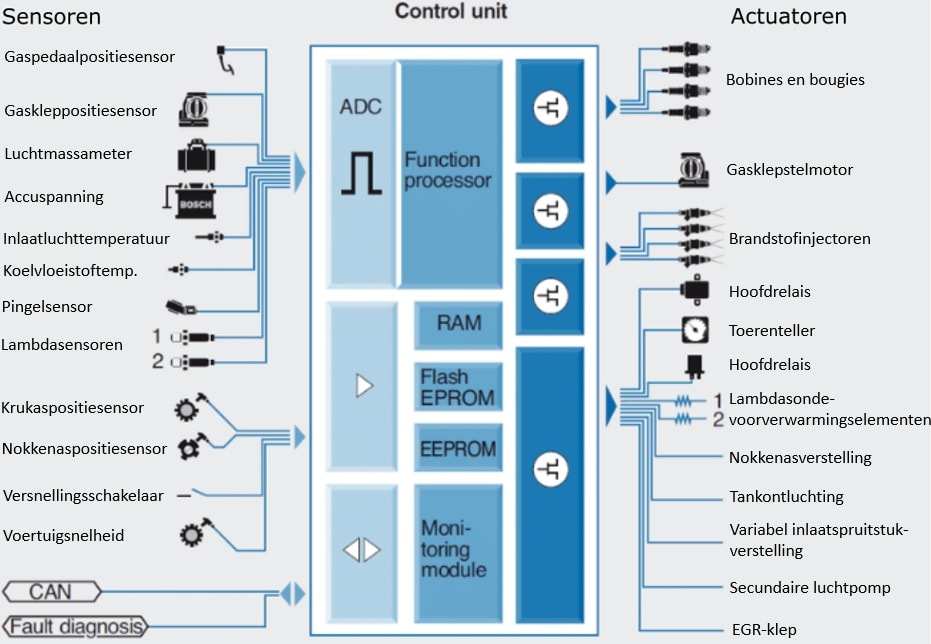
L'image ci-dessous montre les capteurs et actionneurs d'un système de gestion de moteur (essence). Le groupe supérieur de capteurs (du capteur de position de la pédale d'accélérateur aux sondes lambda) relève de la catégorie « analogique ». Cela signifie que les tensions des capteurs entrants doivent d'abord être numérisées dans l'ADC (convertisseur analogique-numérique). Le groupe inférieur de capteurs (du capteur de position du vilebrequin au capteur de vitesse du véhicule) fournit déjà son signal de manière numérique. Les signaux marche-arrêt ou tensions de bloc sont directement appliqués au processeur.
Les actionneurs de droite sont contrôlés par un étage de sortie. Un étage de sortie, également appelé pilote, se compose d'un circuit de plusieurs transistors pour générer une tension et un courant utilisables à partir d'une impulsion de commande provenant de l'ordinateur pour contrôler l'actionneur.
Système de gestion moteur avec capteurs (à gauche) et actionneurs (à droite)
Logique de transistor à transistor (TTL) : Le processeur fonctionne avec des tensions de 5 volts. Les tensions d'entrée et de sortie sont donc limitées à une plage de 0 à 5 volts (niveau TTL, abrégé de Transistor Transistor Logic). Pour les signaux qui s'écartent de ce niveau de tension, un ajustement a lieu dans un circuit d'interface.
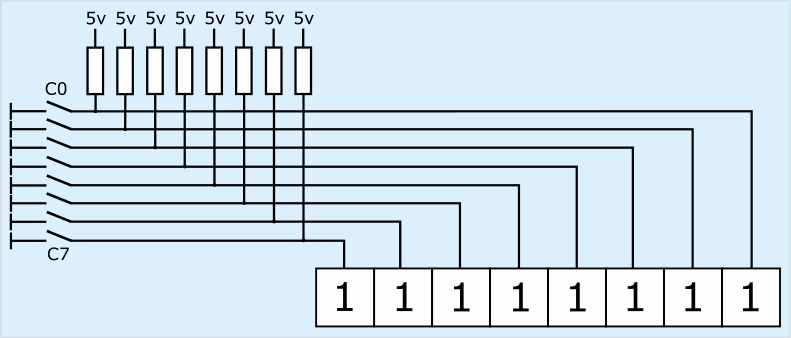
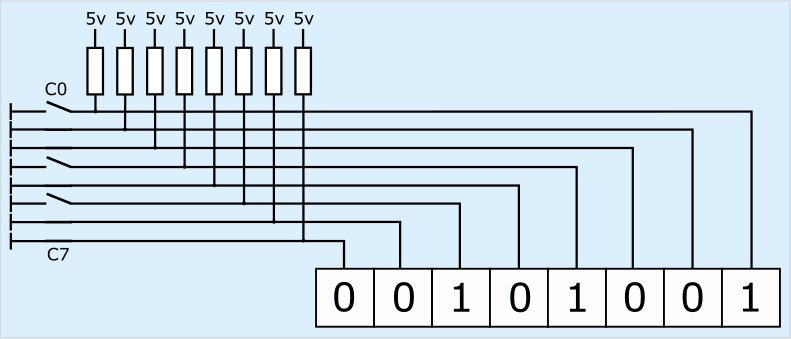
Les images ci-dessous montrent comment un 1 ou un 0 est formé à partir d'une position de commutateur. Au moyen d'une résistance pull-up, la tension de 5 volts fournit un logique 1 sur l'entrée du processeur lorsque l'interrupteur est ouvert. La tension aux bornes de la résistance de rappel n'est alors pas connectée à la masse. Lorsque les interrupteurs se ferment, une chute de tension se produit aux bornes de la résistance de rappel. La tension de 0 volt à l'entrée du processeur est considérée comme logique 0.
Tous les switchs ouverts : 11111111 sur entrée processeur
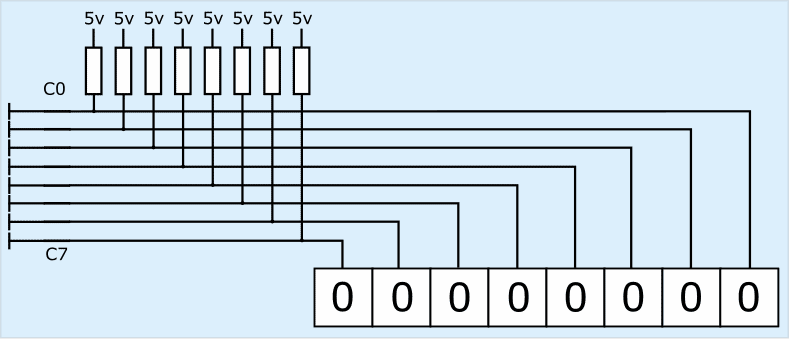
Tous les interrupteurs fermés : 00000000 sur entrée processeur
Une combinaison de commutateurs ouverts et fermés produit une série de uns et de zéros. Sur la figure, le message de 8 bits adressé au processeur est : 00101001.
Avec un processeur 8 bits, les huit bits sont lus simultanément par cycle. Lors du cycle suivant, qui a lieu lors du prochain « tick » de l'horloge (voir le bus système sur la page sur le fonctionnement de l'ECU), une séquence avec huit nouveaux bits suit.
Switchs ouverts et fermés : 00101001 sur entrée processeur
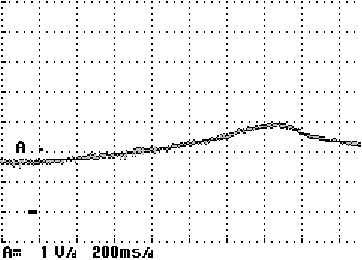
Conversion des tensions des capteurs analogiques en message numérique : Les signaux d'entrée numériques sont traités directement par le processeur. Les signaux analogiques sont d'abord convertis en signal numérique dans le convertisseur A/D. A titre d'exemple, prenons la courbe de tension analogique d'un capteur de pression turbo :
au ralenti, la tension est d'environ 1,8 volts ;
en accélération, la tension monte à près de 3 volts.
Le changement de tension ne peut pas être traité directement dans le processeur. Tout d'abord, la tension mesurée doit être convertie en valeur décimale (0 à 255).
Avec une plage de 0 à 5 volts et une valeur décimale de 0 à 255 (donc 256 possibilités). Un calcul simple montre que si l'on divise 5 volts sur 256 possibilités, des pas de 19,5 mV (0,0195 volts) peuvent être réalisés.
L'exemple ci-dessus montre l'évolution de la tension en fonction du temps d'un capteur de pression turbo. La courbe de tension d'un capteur de température et d'un capteur de position de la pédale d'accélérateur est la même, mais dans un laps de temps différent : chauffer le liquide de refroidissement prend plus de temps que démarrer le turbo.
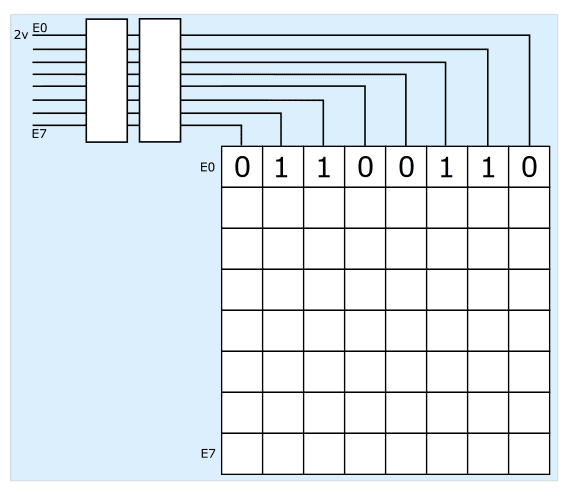
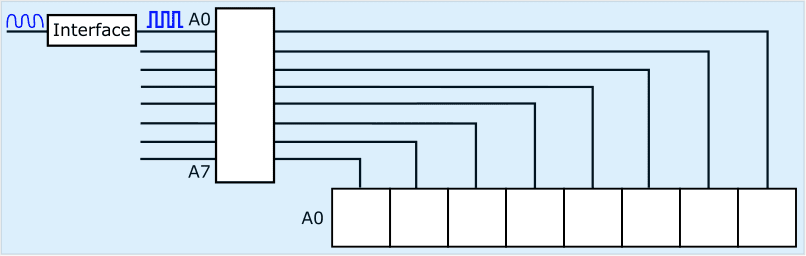
Plus tôt dans cette section, vous trouverez une image montrant une catégorie de signaux analogiques. Celui-ci indique, entre autres, le capteur de température et le capteur de position de la pédale d'accélérateur. La tension analogique est convertie en une unité d'information de 8 bits dans le convertisseur A/D. De nombreux processeurs dotés de plusieurs broches d’entrée n’ont qu’un seul convertisseur A/D. Plusieurs signaux analogiques sont combinés en un seul signal grâce au multiplexage.
Dans cet exemple, nous voyons un convertisseur A/D avec huit entrées. Il y a une tension de 0 volts sur la broche 2. Les broches E1 à E7 peuvent être alimentées en tensions en même temps. Ceux-ci sont convertis un à un en un message numérique par multiplexage.
La tension de 2 volts est convertie en valeur binaire. Avec la formule suivante, nous pouvons convertir la tension analogique en valeur décimale, puis la convertir en valeur binaire :
2v / 5v * 255j = 102j
Ici, nous divisons la tension d'entrée (2 V) par la tension maximale (5 V) et la multiplions par la valeur décimale maximale (255).
En effectuant un calcul ou en effectuant une astuce intéressante, nous pouvons convertir le nombre décimal de 255d en la valeur binaire de 01100110. Voir la page pour cela : binaire, décimal, hexadécimal.
Convertisseur A/D 8 bits
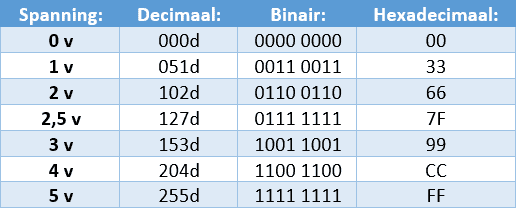
Le tableau suivant présente les valeurs décimales, binaires et hexadécimales associées aux différentes tensions.
Lors de la lecture de données en direct, la valeur décimale, binaire ou hexadécimale du signal du capteur peut être affichée.
Un signal de tension <0,5 volts (025d) est considéré comme un court-circuit à la terre ;
Si le signal dépasse 4,5 volts (220d), l'ordinateur traduit cela par un court-circuit avec le positif.
Tension en valeurs décimales, binaires et hexadécimales
Conversion des signaux du générateur d'impulsions en un message numérique : Les signaux des générateurs d'impulsions, y compris le capteur inductif de position du vilebrequin, sont en fait des signaux marche-arrêt qui surviennent après que les dents de la roue d'impulsions ont dépassé le capteur. La tension alternative du capteur doit d'abord être convertie en tension carrée avant que le signal ne soit présenté au processeur.
Sur la figure, nous voyons une tension alternative sinusoïdale sur le côté gauche de l'interface. Dans l'électronique d'interface, cette tension alternative est convertie en une tension carrée. Cette tension de bloc est ensuite lue par le bloc minuterie/compteur : lorsque l'impulsion est haute, le compteur commence à compter, et arrête de compter lorsque l'impulsion redevient haute. Le nombre de comptes est une mesure de la période. fréquence du signal.
Conversion du signal du générateur d'impulsions en signal numérique avec le bloc minuterie/compteur
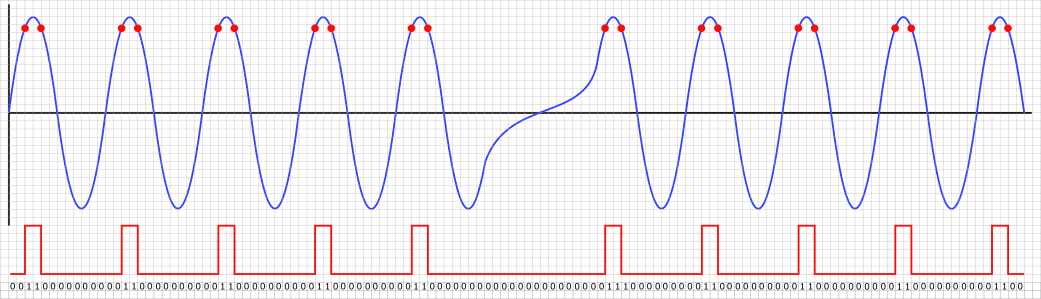
Dans l'image ci-dessous, nous voyons un signal du capteur inductif de vilebrequin avec des points rouges sur les flancs supérieurs. Les points rouges sont réglés sur une tension pour augmenter (logique 1) ou diminuer (logique 0) la tension de bloc. L'explication continue sous cette image.
Tension alternative sinusoïdale et signal numérisé sans hystérésis
Cependant, la tension du capteur n’est jamais complètement pure. Il y aura toujours une petite fluctuation dans le profil de tension. Dans ce cas, l’électronique de l’interface peut indiquer à tort qu’il s’agit d’un 0 logique, alors qu’il devrait en réalité s’agir d’un 1.
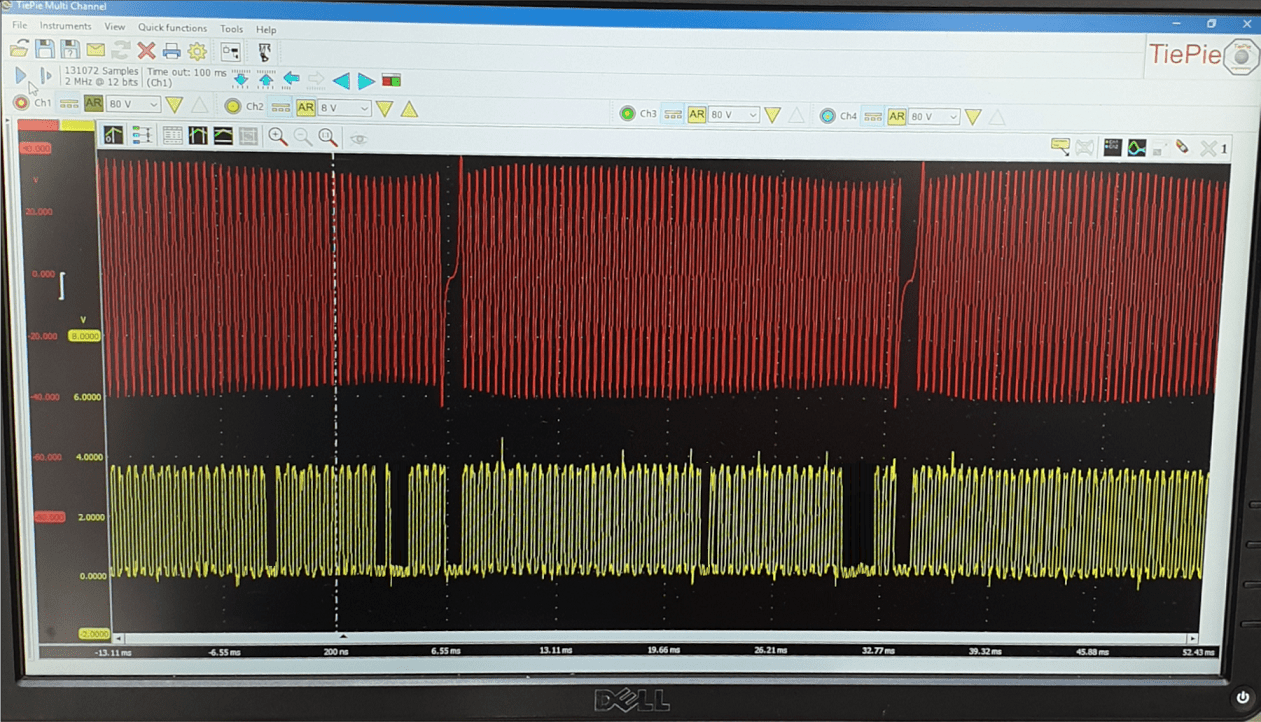
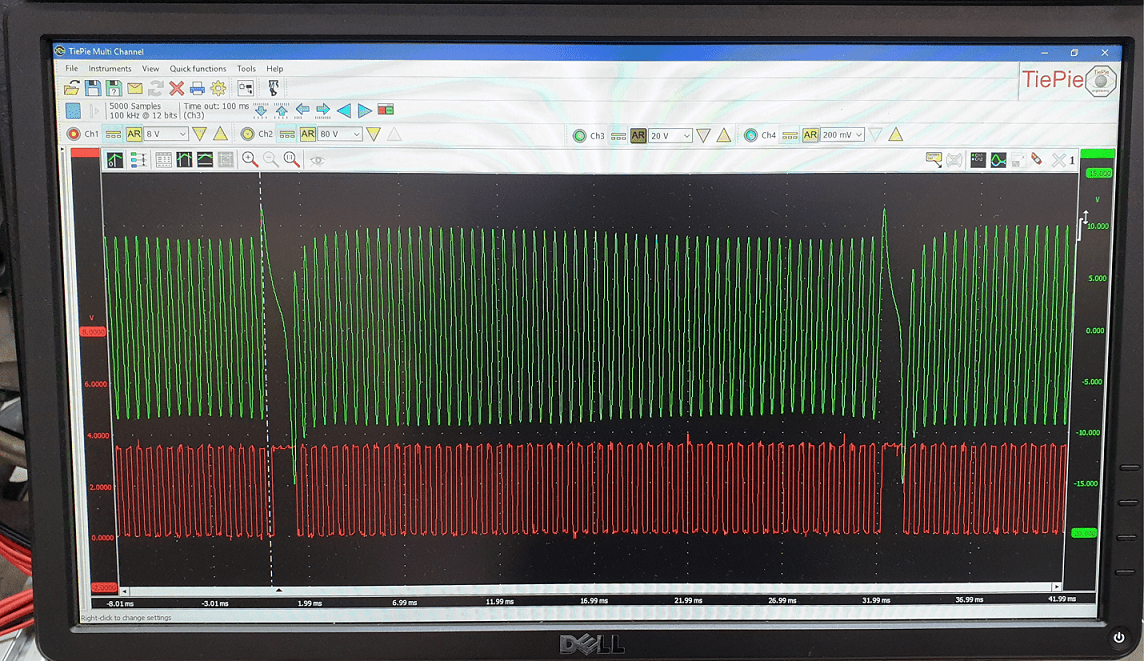
L'image de l'oscilloscope ci-dessous a été enregistrée lors de son exécution Projet BMW Megasquirt. L'image de l'oscilloscope montre la numérisation (jaune) du signal inductif du vilebrequin (rouge). L'image montre clairement qu'il manque des impulsions dans le signal de bloc jaune, alors qu'à ce moment-là, aucune dent manquante ne passe dans le signal du vilebrequin.
Le signal numérique impur contient des erreurs : il manque des informations
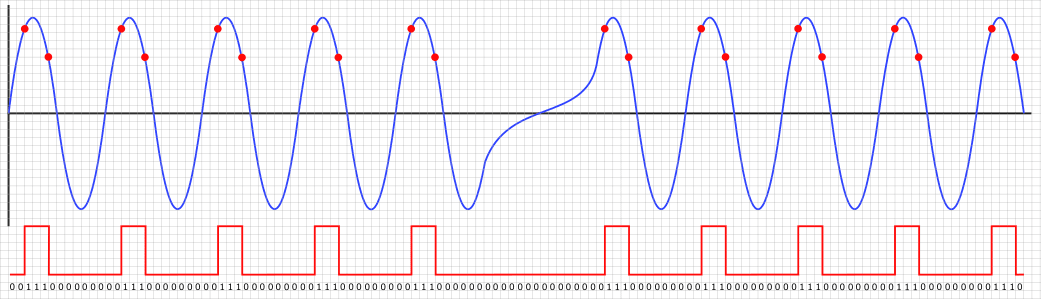
Pour garantir que de petites fluctuations dans le profil de tension ne provoquent pas une interprétation incorrecte par l'ECU, une hystérésis a été intégrée. L'hystérésis est la différence entre les fronts montants et descendants du profil de tension. Dans l'image ci-dessous, nous voyons que les points rouges sur les fronts montants ont une tension plus élevée que les points rouges sur les fronts descendants. De cette façon, nous pouvons être sûrs que de petites fluctuations du signal n'affectent pas la conversion numérique.
Dans le premier paragraphe où nous avons commencé à parler de la conversion du signal impulsionnel en signal numérique, il a déjà été mentionné que la fréquence du signal est déterminée sur la base du temps entre deux fronts montants du signal carré. Dans ces exemples, on peut clairement déduire que l'hystérésis influence bien la largeur du signal carré, mais n'a aucune influence sur le temps entre les fronts montants, et n'a donc aucune influence sur la fréquence du signal.
Signal du générateur d'impulsions numérisé avec hystérésis
Avec une hystérésis correctement réglée, le signal sinusoïdal est correctement converti en une tension d'onde carrée utilisable, avec uniquement les multiples tensions logiques aux endroits où passe la dent manquante.
Attention, lors de la configuration du calculateur MegaSquirt, des paramètres ont été modifiés, notamment le déclenchement sur les lignes montantes et descendantes. En conséquence, lors du passage de la dent manquante dans le premier exemple, la tension est de 0 volt et dans l'image du scope ci-dessous la tension est de 5 volts.
Signal du générateur d'impulsions avec une tension d'onde carrée propre et correcte
Signaux de sortie : Les signaux de sortie sont constitués d'impulsions numériques marche/arrêt avec une plage de tension comprise entre 0 et 5 volts (niveau TTL) avec un courant très faible. Cependant, les actionneurs nécessitent un contrôle avec des niveaux de tension et des courants plus élevés. Les signaux marche/arrêt peuvent être modulés en largeur d'impulsion (PWM), où la largeur d'impulsion peut varier à une fréquence constante.
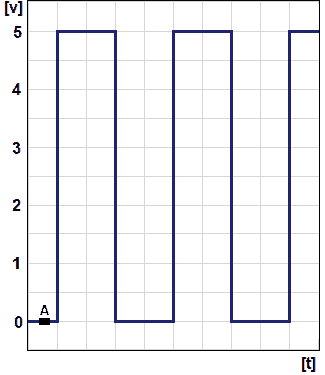
La figure suivante montre une tension carrée au niveau TTL en fonction du temps. Le cycle de service de ce signal PWM est de 50 %.
Des pilotes sont nécessaires pour contrôler les actionneurs. Avec le signal de sortie numérique, le courant requis peut être obtenu avec un pilote. Dans la section suivante, nous discuterons des pilotes.
Exemple : signal PWM
Nous trouvons des pilotes dans chaque calculateur et dans certains actionneurs tels que les bobines d'allumage DIS. Un pilote est également appelé étage de sortie ou transistor de puissance. Le driver permet de convertir les signaux de sortie au niveau TTL : 0 à 5 volts, avec un faible courant de 1 mA provenant du calculateur en des tensions jusqu'à 14 volts et des courants jusqu'à environ 10 A.
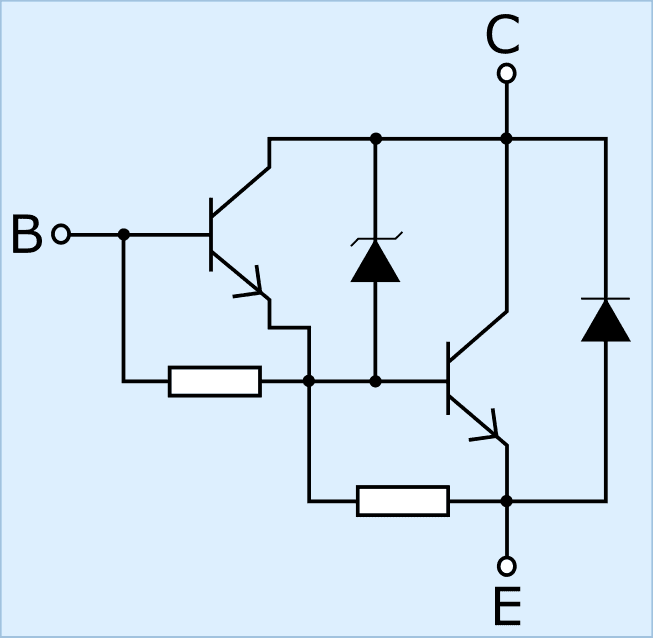
Un conducteur peut en connecter plusieurs transistor contenir. Nous appelons un tel transistor un "Transistor Darlington« . Les images suivantes montrent les circuits suivants :
Schéma d'un circuit Darlington à deux transistors pour la commande de la bobine d'allumage (source : fiche technique BU941ZR).
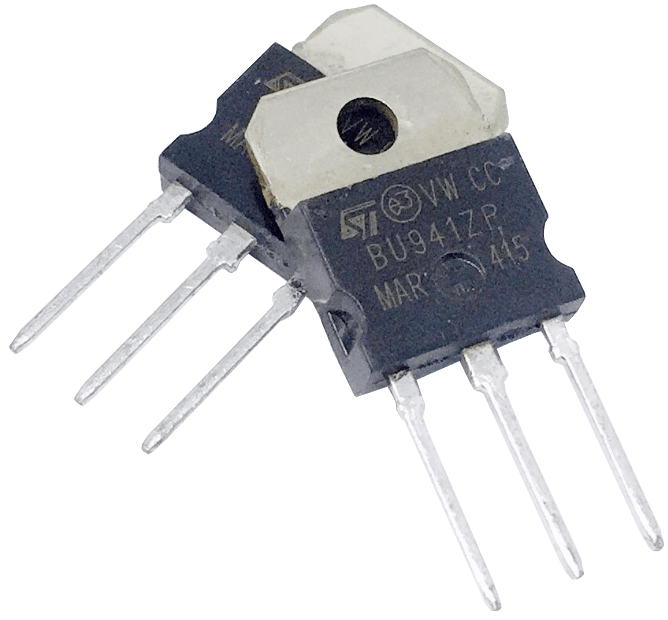
Deux transistors, chacun avec un circuit Darlington (BU941ZR)
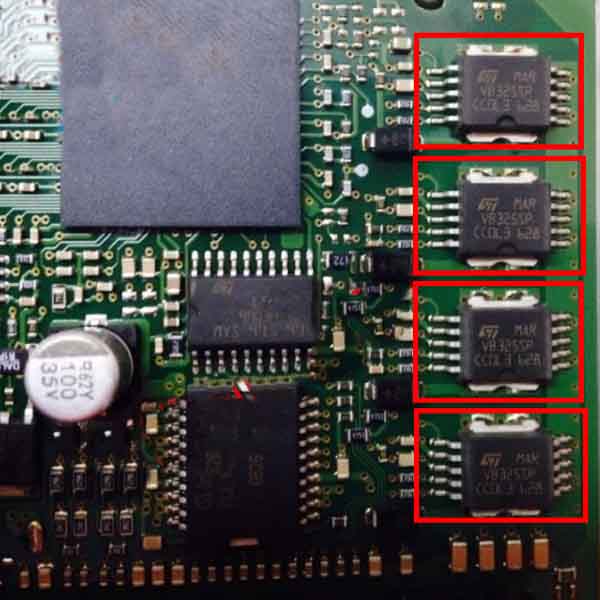
CI de pilotage avec circuits Darlington et électronique supplémentaire pour, entre autres, la protection contre la température et le retour vers le microprocesseur.
1. Circuit de Darlington
2. Transistors Darlington (2x)
3. CI pilotes avec plusieurs circuits Darlington
Sur la page: méthodes de contrôle des actionneurs la commande d'actionneurs passifs, actifs et intelligents au moyen d'un transistor (de puissance) ou FET est discutée plus en détail.