Thèmes:
- Préface
- Principe de fonctionnement des moteurs électriques
- Moteur électrique à courant continu avec balais de charbon
- Moteur électrique à courant continu sans balais de charbon
Préface:
On retrouve les moteurs électriques à de plus en plus d’endroits dans la voiture. Dans un moteur électrique, un courant électrique est converti en mouvement et en chaleur. On retrouve un moteur électrique dans le réglage des rétroviseurs et du siège, mais aussi comme moteur d'essuie-glace sur le mécanisme d'essuie-glace ou comme démarreur. Ces moteurs électriques fonctionnent sous une tension de 12 à 14 volts. Sur cette page, nous nous limitons aux moteurs électriques à l'intérieur et à l'extérieur.
Les moteurs électriques assurent également une propulsion (partiellement) électrique dans les véhicules hybrides et entièrement électriques. Ce type de moteur électrique est abordé sur la page : Moteurs électriques HT.
Nous pouvons diviser les moteurs électriques à courant continu en :
- Moteur électrique avec balais de charbon (champ électromagnétique et induit)
- Moteurs électriques en série ;
- Moteurs électriques parallèles ;
- Moteurs électriques sans balais.
Principe de fonctionnement des moteurs électriques :
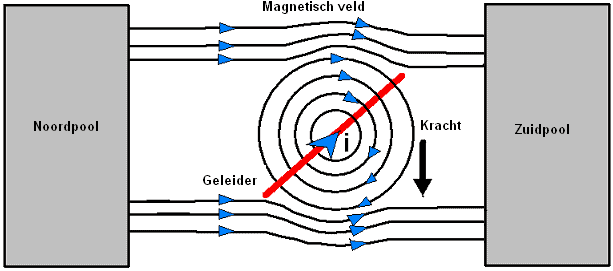
Dans un moteur électrique, un courant électrique est converti en un mouvement de rotation. Le mouvement est provoqué par deux pôles magnétiques qui s’attirent ou se repoussent :
- Un pôle nord et un pôle sud s'attirent ;
- Deux pôles nord se repoussent ;
- Deux pôles sud se repoussent.
Un aimant possède un pôle nord et un pôle sud avec des charges opposées. Lorsque cet aimant est brisé en deux, vous n’avez pas soudainement deux pôles séparés, mais deux nouveaux aimants, tous deux dotés d’un pôle nord et d’un pôle sud.
Plusieurs pôles magnétiques (nord et sud) sont fixés au boîtier. Il existe un champ magnétique entre les pôles nord et sud. L'arbre de sortie (l'induit) tourne en raison des changements dans le champ magnétique.
Dans un moteur électrique, deux pôles du même nom sont constamment placés en face l'un de l'autre à l'aide (généralement) d'aimants permanents, ou bien d'électro-aimants. Parce que les pôles du même nom se repoussent, un mouvement se crée.
Moteur électrique à courant continu avec balais de charbon :
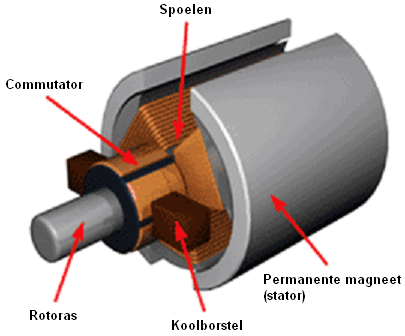
Presque tous les moteurs électriques de la technologie automobile sont conçus comme des moteurs à courant continu avec des aimants permanents et des balais de charbon. Dans ce type de moteurs électriques on retrouve les aimants suivants :
- Aimants permanents (un pôle nord et un pôle sud) : il existe un champ magnétique stationnaire entre eux ;
- Bobines : un champ électromagnétique y est généré. Le champ électromagnétique tournant est généré dans les bobines.
Les aimants permanents sont situés à gauche et à droite du rotor et se composent d'un pôle nord et d'un pôle sud. Entre ces pôles nord et sud se trouve un champ magnétique stationnaire qui ne change pas lorsque le moteur électrique fonctionne ou est à l'arrêt.
Un champ électromagnétique tournant est généré dans les bobines dès que le courant les traverse. Le courant est fourni et évacué par les balais de charbon via le collecteur.
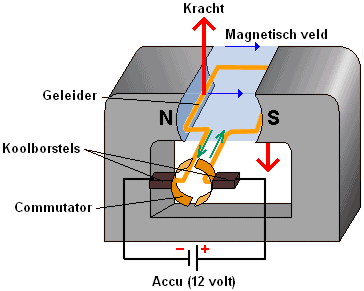
L'inversion du sens du courant se fait par commutation : deux balais de charbon glissent sur le collecteur, qui est constitué d'un côté plus et d'un côté moins. Le balai de charbon du côté positif transporte le courant vers le conducteur (flèches vertes sur la figure). Le courant quitte le conducteur via le balai de charbon du côté négatif. Le courant circulant dans le conducteur crée un champ électromagnétique.
Une force est créée entre le magnétisme résultant dans l'armature (le conducteur) et le champ (les aimants permanents) (flèches rouges dans l'image). Cette force fait tourner l’induit et le collecteur sur leur axe. Les balais de charbon frappent ensuite l'autre partie du collecteur, inversant le sens du courant dans l'induit. Le champ magnétique et la force s'accumulent dans le même sens, de sorte que l'armature tourne à nouveau autour de son axe.
On peut changer le sens de rotation du moteur électrique (lire : l'induit) en inversant le plus et le moins des balais de charbon.
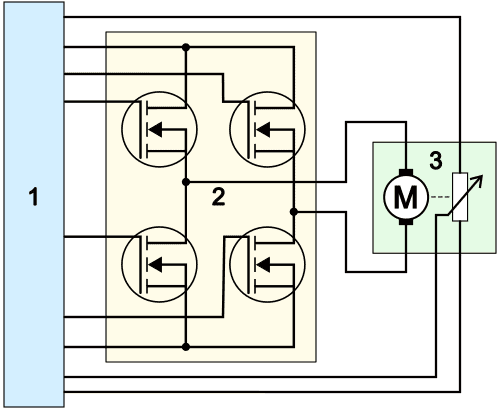
L'échange du plus et du moins peut être réalisé au moyen d'un pont en H.
- L'ECU (1) contrôle simultanément deux des quatre transistors ou FET (4) ;
- Les FET (2) donnent au moteur électrique (3) un plus et une masse. Selon les deux FET activés, le balai de charbon supérieur est positif et le balai inférieur est meulé, ou vice versa ;
- Le potentiomètre à côté du moteur électrique enregistre la position et le sens de rotation. Tous les moteurs électriques ne sont pas équipés d'un potentiomètre.
Voir la page Pont en H pour les conceptions possibles et les méthodes de commutation du pont en H.
Moteur électrique à courant continu sans balais de charbon :
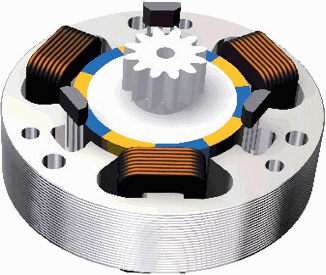
Le moteur à courant continu (CC) sans balais est un moteur synchrone. La commande électrique a remplacé les balais de charbon. Ce type de moteur électrique est très similaire au moteur synchrone à courant alternatif à aimants permanents, tel qu'utilisé dans le groupe motopropulseur de véhicules électriques. La principale différence entre les deux moteurs réside dans le contrôle : le moteur AC est contrôlé avec une tension alternative sinusoïdale modulée et le moteur DC avec une tension carrée.
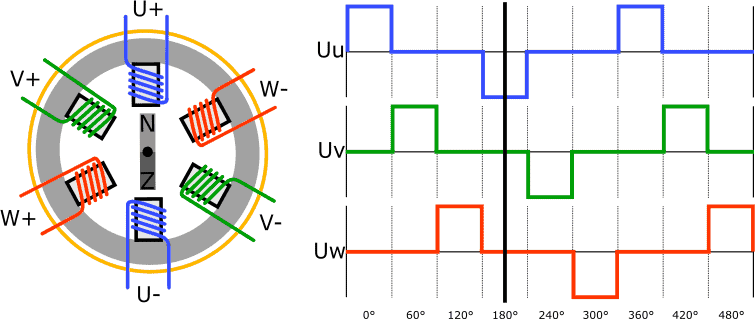
Le stator contient souvent trois ou six bobines (U, V et W) et le rotor est un aimant permanent. L'image ci-dessous montre la structure schématique du moteur à courant continu avec la progression de la tension dans les trois bobines. En réalité, plusieurs capteurs Hall sont installés entre les pôles pour déterminer la position du rotor.
L'unité de commande détermine quelles bobines elle doit contrôler en fonction de la position du rotor.
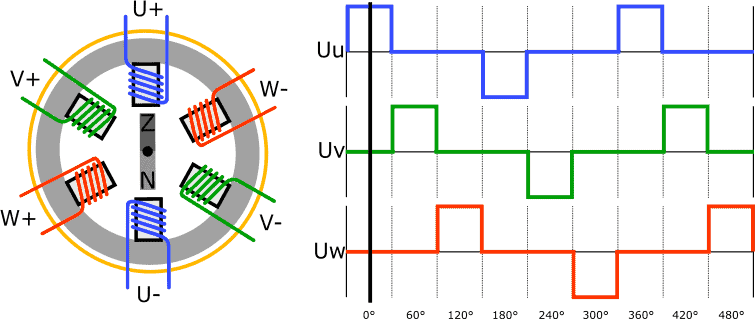
Dans l'image suivante, la bobine U+ est alimentée. La façon dont la bobine est enroulée autour du pôle détermine s'il s'agira d'un pôle nord ou sud. Dans cet exemple, le U+ est le pôle nord et le U- est le pôle sud.
Le rotor est conçu comme un aimant permanent. Comme décrit dans les paragraphes précédents, le rotor se positionne ou tourne en raison d'un champ magnétique changeant à travers les bobines.
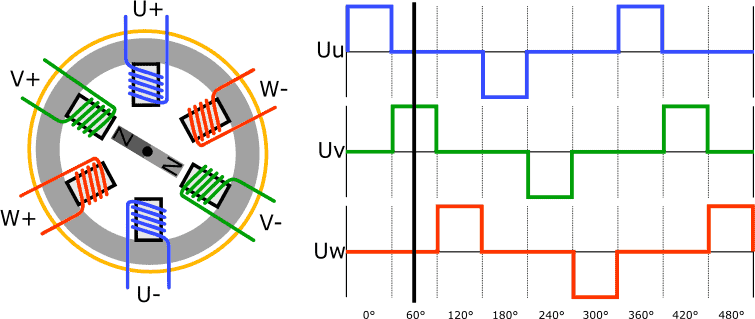
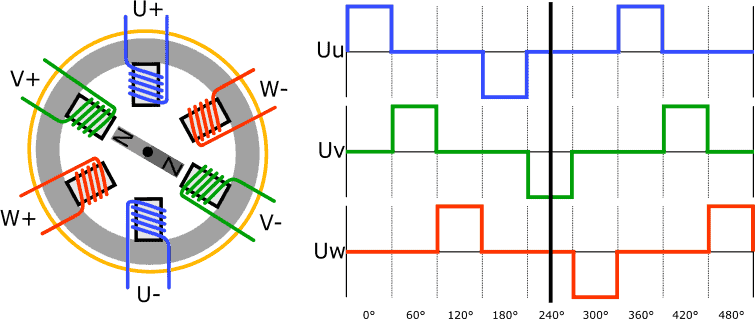
Pour faire tourner le rotor dans le sens antihoraire à partir de la position indiquée dans la figure précédente, les bobines en V sont alimentées.
Le V+ devient le pôle nord, le V- le pôle sud. Le rotor à aimant permanent tourne ;
les pôles nord et sud s’attirent, tout comme les pôles sud et nord de l’autre côté de l’aimant.
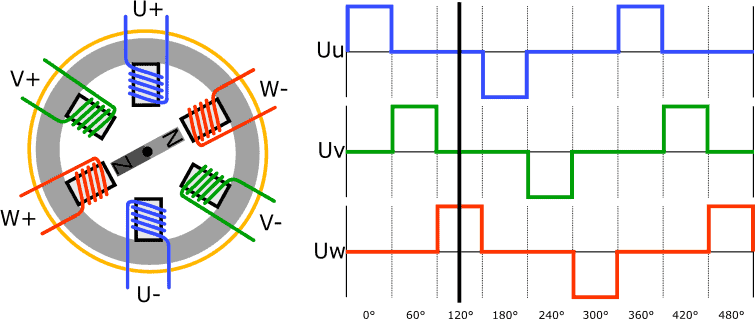
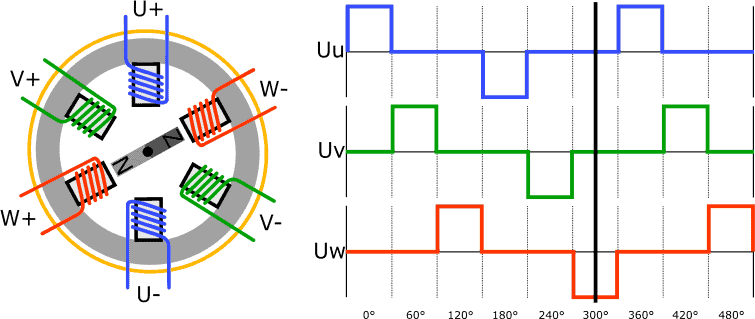
Maintenant, les bobines W sont alimentées pour faire tourner le rotor de 60 degrés supplémentaires.
La bobine W+ devient le pôle nord et W- le pôle sud. Le rotor tourne et prend sa nouvelle position.
Le rotor de l'image suivante a tourné de 180 degrés depuis la première situation ; dans la première image, le pôle sud pointait vers le haut ; maintenant c'est le pôle Nord.
La polarité de la bobine U+ et de la bobine U- est inversée, ce qui fait circuler le courant à travers les bobines en sens inverse. Cela fait du U+ un pôle sud et du U- un pôle nord.
Le rotor à aimant permanent tourne davantage en raison de la modification du champ magnétique.
Pour faire tourner à nouveau le rotor de 60 degrés, le V- devient un pôle nord et le V+ un pôle sud. Le rotor prend la nouvelle position.
Une fois de plus, le rotor tourne de 60 degrés en raison d'un changement du champ magnétique dans les bobines :
La bobine W- est le pôle nord et la bobine W+ est le pôle sud.
Dans les six situations décrites ci-dessus, deux bobines sont constamment alimentées en même temps. On trouve aussi souvent des moteurs DC brushless à trois bobines au lieu de six. Avec trois bobines, les bobines U, V et W sont également alimentées les unes après les autres, mais il n'y a pas de changement de polarité.
Le moteur CC sans balais est un moteur puissant adapté aux applications où un couple élevé est requis au démarrage, à vitesse moyenne et à vitesse élevée. Le moteur DC sans balais et le moteur pas à pas sont souvent confondus. Cela n'est pas surprenant, car le fonctionnement et le contrôle des moteurs présentent de nombreuses similitudes : les deux moteurs sont entraînés en créant un champ magnétique entre les bobines et le rotor avec des aimants permanents. Cependant, outre la terminologie, les deux moteurs présentent des différences significatives, principalement dans l'application et donc dans le choix des matériaux.
Le moteur pas à pas est essentiellement un moteur à courant continu sans balais, mais il est appliqué dans un domaine différent. Alors que le moteur à courant continu est principalement utilisé pour un fonctionnement à long terme à des vitesses élevées, nous voyons le moteur pas à pas dans des applications où un réglage dans une position exacte est le plus important.
Le moteur à courant continu illustré est contrôlé toutes les rotations de 60° du rotor. Celle-ci pourrait éventuellement être réduite à 30° si l'on excitait quatre bobines simultanément entre chaque commande, obtenant ainsi une position intermédiaire. Cependant, un moteur pas à pas est capable d'ajuster des incréments de 1,8° à 0,9°. Cela montre en outre que le moteur pas à pas est adapté à des positions très précises.
Les différentes versions, les méthodes de contrôle par le calculateur et les applications se trouvent sur la page moteur pas à pas.
