فاعل، موضوع:
- مقدمه
- اصل کار موتورهای الکتریکی
- موتور الکتریکی DC با برس های کربنی
- موتور الکتریکی DC بدون برس کربن
معرفی:
ما موتورهای الکتریکی را در مکان های بیشتری در خودرو پیدا می کنیم. در موتور الکتریکی، جریان الکتریکی به حرکت و گرما تبدیل می شود. ما یک موتور الکتریکی را در تنظیم آینه و صندلی و همچنین به عنوان موتور برف پاک کن روی مکانیسم برف پاک کن شیشه جلو یا به عنوان موتور استارت پیدا می کنیم. این موتورهای الکتریکی با ولتاژ 12 تا 14 ولت کار می کنند. در این صفحه ما خود را به موتورهای الکتریکی در داخل و خارج محدود می کنیم.
موتورهای الکتریکی همچنین نیروی محرکه الکتریکی (تا حدی) را در خودروهای هیبریدی و تمام الکتریکی ارائه می دهند. این نوع موتور الکتریکی در صفحه مورد بحث قرار گرفته است: موتورهای الکتریکی HV.
می توانیم موتورهای الکتریکی DC را به دو دسته تقسیم کنیم:
- موتور الکتریکی با برس های کربن (میدان الکترومغناطیسی و آرمیچر)
- موتورهای الکتریکی سری؛
- موتورهای الکتریکی موازی؛
- موتورهای الکتریکی براشلس.
اصول عملکرد موتورهای الکتریکی:
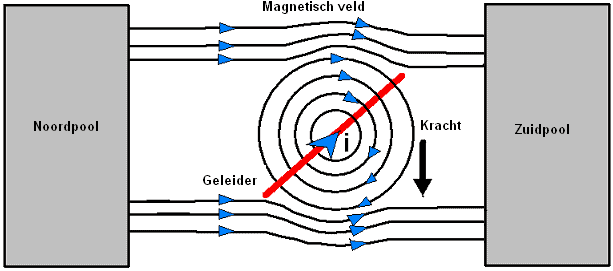
در موتور الکتریکی، جریان الکتریکی به یک حرکت چرخشی تبدیل می شود. این حرکت توسط دو قطب مغناطیسی ایجاد می شود که یکدیگر را جذب یا دفع می کنند:
- یک قطب شمال و قطب جنوب یکدیگر را جذب می کنند.
- دو قطب شمال یکدیگر را دفع می کنند.
- دو قطب جنوب یکدیگر را دفع می کنند.
آهنربا دارای یک قطب شمال و جنوب با بارهای مخالف است. وقتی آن آهنربا از وسط شکسته شد، شما ناگهان دو قطب مجزا ندارید، بلکه دو آهنربای جدید خواهید داشت که هر دو دارای قطب شمال و جنوب هستند.
چندین قطب مغناطیسی (شمال و جنوب) به محفظه ثابت شده است. یک میدان مغناطیسی بین قطب شمال و جنوب وجود دارد. شفت خروجی (آرمیچر) به دلیل تغییرات میدان مغناطیسی می چرخد.
در یک موتور الکتریکی، دو قطب به همین نام با استفاده از آهنرباهای دائمی (معمولاً) یا آهنرباهای الکتریکی به طور مداوم در مقابل یکدیگر قرار می گیرند. چون قطب های همنام یکدیگر را دفع می کنند، حرکتی ایجاد می شود.
موتور الکتریکی DC با برس های کربنی:
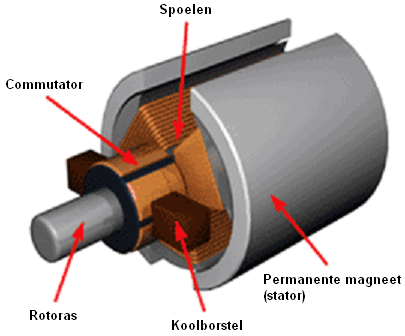
تقریباً تمام موتورهای الکتریکی در فناوری خودرو به عنوان موتورهای DC با آهنرباهای دائمی و برس های کربنی طراحی شده اند. در این نوع موتورهای الکتریکی، آهنرباهای زیر را پیدا می کنیم:
- آهنرباهای دائمی (یک قطب شمال و یک قطب جنوب): یک میدان مغناطیسی ثابت بین آنها وجود دارد.
- سیم پیچ: میدان الکترومغناطیسی در آن ایجاد می شود. میدان الکترومغناطیسی دوار در سیم پیچ ها ایجاد می شود.
آهنرباهای دائمی در سمت چپ و راست روتور قرار دارند و از یک قطب شمال و یک قطب جنوب تشکیل شده اند. بین این قطب شمال و جنوب یک میدان مغناطیسی ثابت وجود دارد که وقتی موتور الکتریکی کار می کند یا ثابت می ایستد تغییر نمی کند.
به محض عبور جریان از سیم پیچ ها، یک میدان الکترومغناطیسی دوار در سیم پیچ ها ایجاد می شود. جریان توسط برس های کربنی از طریق کموتاتور تامین و حذف می شود.
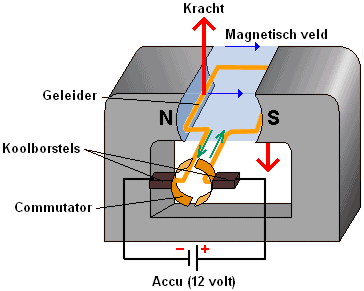
معکوس کردن جهت جریان با استفاده از کموتاسیون انجام می شود: دو برس کربن روی کموتاتور کشیده می شوند که از یک طرف مثبت و منفی تشکیل شده است. برس کربن در سمت مثبت جریان را به هادی می رساند (فلش های سبز رنگ در شکل). جریان از طریق برس کربن در سمت منفی هادی را ترک می کند. جریانی که از هادی عبور می کند، میدان الکترومغناطیسی ایجاد می کند.
نیرویی بین مغناطیس حاصل در آرمیچر (رسانا) و میدان (آهنربای دائمی) (فلش های قرمز رنگ در تصویر) ایجاد می شود. این نیرو باعث می شود که آرمیچر و کموتاتور بر روی محور خود بچرخند. سپس برس های کربنی به قسمت دیگر کموتاتور برخورد می کنند و جهت جریان در آرمیچر را معکوس می کنند. میدان مغناطیسی و نیرو در یک جهت ایجاد می شوند، به طوری که آرمیچر دوباره حول محور خود می چرخد.
ما می توانیم جهت چرخش موتور الکتریکی (بخوانید آرمیچر) را با معکوس کردن مثبت و منفی برس های کربنی تغییر دهیم.
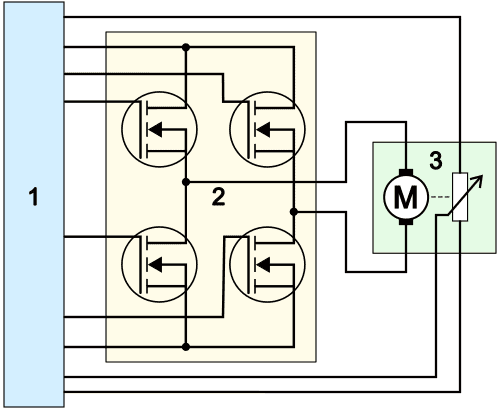
تبادل مثبت و منفی را می توان با استفاده از یک پل H به دست آورد.
- ECU (1) به طور همزمان دو تا از چهار ترانزیستور یا FET (4) را کنترل می کند.
- FET ها (2) به موتور الکتریکی (3) امتیاز مثبت و زمین می دهند. بسته به اینکه کدام دو FET روشن باشد، برس کربن بالا مثبت و پایین زمین است، یا برعکس.
- پتانسیومتر کنار موتور الکتریکی موقعیت و جهت چرخش را ثبت می کند. همه موتورهای الکتریکی مجهز به پتانسیومتر نیستند.
صفحه را ببینید پل H برای طراحی های ممکن و روش های سوئیچینگ پل H.
موتور الکتریکی DC بدون برس کربن:
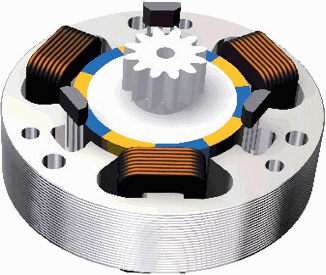
موتور جریان مستقیم بدون جاروبک (DC) یک موتور سنکرون است. کنترل الکتریکی جایگزین برس های کربنی شده است. این نوع موتور الکتریکی بسیار شبیه به موتور AC سنکرون با آهنرباهای دائمی است که در آن استفاده می شود پیشرانه خودروهای الکتریکی. تفاوت اصلی این دو موتور در کنترل است: موتور AC با یک ولتاژ متناوب سینوسی مدوله شده و موتور DC با ولتاژ موج مربعی کنترل می شود.
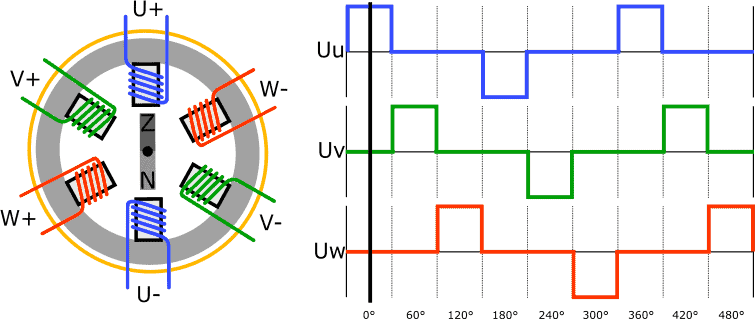
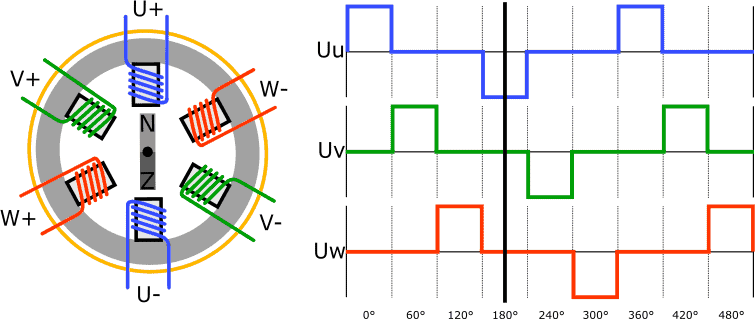
استاتور اغلب شامل سه یا شش سیم پیچ (U، V و W) است و روتور یک آهنربای دائمی است. تصویر زیر ساختار شماتیک موتور DC را با پیشرفت ولتاژ از طریق سه سیم پیچ نشان می دهد. در واقع، چندین سنسور هال بین قطب ها برای تعیین موقعیت روتور نصب می شود.
واحد کنترل بر اساس موقعیت روتور تعیین می کند که کدام سیم پیچ ها را باید کنترل کند.
در تصویر زیر سیم پیچ U+ روشن شده است. نحوه پیچیدن سیم پیچ به دور قطب تعیین می کند که قطب شمال یا جنوب باشد. در این مثال، U+ قطب شمال و U- قطب جنوب است.
روتور به عنوان یک آهنربای دائمی طراحی شده است. همانطور که در پاراگراف های قبلی توضیح داده شد، روتور در نتیجه تغییر میدان مغناطیسی از طریق سیم پیچ ها قرار می گیرد یا می چرخد.
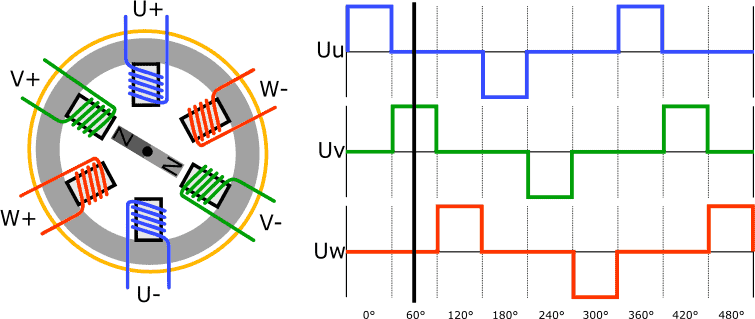
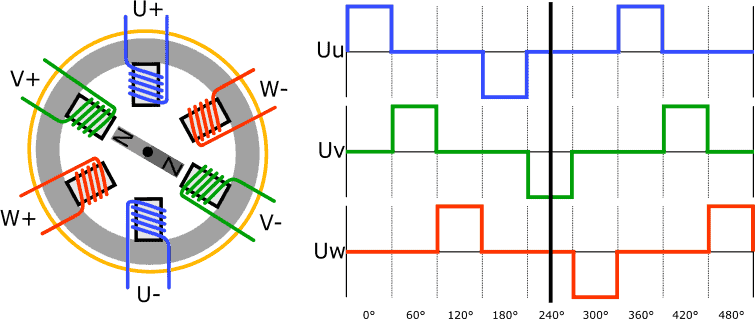
برای چرخاندن روتور در خلاف جهت عقربه های ساعت از موقعیت نشان داده شده در شکل قبل، سیم پیچ های V روشن می شوند.
V+ تبدیل به قطب شمال و V- قطب جنوب می شود. روتور آهنربای دائمی می چرخد.
قطب شمال و جنوب همدیگر را جذب می کنند، همانطور که قطب جنوب و شمال در طرف دیگر آهنربا همدیگر را جذب می کنند.
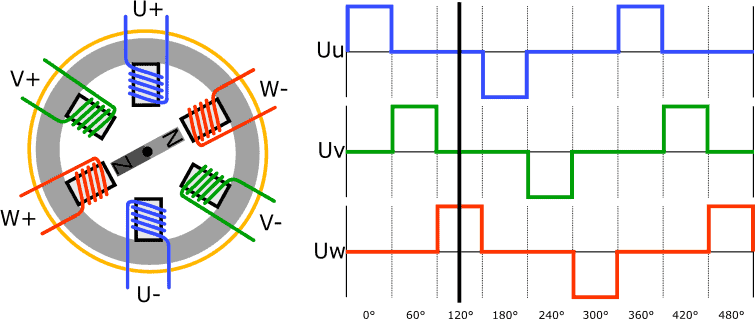
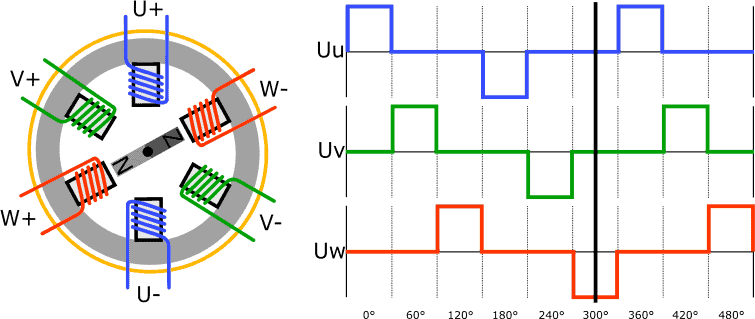
اکنون سیم پیچ های W برای چرخش روتور 60 درجه دیگر انرژی می گیرند.
سیم پیچ W+ تبدیل به قطب شمال و W- قطب جنوب می شود. روتور می چرخد و موقعیت جدید خود را می گیرد.
روتور در تصویر بعدی از موقعیت اول 180 درجه چرخیده است. در تصویر اول، قطب جنوب رو به بالا بود. اکنون آن قطب شمال است.
قطبیت سیم پیچ U+ و سیم پیچ U- معکوس شده و باعث می شود جریان به صورت معکوس از سیم پیچ ها عبور کند. این باعث می شود U+ قطب جنوب و U- قطب شمال باشد.
روتور با آهنربای دائمی با تغییر میدان مغناطیسی بیشتر می چرخد.
برای چرخاندن مجدد روتور 60 درجه، V- قطب شمال و V+ قطب جنوب می شود. روتور موقعیت جدید را می گیرد.
یک بار دیگر روتور در نتیجه تغییر میدان مغناطیسی در سیم پیچ ها 60 درجه می چرخد:
سیم پیچ W قطب شمال و W+ قطب جنوب است.
در شش موقعیتی که در بالا توضیح داده شد، دو سیم پیچ دائماً به طور همزمان انرژی می گیرند. ما همچنین اغلب موتورهای DC بدون جاروبک را با سه سیم پیچ به جای شش سیم پیدا می کنیم. با سه سیم پیچ، سیم پیچ های U، V و W نیز یکی پس از دیگری انرژی می گیرند، اما هیچ تغییری در قطبیت وجود ندارد.
موتور DC بدون جاروبک یک موتور قدرتمند مناسب برای کاربردهایی است که گشتاور بالا برای راه اندازی، سرعت متوسط و سرعت بالا مورد نیاز است. موتور DC بدون جاروبک و موتور پله ای اغلب با هم اشتباه گرفته می شوند. این تعجب آور نیست، زیرا عملکرد و کنترل موتورها شباهت های زیادی دارند: هر دو موتور با ایجاد یک میدان مغناطیسی بین سیم پیچ ها و روتور با آهنرباهای دائمی هدایت می شوند. با این حال، علاوه بر اصطلاحات، هر دو موتور تفاوت های قابل توجهی دارند، عمدتاً در کاربرد و در نتیجه انتخاب مواد.
موتور پله ای اساساً یک موتور DC بدون جاروبک است، اما در زمینه متفاوتی کاربرد دارد. در حالی که موتور DC عمدتا برای کار طولانی مدت در سرعت های بالا استفاده می شود، ما شاهد موتور پله ای در برنامه هایی هستیم که تنظیم در یک موقعیت دقیق مهم ترین است.
موتور DC نشان داده شده با هر چرخش 60 درجه روتور کنترل می شود. اگر چهار سیم پیچ را به طور همزمان بین هر کنترل برق دهیم، این ممکن است تا 30 درجه کاهش یابد، بنابراین یک موقعیت میانی به دست می آید. با این حال، یک موتور پله ای قادر به تنظیم افزایش 1,8 درجه تا 0,9 درجه است. این بیشتر نشان می دهد که استپر موتور برای موقعیت های بسیار دقیق مناسب است.
نسخه های مختلف، روش های کنترل توسط ECU و برنامه های کاربردی را می توان در صفحه یافت موتور پله ای.
