فاعل، موضوع:
- پل H
- سنسور موقعیت
- موتور موقعیت یابی دریچه گاز
پل H:
یک موتور الکتریکی با برس های کربنی را می توان به قطعاتی متصل کرد که باید به جلو و عقب حرکت کنند. موتور الکتریکی باید بتواند در دو جهت بچرخد تا بتواند مثلاً یک شیر را باز و بسته کند.
- برای راه اندازی یک موتور الکتریکی، یکی از برس های کربن به یک پلاس و دیگری به زمین متصل می شود.
- برای چرخاندن موتور الکتریکی در جهت دیگر، قطبیت را می توان معکوس کرد. با معکوس کردن مثبت و منفی، جهت چرخش نیز تغییر می کند.
برای فعال کردن تغییر جهت چرخش، از پل H استفاده می شود. ECU دو ترانزیستور یا FET را در یک پل H کنترل می کند تا موتور الکتریکی را با منبع تغذیه و زمین تامین کند. تقریباً هر نوع موتور الکتریکی که توسط ECU کنترل می شود، با ولتاژ و جریان توسط یک پل H تامین می شود. این شامل موتور الکتریکی یک دریچه EGR، دریچه گاز الکتریکی برای موتور بنزینی، تنظیم شیشه آینه، موتور پنجره، تنظیم صندلی، تنظیم فرمان، دریچه های بخاری (شیر مخلوط و دریچه جریان هوای تازه) است. تصویر زیر IC DIL پل H هشت پین (Dual In Line) را با نوع: L9110H نشان می دهد.
شکل زیر شماتیک های یک ECU (1) H-bridge (2) را نشان می دهد ترانزیستورها (سمت چپ) یا FET ها (راست) و الف فعال کننده با مقسم ولتاژ (3).

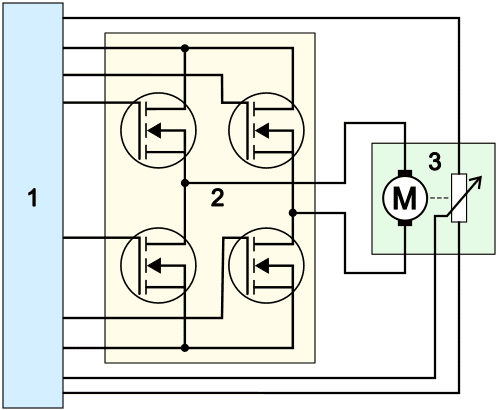
ECU ترانزیستورها یا FET های مناسب را برای رسانایی آن کنترل می کند. دو وضعیت حرکت موتور الکتریکی به چپ یا راست در زیر برای هر نوع پل H بیان شده است. دو ترانزیستور بالا یا FET مثبت و دو ترانزیستور پایین به زمین متصل می شوند. سیم های سبز سیم های کنترلی از ECU (1) برای هدایت ترانزیستورها یا FET ها در پل H هستند. بنابراین کنترل هر دو نوع پل H شباهت های زیادی را نشان می دهد.
پل H با ترانزیستور:
- موتور الکتریکی را در جهت عقربه های ساعت بچرخانید: ترانزیستورهای بالا سمت چپ و پایین سمت راست روشن هستند.
- موتور الکتریکی را در خلاف جهت عقربه های ساعت بچرخانید: ترانزیستورهای بالا سمت راست و پایین سمت چپ روشن هستند.
پل H با FET:
- موتور الکتریکی را در جهت عقربه های ساعت بچرخانید: FET ها در بالا سمت چپ و پایین سمت راست رسانا هستند.
- موتور الکتریکی را در خلاف جهت عقربه های ساعت بچرخانید: FET ها در بالا سمت راست و پایین سمت چپ رسانا هستند.
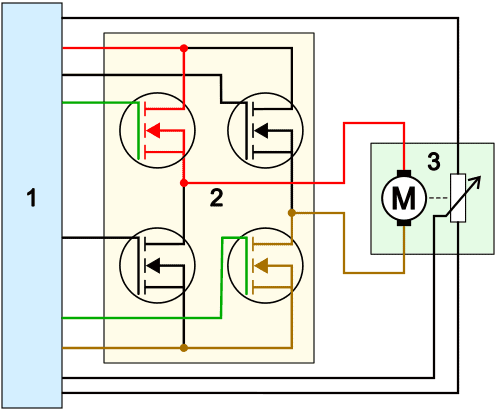
سنسور موقعیت:
ECU ترانسفورها یا FET های مناسب را برای چرخاندن موتور الکتریکی در جهت صحیح کنترل می کند. در مثال های بالا، یک سنسور موقعیت نیز در کنار موتور الکتریکی قابل مشاهده است. این سنسور موقعیت (پتانسیومتر) موقعیت و جهت چرخش موتور الکتریکی را به ECU برمی گرداند. از آنجایی که ECU می داند موتور الکتریکی در چه موقعیتی قرار دارد، ECU می تواند موتور الکتریکی را دقیقاً در موقعیتی که در آن آموزش داده شده است حرکت دهد. نمونه ای از این یک شیر بخاری در محفظه بخاری کنترل آب و هوای تمام اتوماتیک است. شیر بخاری را می توان به طور کامل (100٪) یا کاملاً (0٪) باز کرد، اما همچنین می تواند دو سوم (66٪) باز شود. از آنجایی که موقعیت ها در ECU با آموزش توقف سوپاپ ها مشخص می شود، ECU می تواند موتور الکتریکی را کنترل کند تا زمانی که سیگنال پتانسیومتر موقعیت مورد نظر را ارسال کند. سپس ECU کنترل را متوقف می کند.
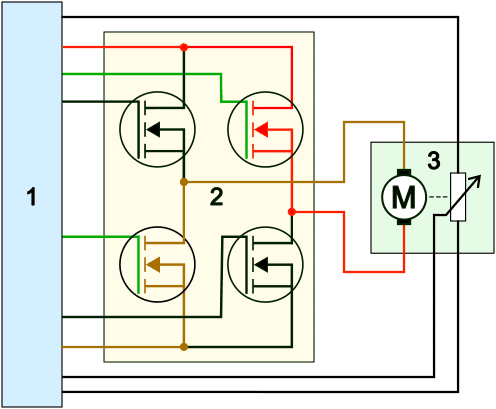
موتور تنظیم دریچه گاز:
پاراگراف اول به کنترل دریچه گاز اشاره کرد که در آن پل H موتور الکتریکی را کنترل می کند. تفاوت با تصاویر نشان داده شده قبلی، پتانسیومتر دوگانه است. در دو تصویر زیر پتانسیومترهای دوگانه را مشاهده می کنیم موتور موقعیت یابی دریچه گاز.
- پتانسیومتر با برف پاک کن ها به سمت بالا: هر دو سیگنال یکسان هستند، اما در یک سطح ولتاژ متفاوت.
- پتانسیومترها با دونده های مقابل یکدیگر: سیگنال ها تصاویر آینه ای هستند. اگر هنگام باز شدن دریچه گاز، یک سیگنال زیاد شود، سیگنال دیگر کاهش می یابد.

