Teemad:
- Sissejuhatus
- Vahelduvvoolu elektrimootor (sünkroonne, püsimagnetitega)
- Sünkroonmootori vahelduvvoolu juhtimine
- Vahelduvvoolu elektrimootor (asünkroonne, oravapuurmootor)
- Sünkroonse ja asünkroonse elektrimootori efektiivsuskaart
Eessõna:
Elektrimootorit kasutatakse hübriid- või täiselektrilise sõiduki juhtimiseks. Elektrimootor muudab elektrienergia (akust või vahemiku pikendajast) rataste käitamiseks liikumiseks. Lisaks suudab elektrimootor mootori pidurdamisel muundada ka kineetilise energia elektrienergiaks: regeneratiivpidurdus. Sel juhul töötab elektrimootor dünamona. Nende kahe funktsiooni tõttu nimetame elektrimootorit ka "elektri masinaks".
Elektrimootori paigutamise võimalused hübriidsõidukisse on järgmised:
- Sisepõlemismootoril, kus jõuülekanne saavutatakse mitme rihma või otse väntvõlli kaudu;
- Mootori ja käigukasti vahel: käigukasti sisendvõlli käitab elektrimootor;
- Integreeritud käigukasti;
- Diferentsiaalil;
- Ratta rummude juures (rummu mootor).
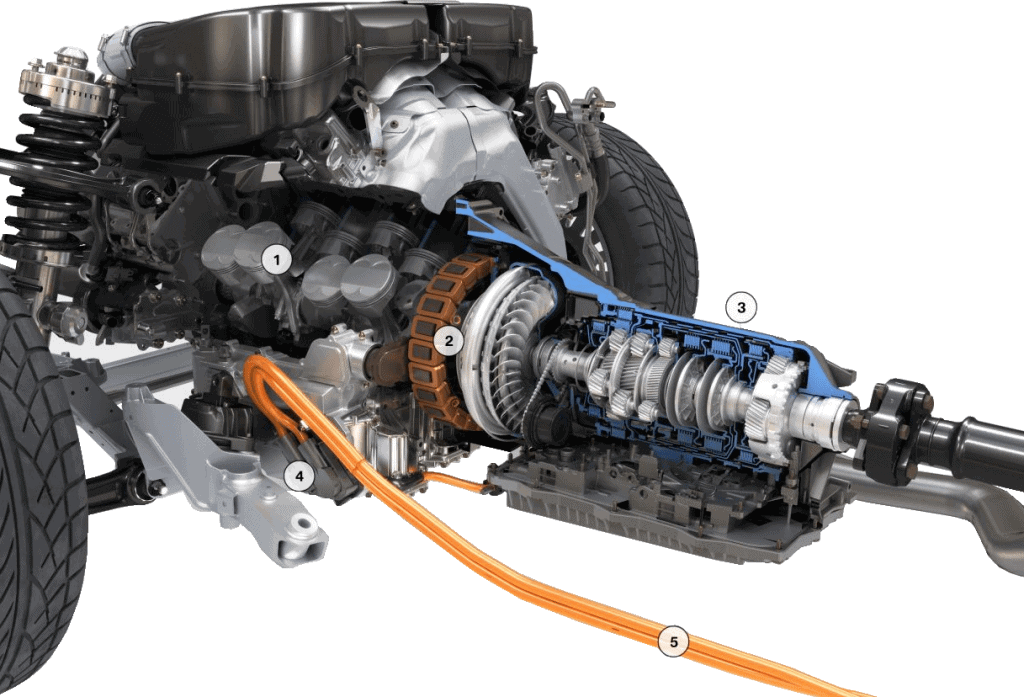
Täiselektriauto elektrimootor on sageli paigaldatud tagasillale. Alloleval pildil on kujutatud elektrimootor koos inverteriga silindrilises korpuses ja Tesla lõppajam.

Vahelduvvoolu elektrimootor (sünkroonne, püsimagnetitega):
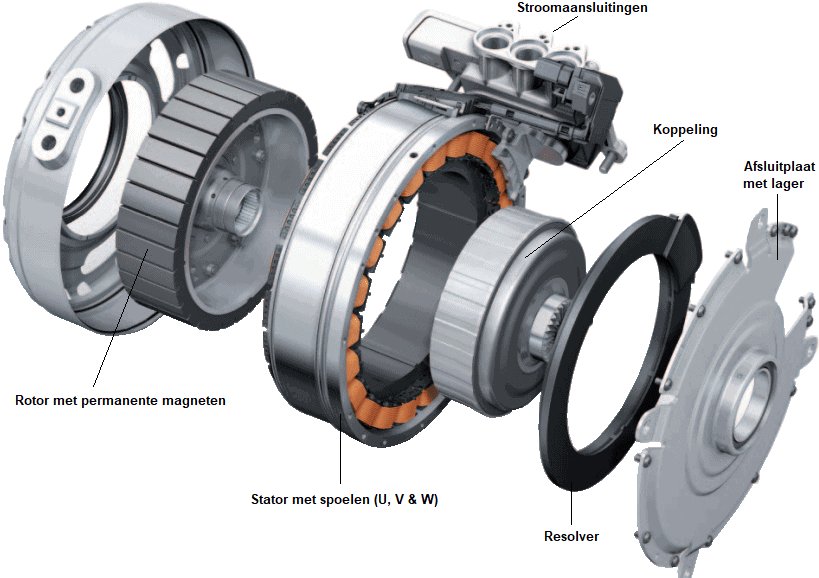
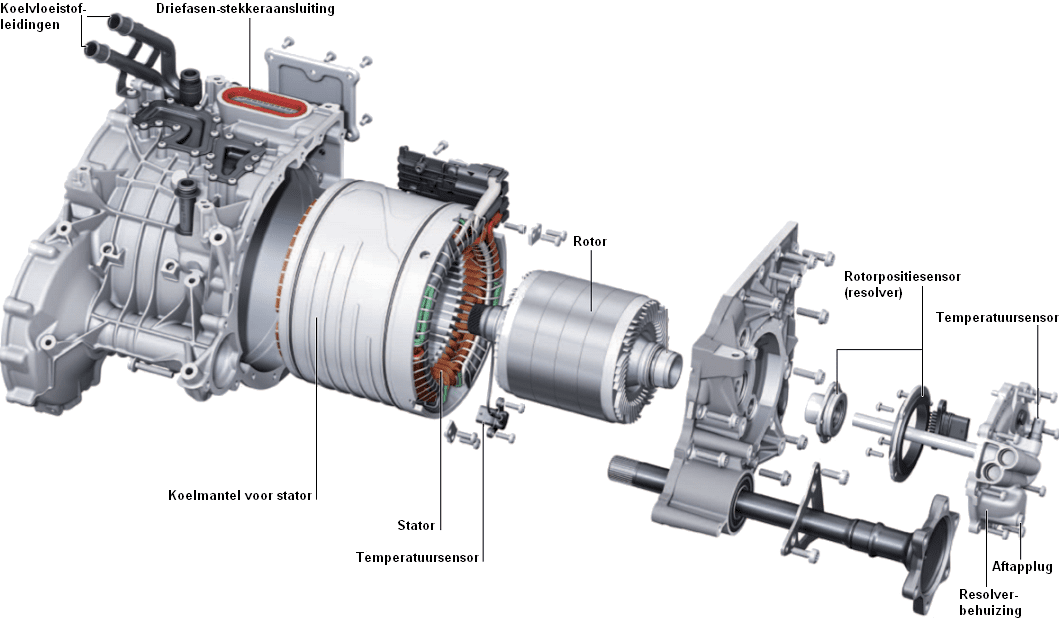
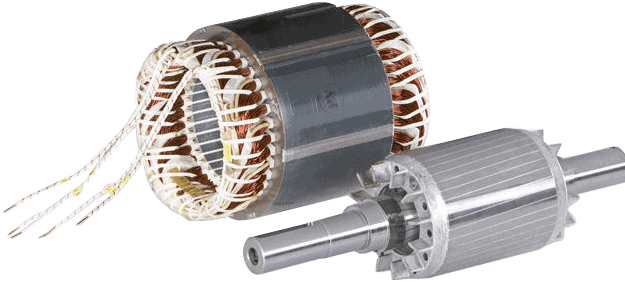
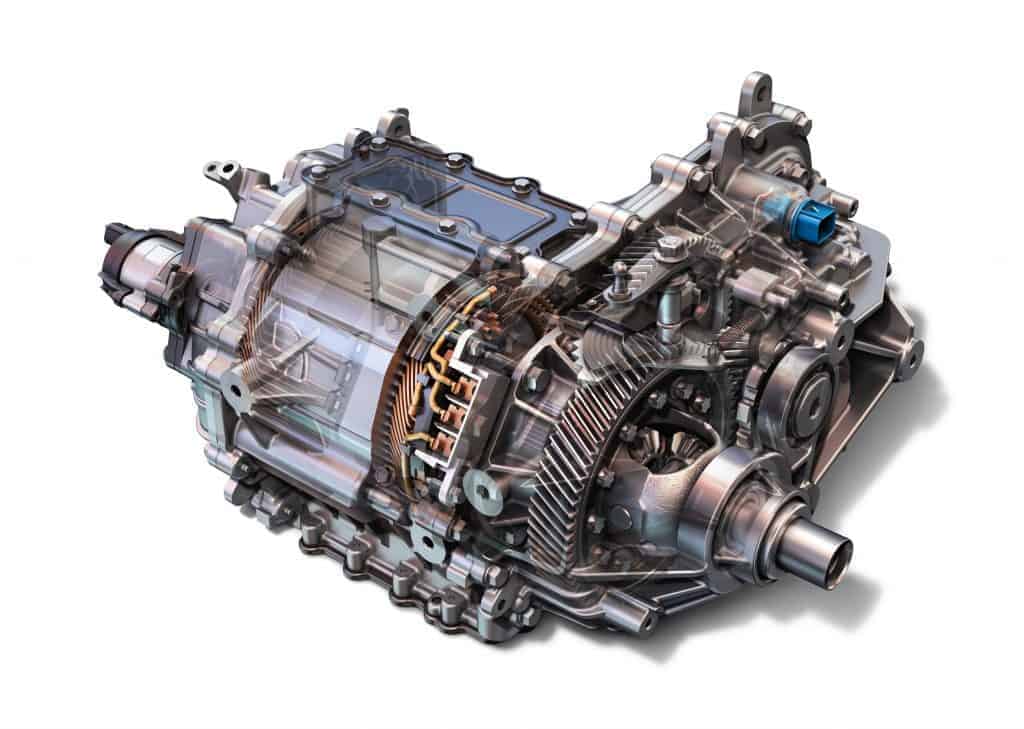
Järgmisel pildil on näha Audi (sünkroonse) elektrimootori osad. Seda tüüpi kasutatakse A6 ja A8 hübriidvariantides. Loetleme lühidalt komponendid. Neid komponente kirjeldatakse üksikasjalikult järgmistes lõikudes.
Püsimagnetitega rootor hakkab pöörlema staatori magnetvälja muutumise tagajärjel. Rootor on ühendatud siduriga, millega saab ühendada või lahti ühendada sisepõlemismootorit ja elektrimootorit (koos siduriga (pole näidatud)) erinevates töötingimustes. Rootori asendi määrab lahendaja mõõdetud: need andmed on olulised IGBT draiveritele, et juhtida staatori pooli õigel ajal.
Püsimagnetitega elektrimootorit saab juhtida nii alalispinge (alalispinge) kui ka vahelduvvoolu (vahelduvpinge) abil.
Sünkroonmootor on üks enimkasutatavaid elektrimootoreid hübriid- või täiselektrilistes sõidukites. Seda tüüpi elektrimootor koosneb mähistega staatorist ja mitme püsimagnetiga rootorist. Rootor pöörleb sama kiirusega kui staatori magnetväli. Sünkroonmootorit saab juhtida järgmiselt:
- AC: juhitakse sinusoidse signaaliga (vahelduvvool).
- DC: juhitakse ruudu- või trapetsikujulise signaaliga (alalisvool)
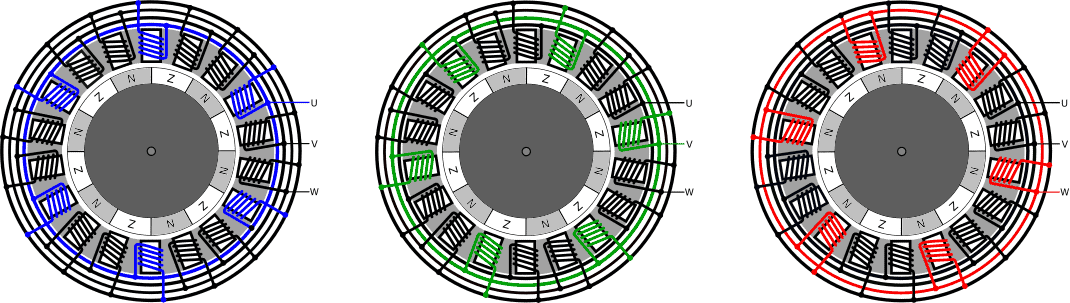
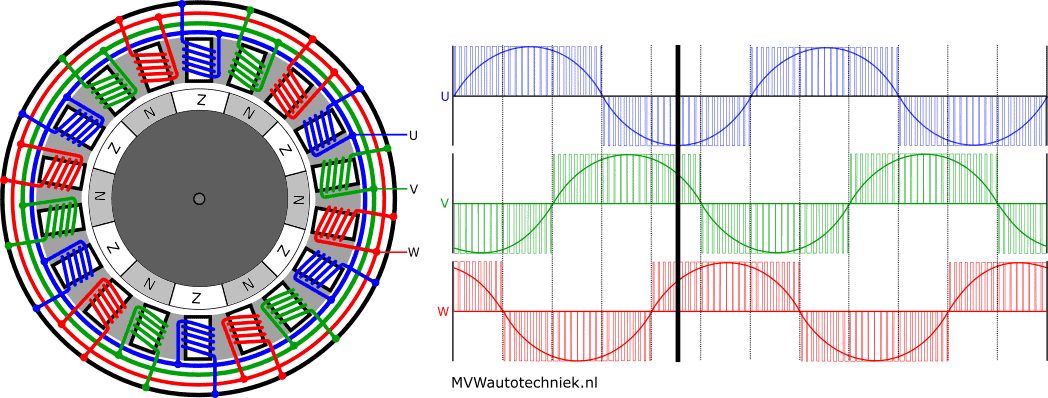
Sünkroonmootori staator koosneb kolmest staatoripoolide rühmast: U, V ja W. Iga rühm sisaldab kolme paralleelselt ühendatud kuue pooli komplekti, mis on jaotatud üle staatori kogu ümbermõõdu. Iga kolmas mähis kuulub samasse seeriasse.
- U-poolid: sinine
- V-poolid: roheline
- W mähised: punane
Rootor sisaldab mitmeid püsimagneteid. Staatori pooli vaheldumisi pingestades tekib pöörlev magnetväli. Rootor järgib pöörlevat välja ja seetõttu pöörleb.
Sünkroonmootori vahelduvvoolu juhtimine:
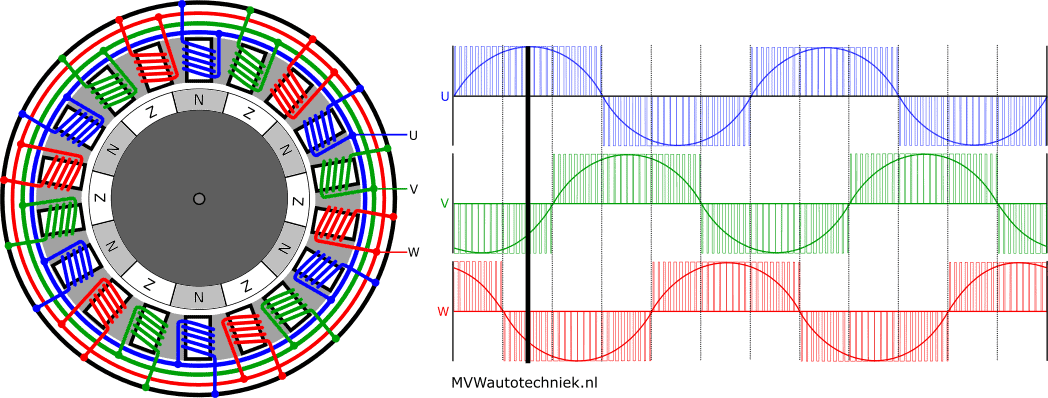
Vahelduvvoolu juhtseade kasutab sagedusega juhitavat juhtimist või siinuskommutatsiooni. Staatori mähised on varustatud vahelduva kolmefaasilise siinuslaine pingega rootori pööramiseks.
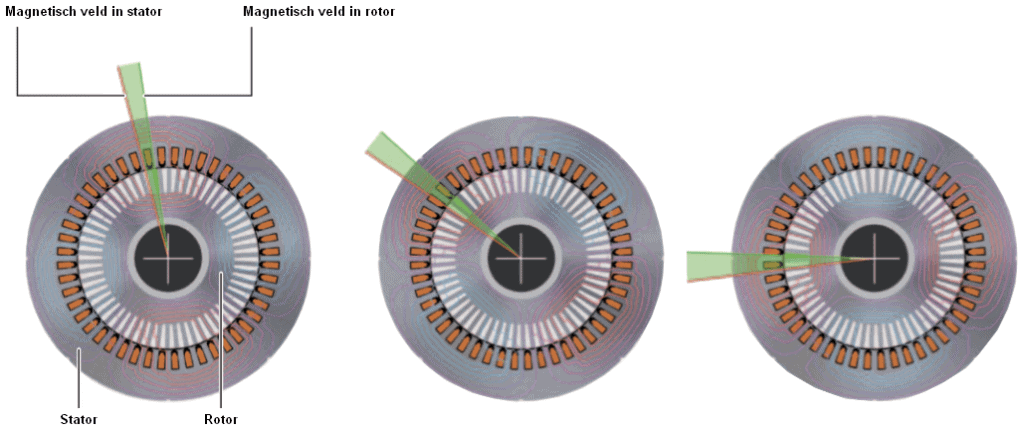
Alloleval pildil on näidatud rootori asend maksimaalse ergastusega U-mähisega. Magnetvälja mõjul on põhjapoolused asetsenud otse pingestatud U-mähiste vastas. Elektrimootori kõrval oleval graafikul olev kursor näitab mähiste juhtimist sel hetkel.
Teadmiseks: selgituses olev rootor pöörleb staatoripoolide juhtimisel rectsom.
Järgmisel pildil on siinuslaine ehk U-pooli läbiv vahelduvvool maksimaalselt negatiivne. Selle juhtimise ajal on rootori lõunapoolused otse pingestatud (U) staatoripoolide vastas.
Rootori põhja- ja lõunapooluse vahel on tegelikult väike õhuvahe. Lõunapoolusest põhjapoolusele ülemineku ajal muutub voolu suund U-mähises. Edasi:
- V-mähise (roheline) läbiv vool on peaaegu maksimaalselt positiivne; põhjapoolus on samuti peaaegu pooli vastas.
- W-pooli läbiv vool on olnud maksimaalselt negatiivne ja kasvab. Lõunapoolus on mähist mööda pöördunud.
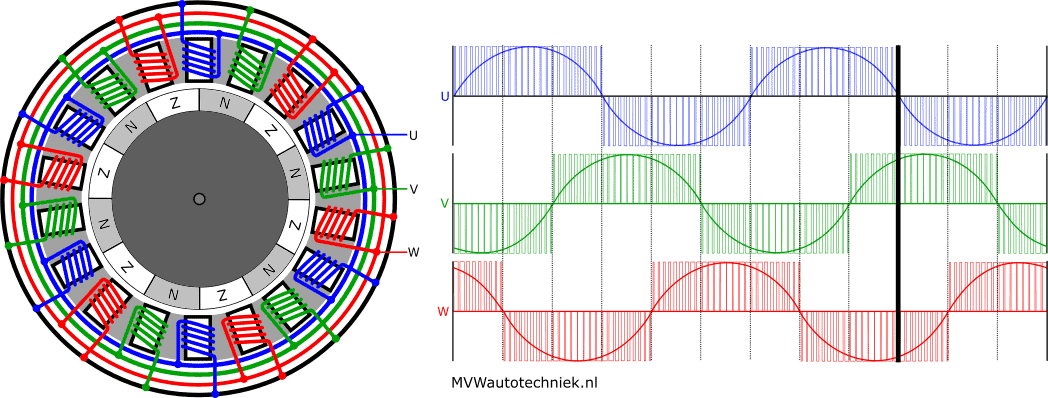
Voolu liikumisest mulje andmiseks näitab allolev animatsioon rootori pöörlemist vahelduvvoolu tõttu.
Vahelduvvoolu elektrimootor (asünkroonne, oravapuurmootor):
Oravapuur ehk lühisankru elektrimootor on asünkroonmootor. Püsimagnetitega sünkroonmootori ja asünkroonmootori erinevus on rootoris: see on pehme rauast trummel, mille juhid on pikisuunas. Rootor töötab staatoriga asünkroonselt, mis tähendab, et rootori ja staatori magnetilise kiiruse vahel on kiiruse erinevus. Staator on täpselt sama.
Asünkroonse elektrimootori rootor koosneb lühisega mähistest; U, V ja W mähised on ühelt poolt omavahel ühendatud. Kui rootor on staatori pöörlemisväljas, tekib rootori mähistes induktsioonpinge. Kuna rootori mähised on üksteisega lühises, siis läbib neid vool. See vool tekitab rootoris magnetvälja, tekitades pöördemomendi. Kuna asünkroonse elektrimootori töö põhineb induktsiooniseadusel, nimetame seda ka asünkroonmootoriks.
Edastatud pöördemoment mõjutab libisemist staatori pöörleva magnetvälja ja rootori kiiruse vahel.
Asünkroonmootoril on võrreldes sünkroonmootoriga mitmeid eeliseid ja puudusi.
Eelised:
- suhteliselt lihtne, vastupidav ja odav rootor;
- kõrge pöördemoment madalal kiirusel.
Miinused:
- väiksem võimsustihedus (massi kohta) ja efektiivsus (tõhusus). Lühises rootoripoolides esinevad voolud põhjustavad täiendavaid rootorikadusid;
- kiirust ei saa täpselt juhtida, sest see sõltub koormusest. Iseenesest ei pea see olema puudus: hea juhtimissüsteemiga saab reguleerida ka asünkroonmootori kiirust;
- kõrge käivitusvool.
Asünkroonmootori rootori asendit ja kiirust mõõdetakse a rootori asendi andur. Halli andurid annavad rootori asendi ja kiiruse edastamiseks sageli vähemalt neli impulssi ühe rootori pöörde kohta. Me ei nimeta seda tüüpi rootori asendiandurit lahendajaks, nagu sünkroonmootori puhul.
Erinevalt sünkroonmootorist ei ole rootori asendi andur rootori paigalseisu teadasaamiseks vajalik. Rootori asend on pöörlemise ajal oluline: tuleb jälgida, et pöörleva magnetvälja ja rootori vaheline libisemine ei muutuks liiga suureks. Kui pöörlev väli liigub liiga kiiresti, võib tekkida olukord, kus rootor tahab järsku teises suunas pöörata. Tekkivad jõud võivad olla mehaaniliste ja elektriliste komponentide jaoks hukatuslikud.
Mõned tootjad valivad ka asünkroonse mootori kasutamise lahendaja rakendades. Põhjus on mulle teadmata. Igal juhul on lahendaja ülitäpne nii paigal seistes kui ka joostes, mis võib täpsele juhtimisele kasuks tulla.
Sünkroonse ja asünkroonse elektrimootori efektiivsuskaart:
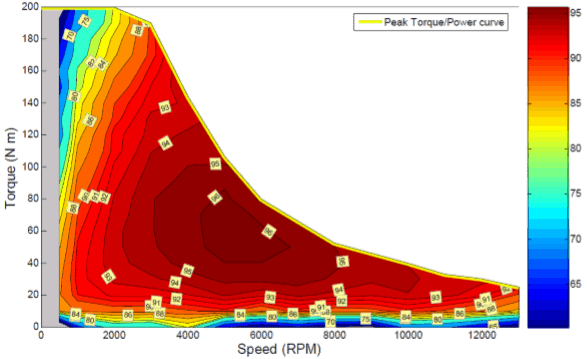
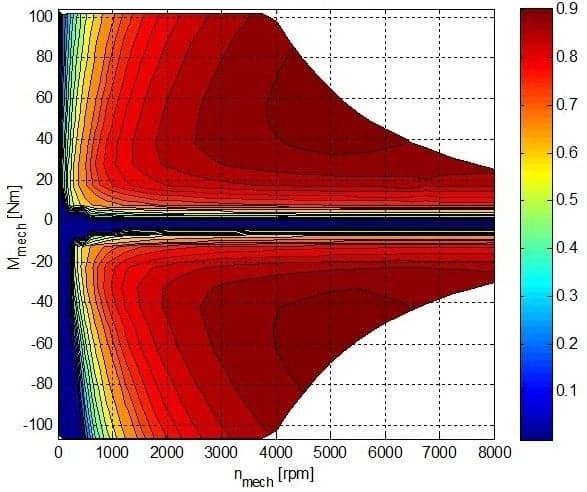
Allolevatel piltidel on näha sünkroonse elektrimootori (vasakul) ja asünkroonse elektrimootori (paremal) efektiivsus.
- Sünkroonne elektrimootor on väga tõhus. Suurel alal on efektiivsus üle 90%, tippväärtused kuni 96%. Alates 2000 p/min toimub välja nõrgenemine, mille tõttu maksimaalne pöördemoment väheneb.
- Asünkroonmootoril on madalamatel pööretel oluliselt väiksem kasutegur kui sünkroonmootoril.
Seotud lehed: