Teemad:
- Sissejuhatus
- Inverter
- Regeneratiivne pidurdamine
Eessõna:
Täiselektrilise või hübriidajamiga sõidukite elektrimootorid töötavad vahelduvvooluga (AC). Elektrimootori energia ei tule otse akust, kuna see annab ainult alalispinget (DC). Akust saadav alalispinge juhitakse akusse tagurpidi teisendatakse elektrimootori vahelduvpingeks.
Lisaks leiame muundurid mis muudavad madala alalispinge kõrgemaks pingeks (võimendusmuundur). Aku pinget saab elektrimootori jaoks "tõsteda" (650 volti) või pardaaku (14 volti) laadimiseks alandada. Samuti kasutatakse muundurit kõrgepingelt madalpingele üleminekuks, näiteks salongitarvikute varustamiseks pingega 12 või 24 volti (reisijate- või rasked tarbesõidukid). Konverteri lehe vaatamiseks klõpsake siin.
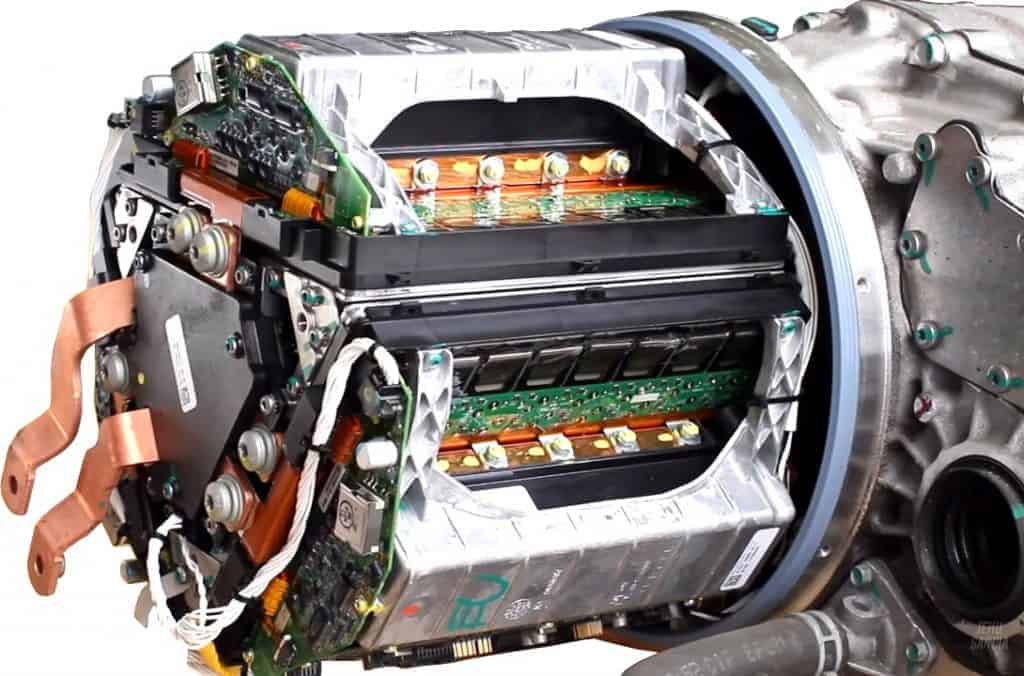
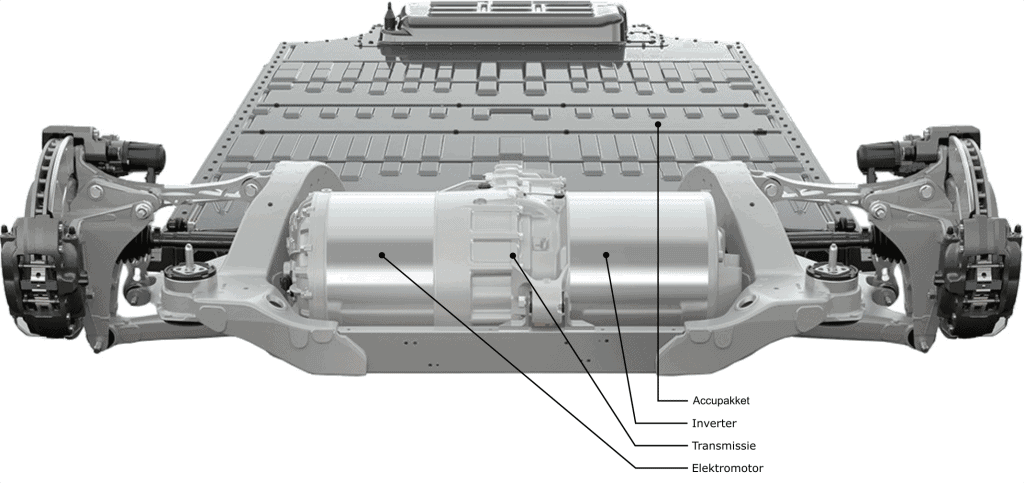
Järgnev pilt on Tesla Model S-st: inverteri sisemus ja ülevaade nn ajamiüksusest, kus inverter, jõuülekanne ja elektrimootor asuvad ühises sõlmes tagavedrustuse juures.
Inverter:
Pildil jaotises "Boost converter" on ülevaade koos võimendusmuunduriga, kaheteistkümne IGBT-ga muunduriga ja kahe elektrimootoriga (MG1 ja MG2).
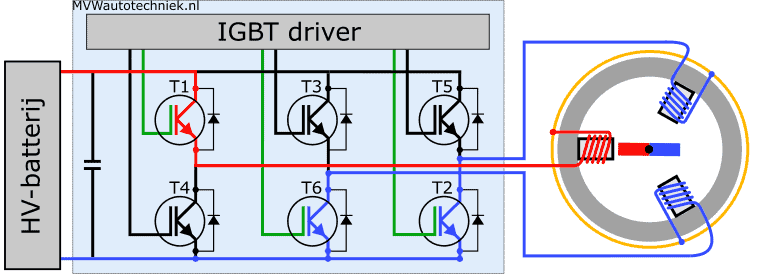
Alumisel seitsmel diagrammil on näidatud transistoride juhtimine ja voolu suund staatori poolidele ja sealt tagasi. Võimendusmuundur ja IGBT-d + MG2 on mugavuse huvides välja jäetud. Näeme seda diagrammil vasakul HV akupakett; see on kõrgepingeaku, milles on salvestatud pinge umbes 200–800 volti. Akust paremal näeme kondensaatorit. Kui HV-süsteem on aktiveeritud, reguleerib HV-kaitsesüsteem algselt takisti abil HV-akuplokist tulevat piiratud voolu. Seda tehakse kondensaatori aeglaseks laadimiseks enne, kui HV-süsteem hakkab täielikult tööle.
Lisaks näeme kuut suure võimsusega transistorit. Need on IGBT-d, mis juhivad elektrimootorit. IGBT-sid juhib juhtseade; see on tähistatud kui "IGBT draiver". Paremal näeme kolme sinise ja punase mähisega (U, V ja W) staatorit. Staatori keskel on rootor, mis paneb liikuma magnetismi, vt lõiku elektrimootori kohta.
Ülemised transistorid (T1, T3 ja T5) lülitavad HV aku positiivsed ühendused staatori poolidesse, kui transistorid on juhtseadme poolt sisse lülitatud. Alumised transistorid (T2, T4 ja T6) juhivad massid kõrgepingeaku miinusesse.
Praegu juhitavate IGBT-de väravaühendused on näidatud roheliselt. Sünkroonmootori korral "loeb" juhtseade mootori asendit rootori asendi andur et määrata, millist IGBT-d see peaks kontrollima. Rootori asendiandurit nimetatakse ka a lahendaja kutsus.
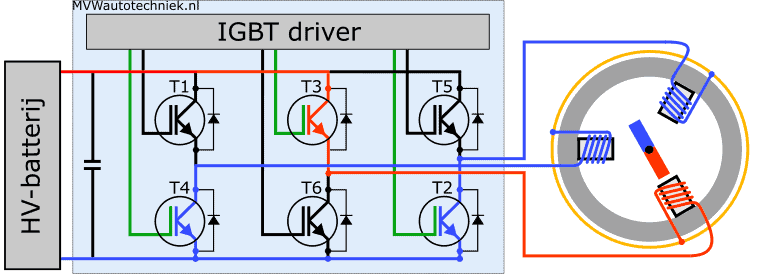
1. Kontrollitavad IGBT-d:
- T1: pluss (100% kontrollitud);
- T2: mass (50% sõidetud);
- T6: mass (50% sõidetud).
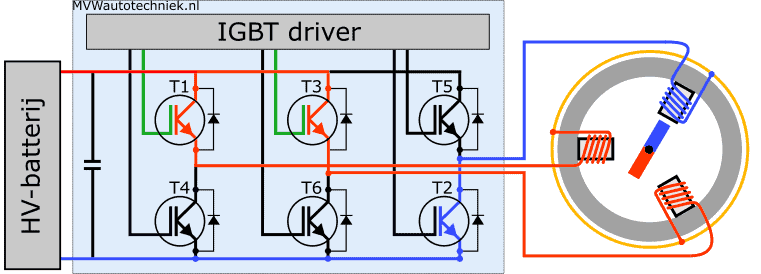
2. Kontrollitavad IGBT-d:
- T1: pluss (50% kontrollitud);
- T3: pluss (50% kontrollitud);
- T2: mass (100% sõidetud).
Rootor pöördub muutunud magnetvälja mõjul.
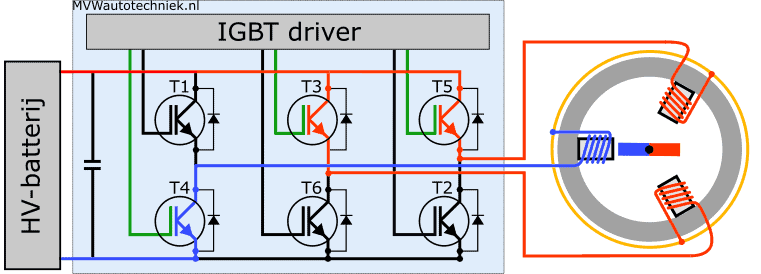
3. Kontrollitavad IGBT-d:
- T3: pluss (100% kontrollitud);
- T2: mass (50% sõidetud);
- T4: mass (50% sõidetud).
Rootor pöördub muutunud magnetvälja mõjul.
4. Kontrollitavad IGBT-d:
- T3: pluss (50% kontrollitud);
- T5: pluss (50% kontrollitud);
- T4: mass (100% sõidetud).
Rootor pöördub muutunud magnetvälja mõjul.
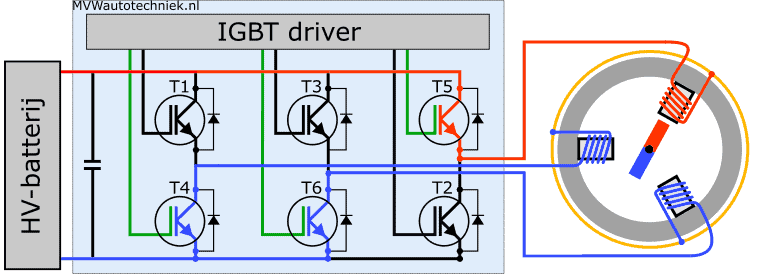
5. Kontrollitavad IGBT-d:
- T5: pluss (100% kontrollitud);
- T4: mass (50% sõidetud);
- T6: mass (50% sõidetud).
Rootor pöördub muutunud magnetvälja mõjul.
6. Kontrollitud IGBT-d:
- T1: pluss (50% kontrollitud);
- T5: pluss (50% kontrollitud);
- T6: mass (100% sõidetud).
Rootor pöördub muutunud magnetvälja mõjul.
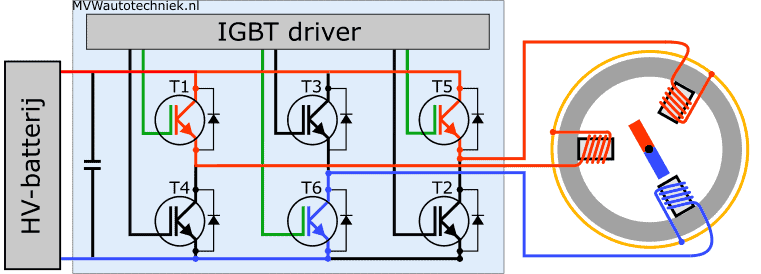
7. Kontrollitud IGBT-d:
- T1: pluss (100% kontrollitud);
- T2: mass (50% sõidetud);
- T6: mass (50% sõidetud).
Rootor on nüüd 360. olukorrast 1 kraadi (1 täispööre) pööranud. Transistorahelatega tsükkel kordub uuesti.
Inverter muudab HV aku alalispinge 1-faasiliseks sinusoidaalseks vahelduvpingeks. Kolm allolevat pilti näitavad:
- Vasakul: mähise laadimine;
- Keskmine: mähise tühjendamine;
- Paremal: pooli laadimise ja tühjendamise kõver.
Pooli laadimise ja tühjenemise saavutame transistori alust ruutlainepingega ajades. Mähise tühjenemisel magnetväli langeb ja induktsioonipinge tekitab lühiajalise induktsioonivoolu. Kustutusdiood tagab mähise tühjenemise.

1-faasiline sinusoidne kuju saadakse, muutes töötsüklit, millega transistor muutub juhtivaks. Järgmine tekst käsitleb allolevaid pilte.
- Vasak: sellel sagedusel ei saa mähis piisavalt laadida ja tekib keskmine pinge;
- Paremal: töötsüklit reguleerib IGBT-kontroller. Laadimis- ja tühjenemisaeg määrab mähise läbiva vooluhulga.
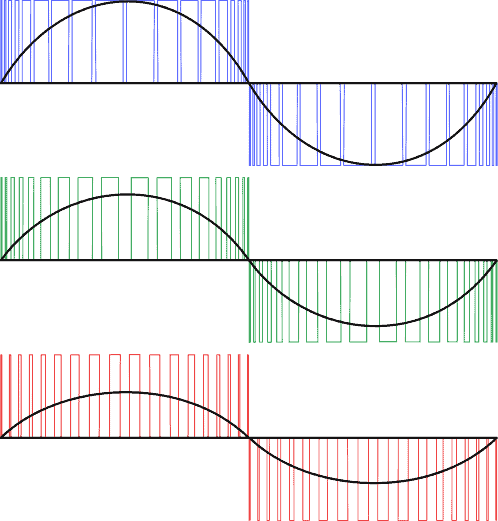
Inverteri IGBT-d lülitatakse pidevalt sisse ja välja. Sisse- ja väljalülitamise suhe toimub vastavalt PWM-juhtseadmele. Mida laiemad on impulsid (kõrgem töötsükkel), seda suurem on pooli läbiv vool ja seega võimsam elektrimootor. Keskmist voolu näitab must siinuslaine. Järgmisel joonisel on kolm sinusoidset juhtsignaali:
- Sinine: kõrge kontroll. Töötsükkel on kõrge. Vool muutub maksimaalseks.
- Roheline: keskmine kontroll. Töötsükli protsent on madalam kui kõrge kontrolli korral. Seetõttu on vool madalam.
- Punane: madal kontroll. Taas on töötsükli protsent langenud. Voolutugevus on maksimaalse kontrolliga võrreldes poole väiksem.
Siinuslaine on pool perioodi positiivne ja teine pool negatiivne. IGBT-d DC-AC inverteris on ühendatud nii, et alalispinge (DC) muundatakse vahelduvpingeks (AC). Staatori pooli läbiva voolu suund on perioodiliselt vastupidine.
sinusoidide arvu suurendamine ajaühikus suurendab rootori kiirust.
Järgmine animatsioon näitab inverteri juhtimist. Inverteri all näete kolme faasi aja kulgu. Rootor pöörleb animatsioonis kaks täispööret (360 kraadi). Iga pööre on jagatud kuueks ajaühikuks (1 kuni 6). Allpool näete värvilisi ribasid:
- Tumesinine: T1
- Roheline: T2
- Helesinine: T3
- Oranž: T4
- Roosa: T5
- Punane: T6
Keskendume aja möödumise esimesele poolpöördele:
- 0 kuni 180 kraadi pöörleb rootor pool pööret. Sel perioodil kontrolliti IGBT T1.
- 0 ja 60 kraadi vahel olid lisaks T1-le aktiivsed ka T5 ja T6.
- T1 lülitab pluss-, T5 ja T6 maanduse. Igal transistoril oli oma töötsükkel, mis varieerus vahemikus 50 kuni 100%.
- 60 kraadi juures võtab T2 üle T5: voolu suund mähises on vastupidine.
- Sel hetkel on vahelduvpinge: kuna voolu suund on muutunud, on voolutugevus negatiivne.
Vahelduvvoolu sünkroonse elektrimootori õigete mähiste juhtimiseks inverteriga vaatab inverter signaali lahendaja. Resolver registreerib rootori asendi nii paigal seistes kui ka pöörledes.
Regeneratiivne pidurdus:
Mootori pidurdamisel kasutatakse elektrimootorit generaatorina (dünamo). Sõiduki kineetiline energia muundatakse elektrienergiaks: aku laetakse.
IGBT-d lülitatakse regeneratiivpidurduse ajal välja: juht ei kontrolli neid. IGBT-de allika ja äravoolu vahelised alaldi dioodid toimivad alaldina, et muuta mootori vahelduvpinge aku alalispingeks.
Täiselektri- ja hübriidsõidukitel on lisaks elektrilise pidurduse võimalusele ka tavapärane hüdrauliline pidurisüsteem piduriklotside ja piduriketastega pidurdamiseks. Erinevad tehnikad ja juhtimispõhimõtted leiate lehelt: elektrisõidukite pidurdamine.