Teemad:
- Sissejuhatus
- Elektrimootorite tööpõhimõte
- Süsiharjadega alalisvoolu elektrimootor
- Alalisvoolu elektrimootor ilma süsinikharjadeta
Eessõna:
Elektrimootoreid leiame autos järjest rohkemates kohtades. Elektrimootoris muundatakse elektrivool liikumiseks ja soojuseks. Elektrimootori leiame peeglist ja istme reguleerimisest, aga ka klaasipuhasti mootorina klaasipuhasti mehhanismilt või käivitusmootorina. Need elektrimootorid töötavad pingel 12–14 volti. Sellel lehel piirdume sise- ja välismootoritega.
Elektrimootorid pakuvad (osaliselt) elektrilist tõukejõudu ka hübriid- ja täiselektrilistes sõidukites. Seda tüüpi elektrimootoreid käsitletakse lehel: HV elektrimootorid.
Võime alalisvoolu elektrimootorid jagada järgmisteks osadeks:
- Süsiharjadega elektrimootor (elektromagnetväli ja armatuur)
- seeria elektrimootorid;
- Paralleelsed elektrimootorid;
- Harjadeta elektrimootorid.
Elektrimootorite tööpõhimõte:
Elektrimootoris muundatakse elektrivool pöörlevaks liikumiseks. Liikumise põhjustavad kaks magnetpoolust, mis üksteist tõmbavad või tõrjuvad:
- Põhjapoolus ja lõunapoolus tõmbavad teineteist;
- Kaks põhjapoolust tõrjuvad üksteist;
- Kaks lõunapoolust tõrjuvad üksteist.
Magnetil on vastassuunaliste laengutega põhja- ja lõunapoolus. Kui see magnet pooleks murdub, pole sul järsku kaks eraldi poolust, vaid kaks uut magnetit, mõlemad põhja- ja lõunapoolusega.
Korpuse külge on kinnitatud mitu magnetpoolust (põhja- ja lõunapoolus). Põhja- ja lõunapooluse vahel on magnetväli. Väljundvõll (armatuur) pöörleb magnetvälja muutuste tõttu.
Elektrimootoris asetsevad kaks samanimelist poolust pidevalt üksteise vastas, kasutades (tavaliselt) püsimagneteid või muidu elektromagneteid. Kuna samanimelised poolused tõrjuvad üksteist, tekib liikumine.
Süsiharjadega alalisvoolu elektrimootor:
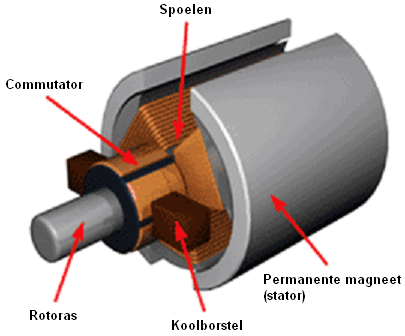
Peaaegu kõik autotehnoloogia elektrimootorid on konstrueeritud püsimagnetite ja süsinikharjadega alalisvoolumootoritena. Seda tüüpi elektrimootorites leiame järgmised magnetid:
- Püsimagnetid (üks põhjapoolus ja üks lõunapoolus): nende vahel on statsionaarne magnetväli;
- Mähised: selles tekib elektromagnetväli. Pöörlev elektromagnetväli tekitatakse mähistes.
Püsimagnetid asuvad rootorist vasakul ja paremal ning koosnevad ühest põhjapoolusest ja ühest lõunapoolusest. Selle põhja- ja lõunapooluse vahel on statsionaarne magnetväli, mis ei muutu, kui elektrimootor töötab või seisab.
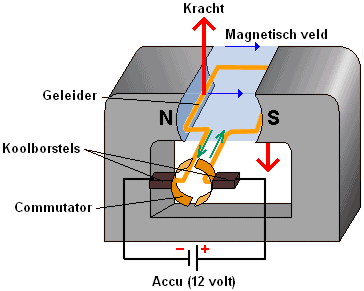
Mähistes tekib pöörlev elektromagnetväli niipea, kui vool läbib neid. Voolu tarnitakse ja eemaldatakse söeharjade kaudu kommutaatori kaudu.
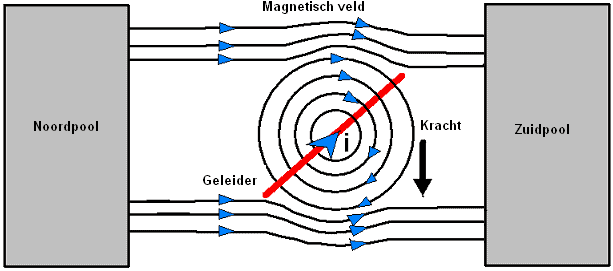
Voolu suuna ümberpööramine toimub kommutatsiooni abil: kaks söeharja lohistavad üle kommutaatori, mis koosneb pluss- ja miinuspoolest. Plusspoolel olev söehari viib voolu juhtmesse (rohelised nooled joonisel). Vool väljub juhist süsinikharja kaudu negatiivsel küljel. Juhti läbiv vool loob elektromagnetvälja.
Armatuuris (juht) tekkiva magnetismi ja välja (püsimagnetid) vahel tekib jõud (pildil punased nooled). See jõud paneb armatuuri ja kommutaatori pöörlema ümber oma telje. Seejärel tabasid söeharjad kommutaatori teist osa, muutes armatuuris voolu suunda. Magnetväli ja jõud on üles ehitatud samas suunas, nii et armatuur pöörleb uuesti ümber oma telje.
Elektrimootori (loe: armatuuri) pöörlemissuunda saame muuta söeharjade plusse ja miinuseid ümber pöörates.
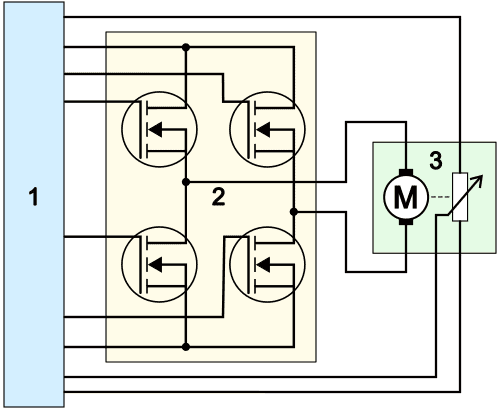
Plussi ja miinuse vahetamine on saavutatav H-silla abil.
- ECU (1) juhib samaaegselt kahte neljast transistorist või FET-ist (4);
- FET-id (2) annavad elektrimootorile (3) plussi ja maanduse. Sõltuvalt sellest, millised kaks FET-i on sisse lülitatud, on ülemine süsinikhari positiivne ja alumine lihvimine või vastupidi;
- Elektrimootori kõrval asuv potentsiomeeter registreerib asendi ja pöörlemissuuna. Kõik elektrimootorid pole potentsiomeetriga varustatud.
Vaata lehte H-sild H-silla võimalike konstruktsioonide ja lülitusviiside kohta.
Alalisvoolu elektrimootor ilma süsinikharjadeta:
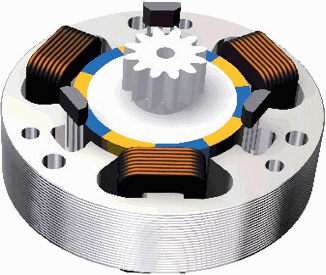
Harjadeta alalisvoolumootor on sünkroonmootor. Elektriline juhtseade on vahetanud söeharjad. Seda tüüpi elektrimootorid on väga sarnased püsimagnetitega sünkroonse vahelduvvoolumootoriga, mida kasutatakse elektrisõidukite jõuülekanne. Peamine erinevus kahe mootori vahel on juhtimine: vahelduvvoolumootorit juhitakse moduleeritud sinusoidaalse vahelduvpingega ja alalisvoolumootorit ruutlainepingega.
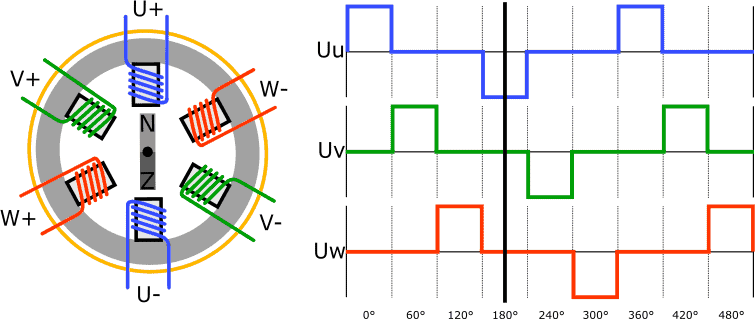
Staator sisaldab sageli kolme või kuut mähist (U, V ja W) ning rootor on püsimagnet. Alloleval pildil on näidatud alalisvoolumootori skemaatiline struktuur pinge progresseerumisega läbi kolme mähise. Tegelikkuses on rootori asendi määramiseks postide vahele paigaldatud mitu Halli andurit.
Juhtseade määrab rootori asendi põhjal, milliseid pooli see peaks juhtima.
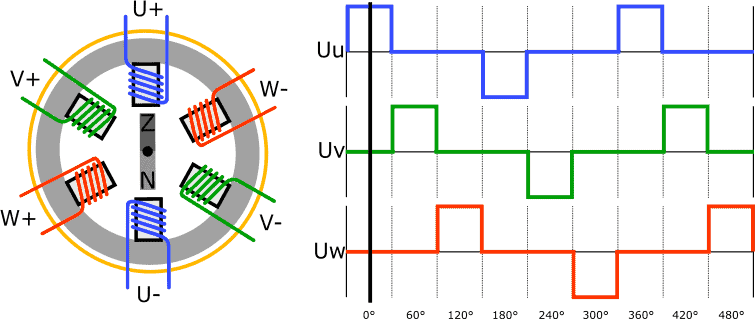
Järgmisel pildil on U+ mähis pinge all. Pooluse ümber kerimise viis määrab, kas see on põhja- või lõunapoolus. Selles näites on U+ põhjapoolus ja U- lõunapoolus.
Rootor on konstrueeritud püsimagnetina. Nagu eelmistes lõikudes kirjeldatud, asetseb või pöörleb rootor pooli läbiva muutuva magnetvälja tulemusena.
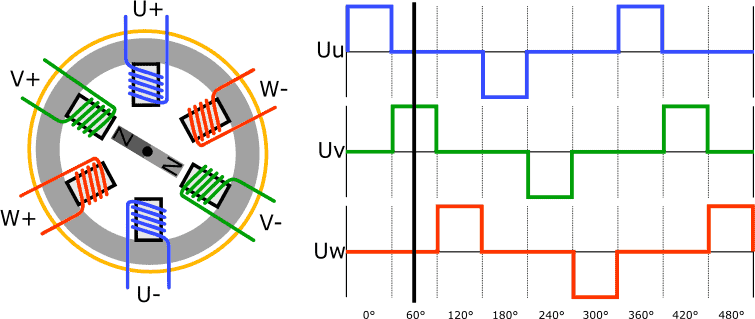
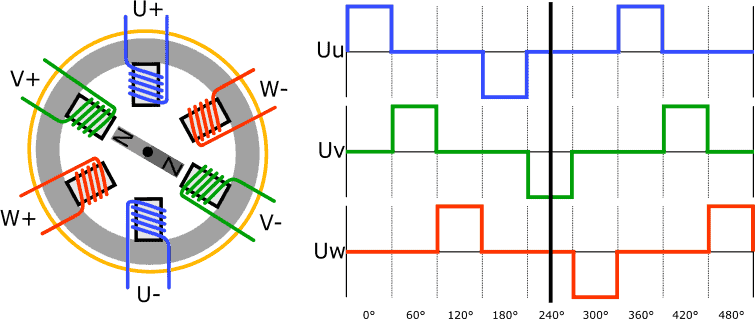
Rootori pööramiseks vastupäeva eelmisel joonisel näidatud asendist lülitatakse V-mähised pinge alla.
V+ muutub põhjapooluseks, V- lõunapooluseks. Püsimagnetrootor pöörleb;
põhja- ja lõunapoolus tõmbavad teineteist, nagu ka lõuna- ja põhjapoolus teisel pool magnetit.
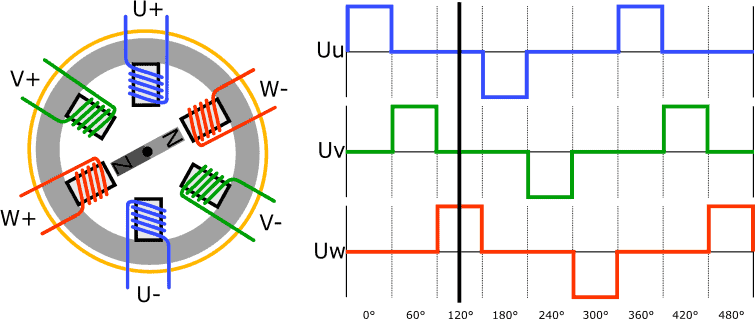
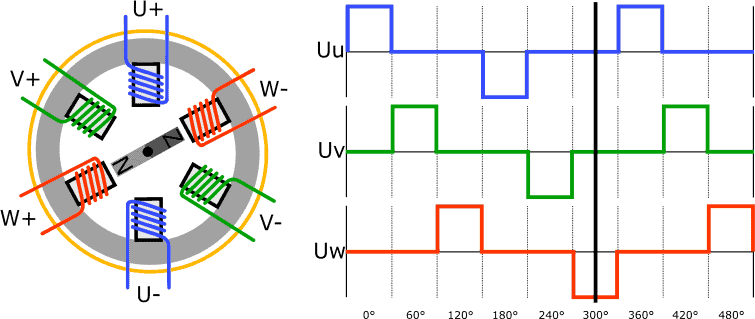
Nüüd on W-poolid pingestatud, et pöörata rootorit veel 60 kraadi.
W+ mähis muutub põhjapooluseks ja W- lõunapoolus. Rootor pöördub ja võtab uue asendi.
Järgmisel pildil olev rootor on esimesest olukorrast alates 180 kraadi pööranud; esimesel pildil oli lõunapoolus suunatud ülespoole; nüüd on see põhjapoolus.
U+ ja U-mähise polaarsus on vastupidine, mistõttu vool liigub läbi mähise vastupidises suunas. See muudab U+ lõunapooluseks ja U- põhjapooluseks.
Püsimagnetiga rootor pöörleb edasi magnetvälja muutumise tõttu.
Rootori uuesti 60 kraadi võrra pööramiseks tehakse V- põhjapoolus ja V+ lõunapoolus. Rootor võtab uue asendi.
Jällegi pöördub rootor 60 kraadi mähiste magnetvälja muutumise tagajärjel:
W-pool on põhjapoolus ja W+ on lõunapoolus.
Ülalkirjeldatud kuues olukorras on kaks mähist korraga pidevalt pinge all. Samuti leiame sageli harjadeta alalisvoolumootoreid, millel on kuue pooli asemel kolm. Kolme mähise korral pingestatakse üksteise järel ka U-, V- ja W-poolid, kuid polaarsus ei muutu.
Harjadeta alalisvoolumootor on võimas mootor, mis sobib rakendusteks, kus nii käivitamisel, keskmisel kui ka suurel kiirusel on vaja suurt pöördemomenti. Harjadeta alalisvoolumootor ja samm-mootor aetakse sageli segamini. See pole üllatav, sest mootorite töös ja juhtimises on palju sarnasusi: mõlemat mootorit juhitakse püsimagnetitega mähiste ja rootori vahel magnetvälja tekitamise teel. Kuid lisaks terminoloogiale on mõlemal mootoril olulisi erinevusi, peamiselt rakenduses ja seega ka materjalide valikus.
Sammmootor on põhimõtteliselt harjadeta alalisvoolumootor, kuid seda kasutatakse erinevas valdkonnas. Kui alalisvoolumootorit kasutatakse peamiselt pikaajaliseks suurel kiirusel töötamiseks, siis samm-mootorit näeme rakendustes, kus täpse asendi reguleerimine on kõige olulisem.
Näidatud alalisvoolumootorit juhitakse iga rootori 60° pöörde järel. Seda saab vähendada 30°-ni, kui lülitame iga juhtseadme vahel samaaegselt sisse neli mähist, saades seeläbi vahepealse asendi. Kuid samm-mootor on võimeline reguleerima sammu 1,8° kuni 0,9°. See näitab veelgi, et samm-mootor sobib väga täpsete asendite jaoks.
Erinevad versioonid, ECU juhtimismeetodid ja rakendused leiate lehelt samm-mootor.
