Themen:
- Einführung
- System Bus
- Prozessor (CPU)
- RAM-Speicher
- ROM-Speicher
Einführung:
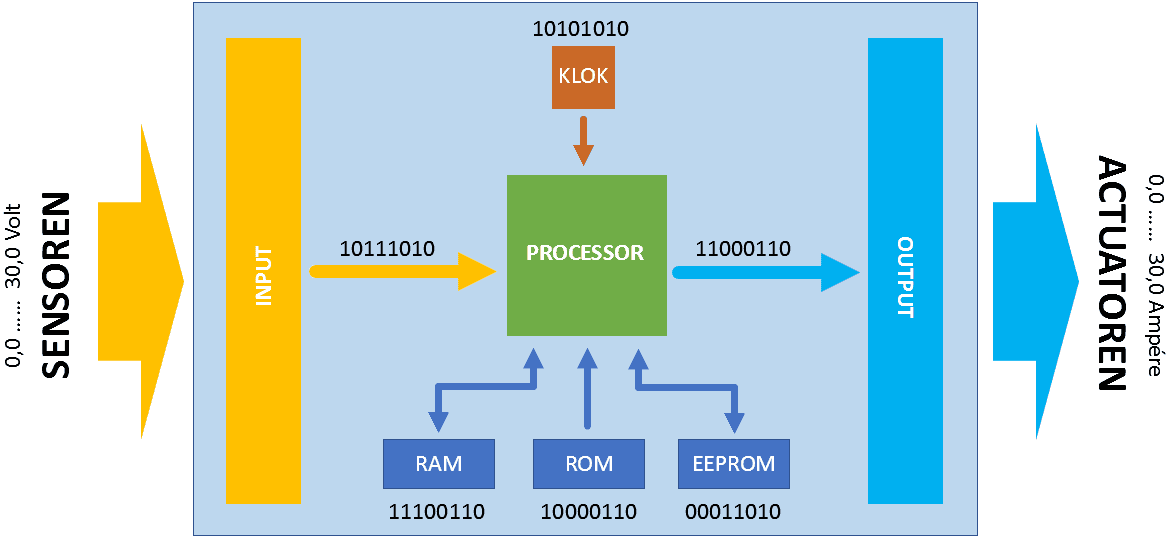
Ein Steuergerät empfängt bzw erfasst Messdaten von Sensoren, verarbeitet die Informationen und führt Berechnungen zur Steuerung der Aktoren durch. Die folgende Abbildung zeigt ein Blockdiagramm eines Steuerungssystems.
Sensoren sind Sensoren, die auf eine physikalische Größe reagieren. Die Elektronik im Sensor wandelt dieses in ein elektrisches Signal um. Das Steuergerät empfängt dieses elektrische Signal als „Eingang“ und vergleicht dieses Signal mit dem vorprogrammierten Wert. Je nachdem, wozu das Signal dient, erfolgt die Steuerung durch entsprechende Anpassung der Aktorsteuerung.
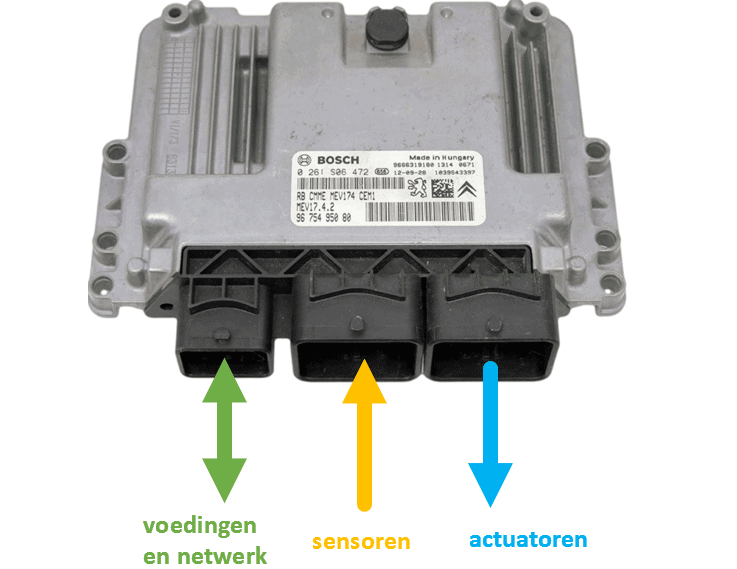
Die folgende Abbildung zeigt ein Steuergerät mit drei Steckverbindungen. Von links nach rechts: Stromversorgung und Netzwerk, Sensoren, Aktoren.
In einem Benzinmotor-Managementsystem finden wir unter anderem folgende Sensoren:
- Kurbelwellen-Positionssensor zur Messung der Kurbelwellendrehzahl;
- Kühlmitteltemperatursensor zur Messung der Erwärmung des Kühlmittels;
- Drosselklappensensoren zur Messung der Stellung der Drosselklappe und damit der Motorlast;
- MAP oder Luftmassenmesser zur Messung des Unterdrucks oder Luftstroms;
- Lambdasonde zur Messung des Sauerstoffgehalts in den Abgasen;
- der Luftdrucksensor und die Ansauglufttemperatursensoren;
- Klopfsensor, um die Zündung so weit wie möglich vorzustellen.
Die oben genannten Sensoren dienen als Eingang zur Steuerung der Einspritzdüsen und Zündspule(n). Hierzu werden alle Sensorwerte in einem vorprogrammierten Kennfeld gesucht.
Als Beispiel nehmen wir die Injektorsteuerung. Bei Leerlaufdrehzahl spritzen die Einspritzdüsen x Grad nach dem oberen Totpunkt ein.
- Bei niedriger Kühlmitteltemperatur verlängert sich die Einspritzzeit (Anreicherung);
- Bei sanfter Beschleunigung verlängert sich zudem die Einspritzzeit. Außerdem wird gemessen, wie schnell das Gaspedal betätigt wird: Bei abruptem Vollgas erfolgt eine zusätzliche Anreicherung;
- Der Unterdruck im Saugrohr beeinflusst den Einspritzzeitpunkt und die Einspritzdauer;
- Der Lambdasensor (zum Beispiel der Sprungsensor) misst, ob das Gemisch zu fett oder zu mager ist. Ist das Gemisch für mehrere Kurbelwellenumdrehungen zu mager, wird die Einspritzzeit über die Kraftstofftrimmung verlängert, bis das Gemisch wieder stöchiometrisch ist;
- Der Luftdrucksensor und der Ansauglufttemperatursensor messen den Luftdruck und die Temperatur, um den Sauerstoffgehalt in der angesaugten Luft zu bestimmen.
Die Einspritzdauer hängt also von den Werten von bis zu fünf Sensoren ab. In modernen Motoren spielen dabei noch mehr Sensoren eine Rolle.
Während und nach der Ansteuerung eines Aktors geben die Sensoren Informationen an das Steuergerät zurück. Der gemessene Wert wird mit dem gewünschten Wert in der Software verglichen. Damit lässt sich feststellen, ob eine Aktoransteuerung konstant bleiben kann, verkürzt oder verlängert werden muss. Das Steuergerät fungiert somit als Controller und bildet einen Regelkreis.
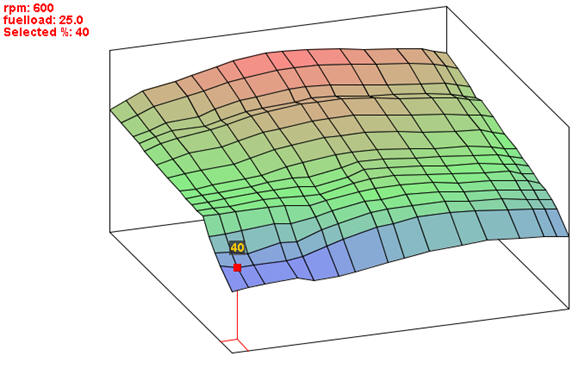
Die folgende Abbildung zeigt ein Diagramm, in dem die Grundeinspritzzeit aus der Kurbelwellendrehzahl im Vergleich zum Unterdruck im Saugrohr, der ein Maß für die Motorlast ist, ermittelt wird. Die Temperaturen und die Lambdasonde bilden einen Korrekturfaktor und haben jeweils ein eigenes Kennfeld.
System Bus:
Der Systembus stellt Verbindungen zwischen den Komponenten im Steuergerät her (siehe Abbildung unten). Oben auf dem Steuergerät finden wir die Uhr. Dieser sogenannte Oszillator erzeugt eine Rechteckspannung mit einer Frequenz von üblicherweise 16 MHz. Die Taktfrequenz bestimmt die Geschwindigkeit des Steuergerätes. Durch diesen Timer werden die Komponenten eines Regelkreises koordiniert.
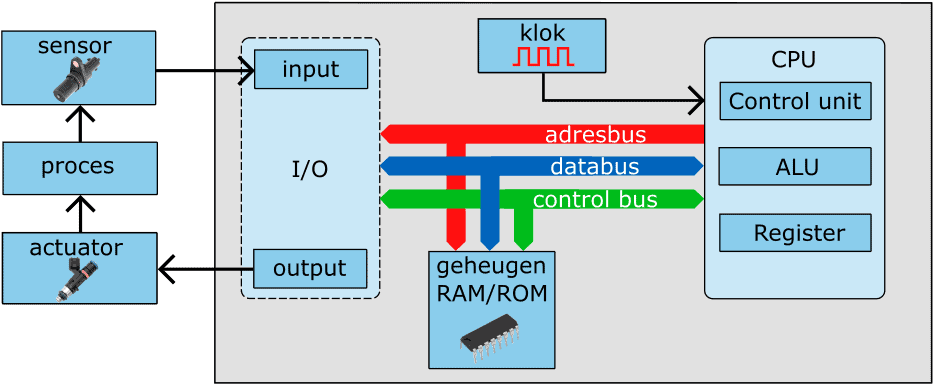
Die CPU, der Speicher und die I/O-Schnittstelle (I/O steht für: Input/Output) sind über einen Systembus, bestehend aus mehreren Anschlüssen auf der Leiterplatte, miteinander verbunden. Wir können diese unterteilen in:
- Adressbus: Dieser Bus gewährleistet die Datenübertragung vom Mikroprozessor zu bestimmten Speicherorten;
- Datenbus: Daten zwischen dem Speicher, der CPU und den Schnittstellen werden über den Datenbus transportiert;
- Steuerbus: dient als Controller, indem er Lese- und Schreibauswahlen, Anforderungen und Rücksetzungen basierend auf dem Timing der Systemuhr vornimmt.
Prozessor (CPU):
Der Prozessor (Central Processing Unit) ist das Herzstück des Computers. Die Verknüpfungsschaltungen, die aus einer enormen Anzahl von UND-, ODER- und NICHT-Gattern bestehen, werden im Steuergerät per Software aufgebaut. Bei der Herstellung des Prozessors werden eine Reihe von Anweisungen (die Software) eingebaut. Diese Anweisungen führen Aktionen aus und bringen sie in die richtige Reihenfolge. Beispiel:
- Die Buchstaben des Alphabets werden digital im Prozessor gespeichert. In Wirklichkeit werden es keine Briefe sein, sondern digitale Anweisungen, die einfache Handlungen darstellen;
- Indem wir die Buchstaben in die richtige Reihenfolge bringen, können wir Wörter bilden;
- indem wir die Wörter in die richtige Reihenfolge bringen, können wir Sätze bilden;
- Die Sätze machen die Geschichte: in Wirklichkeit das Computerprogramm.
Das Programm, um die dem Prozessor bekannten Anweisungen in die richtige Reihenfolge zu bringen, wurde vom Programmierer in die Software integriert. Dieses Programm wird in den Flash-Speicher des Steuergeräts geladen.
Beim Starten des Steuergeräts werden die Anweisungen aus dem Flash-Speicher abgerufen und vom Prozessor entsprechend der Uhr einzeln ausgeführt. Nachdem das Programm ausgeführt und beendet wurde, beginnt der Zyklus erneut.
Die zum Laden erforderlichen Daten wie z. B. die Zündzeitpunkte werden aus dem ROM-Speicher geladen. Der Prozessor bootet vom ROM-Speicher und kopiert Daten vom ROM in den RAM. Nach dem Booten ruft die CPU alle Daten und Befehle aus dem schnellen RAM-Speicher ab. Für die Zwischenspeicherung von Daten und berechneten Zwischenwerten ist ein relativ kleiner RAN-Speicher erforderlich.
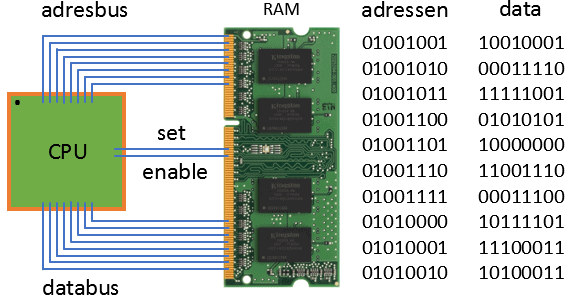
Die CPU ist über einen Adressbus und einen Datenbus mit dem Speicher verbunden.
- Set: Bits werden im RAM gespeichert
- Aktivieren: Bits werden aus dem RAM abgerufen
Zu den Datenbits und -bytes im RAM können gehören:
- Zahlen: Daten von Sensoren / Daten zu Aktoren / Berechnungen
- Adressen von Sensoren (Eingang) und Aktoren (Ausgang)
Die Daten im RAM können sein:
- Buchstaben: ASCII-Codes, Zahlen, Buchstaben, Symbole
- Anweisungen: Prozessorbefehlssatz
Der Prozessor arbeitet nach einer sogenannten ISA (Instruction Set Architecture) oder einem Befehlssatz. Die ISA ist eine Liste von Anweisungen, die vom Hersteller programmiert und vom Prozessor verwendet werden. Die ISA ist je nach Prozessor unterschiedlich und hängt stark von der Anwendung ab, für die der Prozessor verwendet wird. Nachfolgend einige Beispiele:
- LOAD ruft der Prozessor einen Wert aus dem RAM-Speicher ab
- STORE: Der Prozessor speichert einen Wert im RAM-Speicher
- ADD: Der Prozessor addiert zwei Zahlen
- CLR: Der Prozessor löscht einen Wert im RAM-Speicher
- COMPARE Der Prozessor vergleicht zwei Zahlen miteinander
- JUMP, WENN der Prozessor zu einer bestimmten Speicheradresse im RAM springt (Bedingung aus Vergleich)
- OUT sendet der Prozessor Informationen an einen Ausgang
- IN fordert der Prozessor Informationen von einem Eingang an
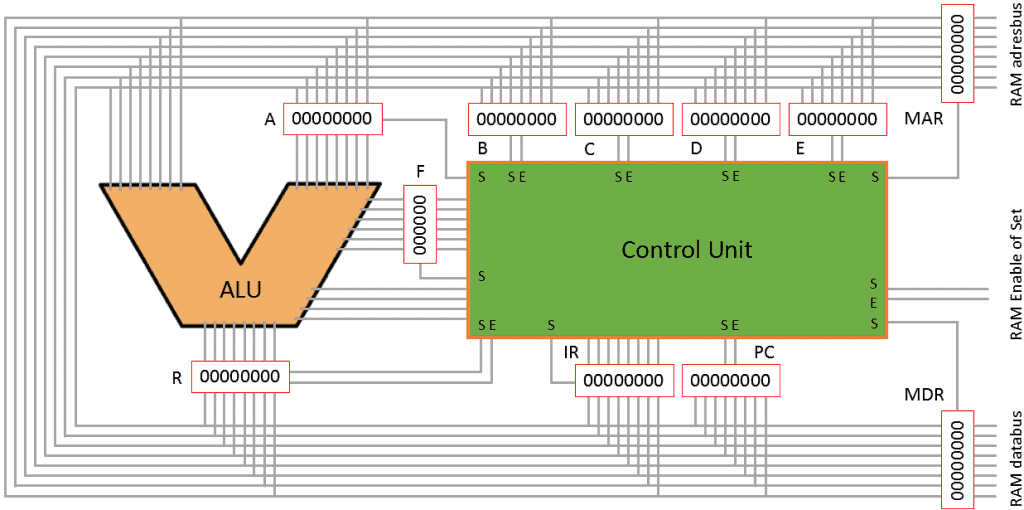
Damit ein Prozessor mit voller Taktgeschwindigkeit arbeiten kann, nutzt er den internen RAM-Speicher. Diese werden „Register“ genannt. Register sind in vielen digitalen Systemen besonders wichtige Funktionsblöcke. Sie bestehen aus einer Ansammlung von Flip-Flop-Schaltkreisen, die eine Binärzahl vorübergehend halten (und sich dadurch merken) können. Die verschiedenen Arten von Registern sind:
- A-Register: Register für den A-Eingang zur ALU
- B-Register: Register für B-Eingang zur ALU
- Arbeitsregister: Allzweckregister zur Speicherung von (Zwischen-)Ergebnissen
- Befehlsregister: Hier wird der aktuell für den Prozessor auszuführende Befehl gespeichert
- Adressregister (Programmzähler): enthält die Adresse des nächsten auszuführenden Befehls
- Flag-Register: Zahl (nach einer Berechnung) ist: Null, negativ, positiv, zu groß, gerade oder ungerade
- Gleitkommaregister: Zahl mit Nachkommastellen
- Schieberegister: Speicher, in dem sich die Daten bei jedem Taktimpuls um ein Bit verschieben
- Speicherdatenregister: Puffer zwischen CPU und RAM für Speicherdaten
- Speicheradressregister: Puffer zwischen CPU und RAM für Speicheradressen
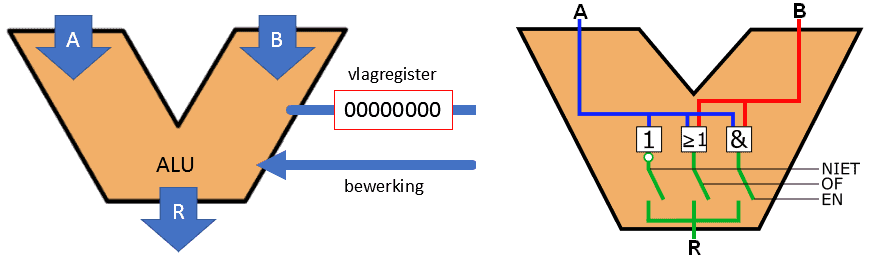
Die ALU (Arithmetic Logic Unit) führt alle arithmetischen und logischen Operationen (UND, ODER, NICHT usw.) aus.
- 2 Eingänge zu ALU: A und B
- 1 Eingabe: Welche Operation soll die ALU ausführen?
- 1 Ausgabe: R (Ergebnis) geht in ein Register
- 1 Ausgang: Flagregister
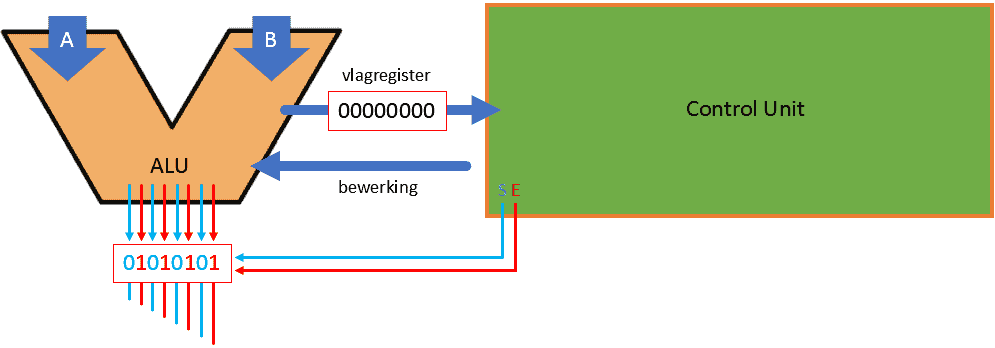
1. Die ALU möchte 01010101 senden
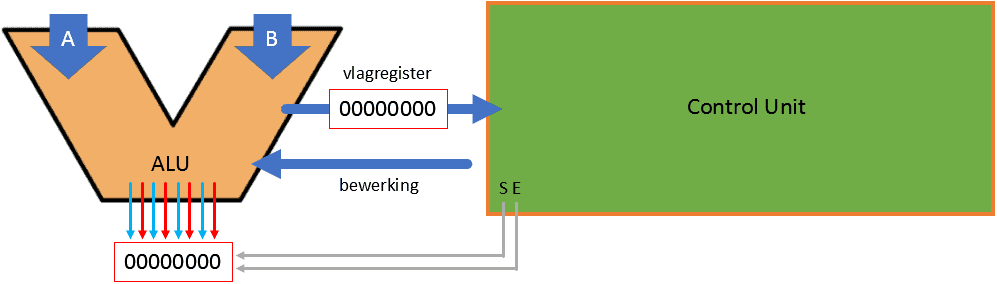
2. Zuerst muss die Steuereinheit den Satz „1“ erstellen.
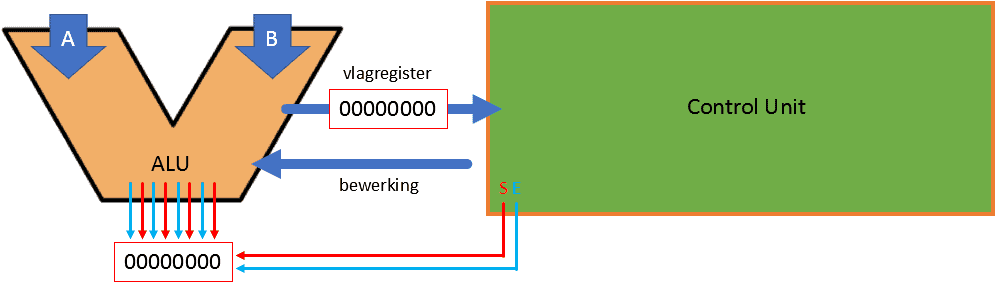
3. Das Register ist abgeschlossen
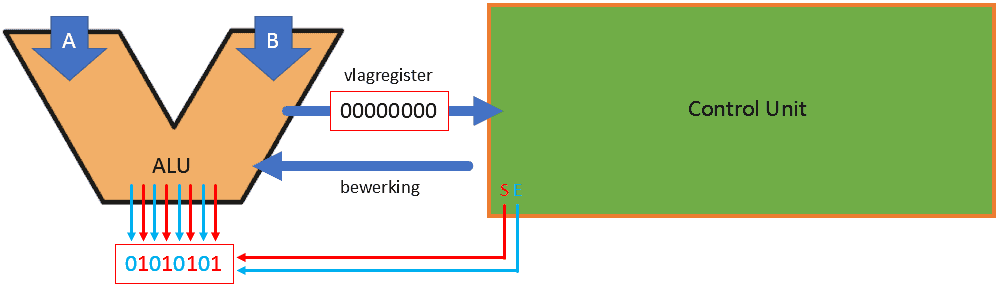
4. Danach erfolgt die Freigabe „1“.
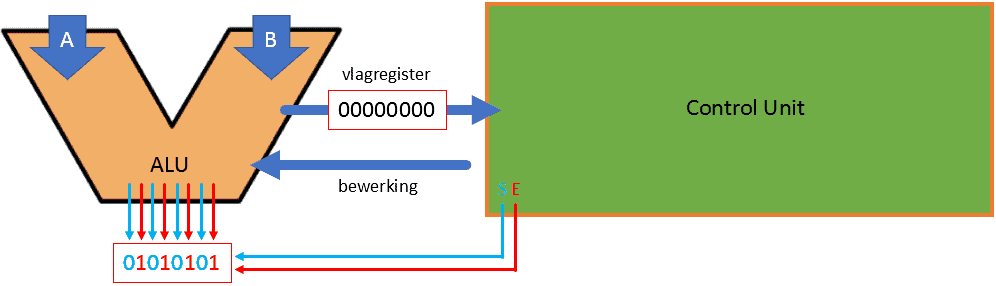
5. Die Daten von der ALU werden auf einen Bus gelegt
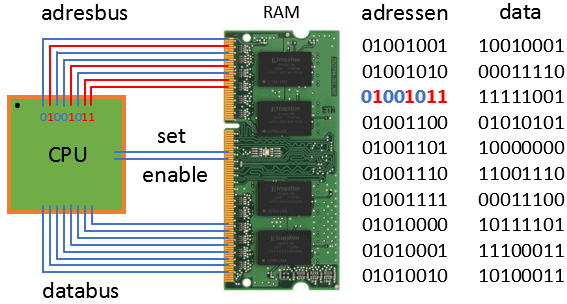
Die CPU möchte Daten aus dem RAM abrufen:
1. CPU sendet eine Adresse an RAM (01001001)
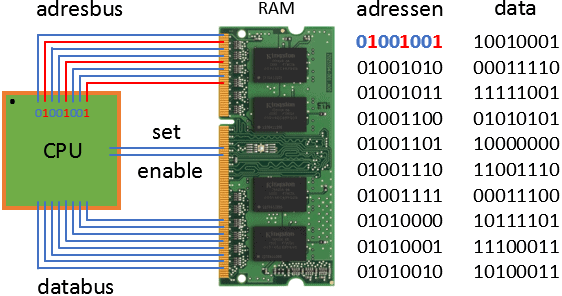
2. CPU möchte Informationen erhalten; „aktivieren“ = 1
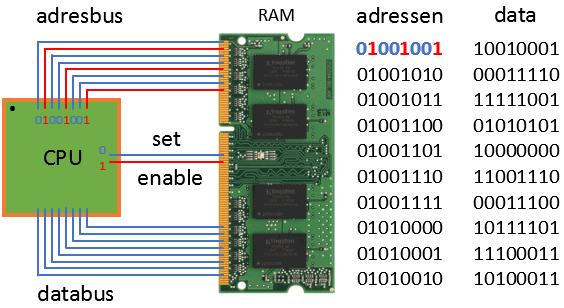
3. RAM sendet Daten von der Adresse 01001001 an die CPU
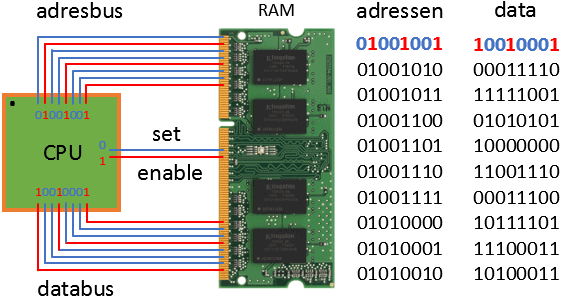
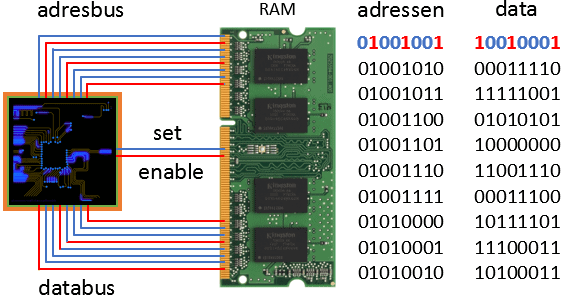
4. Die CPU verarbeitet die Informationen
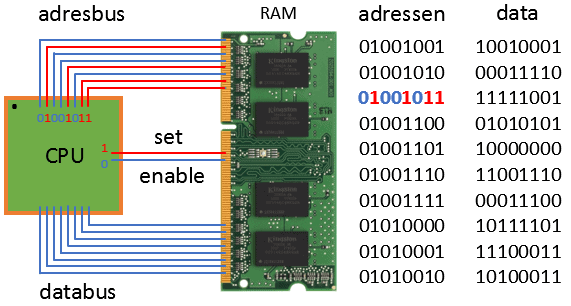
Die CPU möchte Daten im RAM speichern:
1. CPU sendet eine Adresse an RAM (01001011)
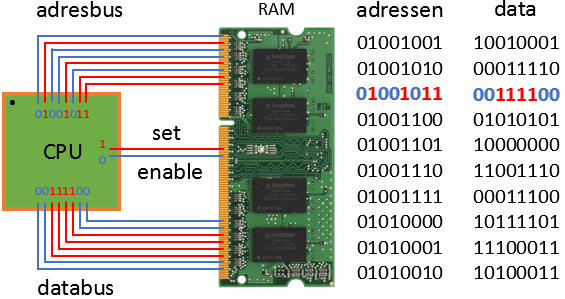
2. Die CPU möchte Informationen speichern. „set“ = 1
3. Die CPU sendet Daten (00111100) an die Adresse 01001011 im RAM.
Die Daten im RAM werden nun von: 11111001 bis: 00111100 überschrieben
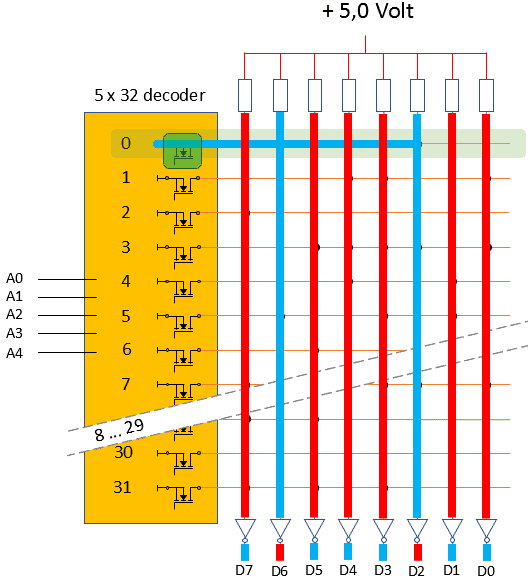
ROM-Speicher:
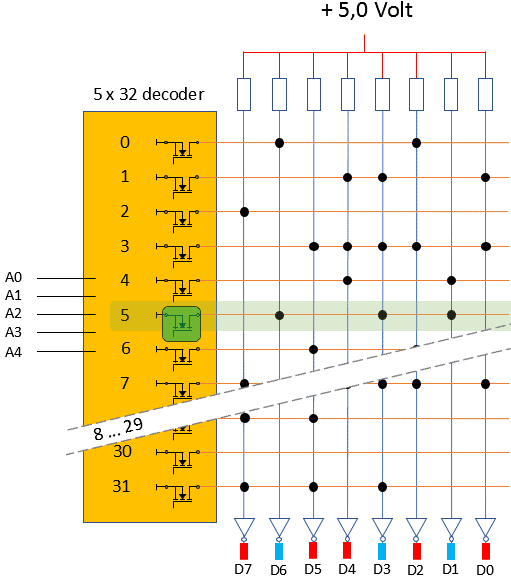
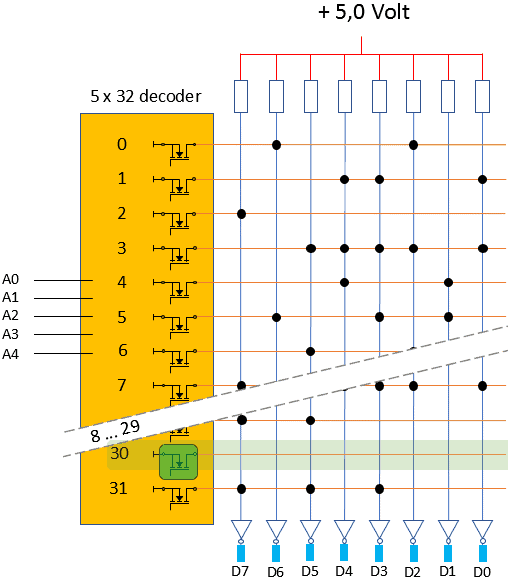
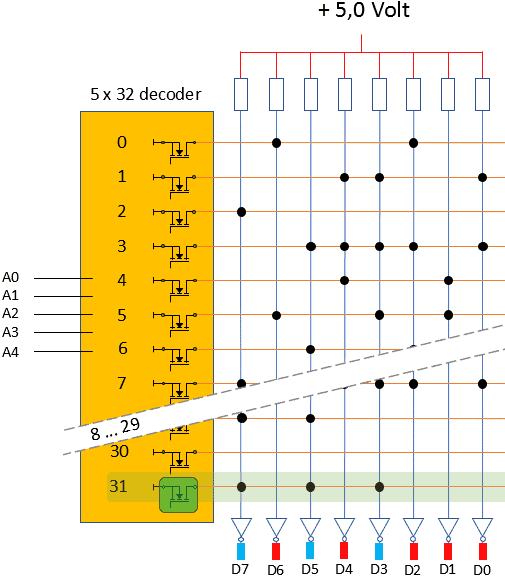
ROM ist eine Abkürzung für: Read Only Memory. Dieser Speicher wurde vom Hersteller programmiert. Die Speicherschaltung ist mit festen Anschlüssen aufgebaut. Das Steuergerät startet das Softwareprogramm (Booten) aus dem ROM-Speicher. Der ROM-Speicher ist ein langsamer Speicher. Beim Hochfahren werden die Daten vom ROM in das RAM kopiert.
Nachfolgend finden Sie vier Beispiele für das Auslesen des ROM.




Verwandte Seiten: