Themen:
- Einführung
- Signale vom Resolver
- Komponenten des Resolvers
Einführung:
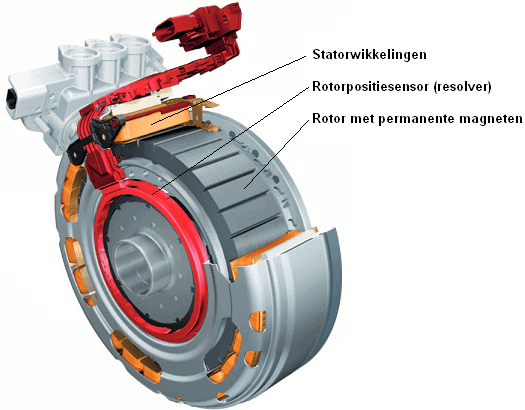
Für den Betrieb der Synchron-Elektromotor Es ist wichtig, dass die richtige Spülung erfolgt Wandler werden kontrolliert. Um zu bestimmen, welche Spule (U, V oder W) mit Strom versorgt werden soll, liest das Wechselrichter-ECU die Position des Rotors, die vom Rotorpositionssensor, auch „Resolver“ genannt, gemessen wird.
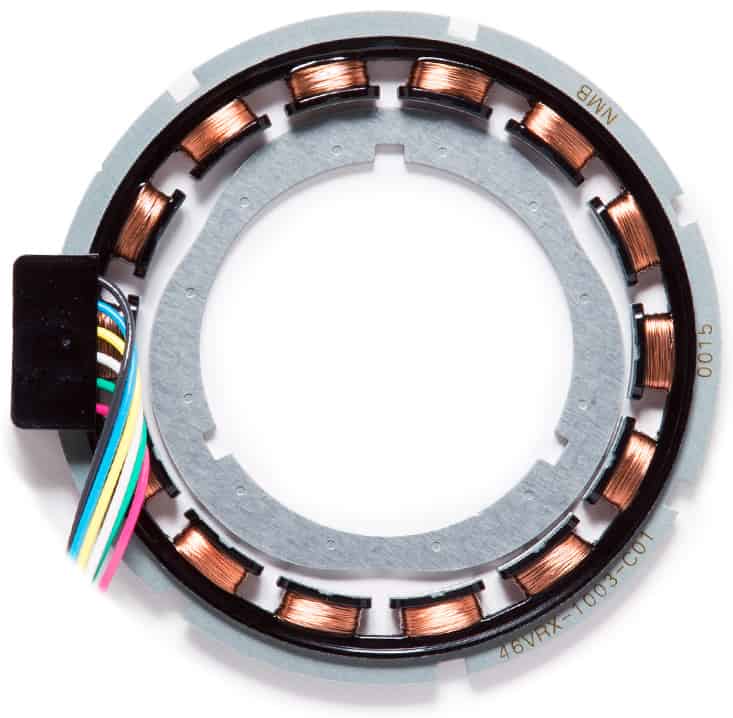
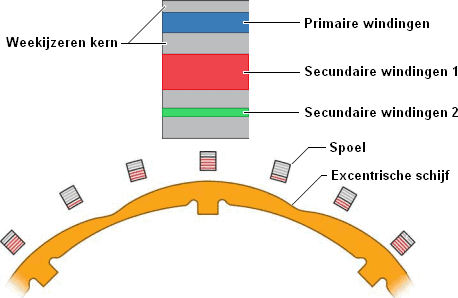
Der Resolver besteht aus einem Außenring mit mehreren Spulen auf der Innenseite einer rotierenden Exzenterplatte. Der Abstand zwischen der Exzenterplatte und den Spulen ändert sich während der Drehung ständig.
Signale vom Resolver:
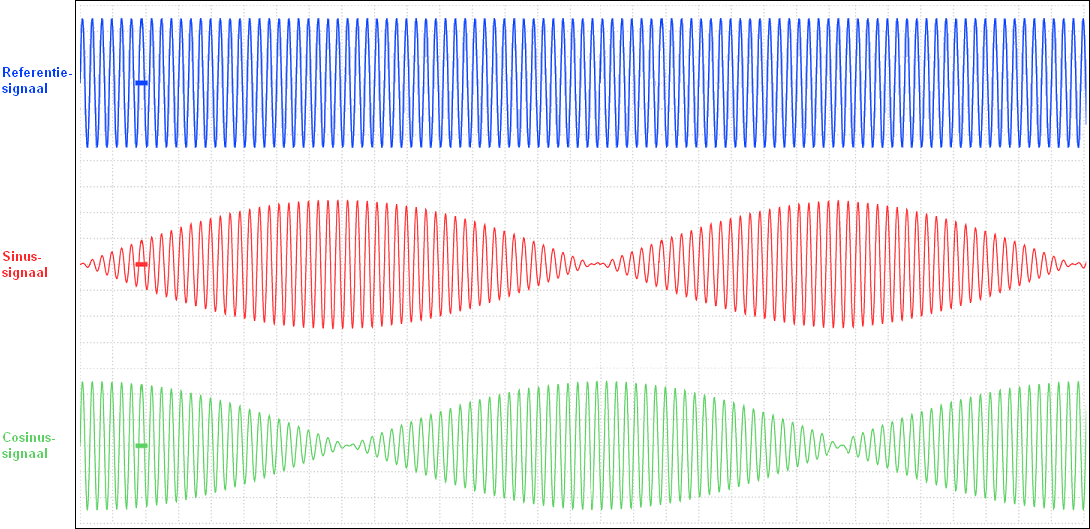
Das Steuergerät versorgt den Resolver mit einem Referenzsignal. Durch den Luftspalt zwischen einer Spule und dem Exzenter entsteht eine hohe oder niedrige sinusförmige Wechselspannung. Bei einer hohen Amplitude im roten oder grünen Sinussignal (siehe Abbildung unten) ist der Luftspalt zwischen Exzenter und Spule klein.
Der Resolver funktioniert sowohl im Stillstand als auch bei laufendem Elektromotor: In beiden Fällen muss das Steuergerät wissen, in welcher Position sich der Rotor befindet.
Das Bild unten zeigt die theoretischen Signale. In Wirklichkeit ist die Frequenz viel höher, sodass die Variation in der Amplitude der Sinus- und Cosinussignale deutlich sichtbar ist.
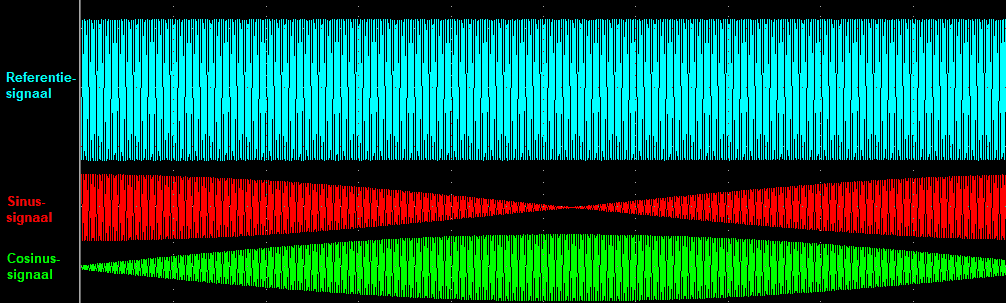
Die beiden Bilder unten zeigen eine tatsächliche Messung an einem Resolver. Auch hier sehen wir oben das Referenzsignal und unten die Sinus- und Cosinussignale. Das erste Bild zeigt den Stillstand: Der Elektromotor läuft nicht. Die Höhe des Sinussignals und des Cosinussignals bleibt konstant. Anhand der Höhe dieser Wechselspannung weiß das Steuergerät, wo sich der Rotor im Stillstand befindet.
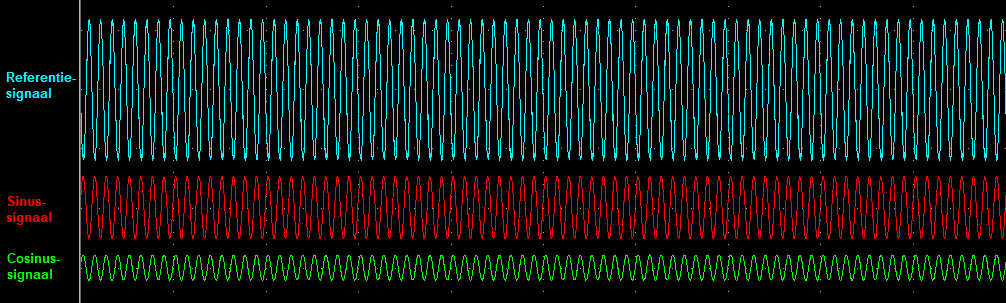
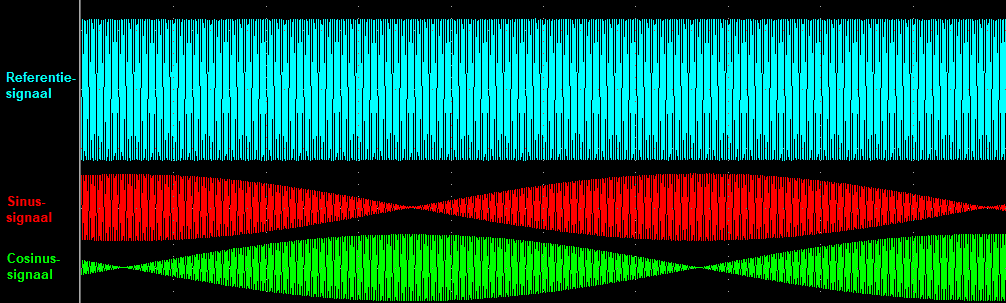
In den nächsten beiden Bildern wurde die Zeit pro Teilung reduziert. Die Frequenz des Referenzsignals am Resolver bleibt unverändert, wird aber bei der Messung über einen größeren Zeitraum gemessen. Dadurch sehen wir, dass sich die Amplituden der Sinus- und Cosinussignale deutlich ändern. Das erste Bild wurde bei niedriger Rotorgeschwindigkeit und das zweite bei erhöhter Geschwindigkeit gemessen. Mit zunehmender Geschwindigkeit nimmt die Frequenz der Sinus- und Cosinussignale zu (mehr Signale pro Zeiteinheit), die Amplitude (die Höhe der Wechselspannung) bleibt jedoch konstant.
Komponenten des Resolvers:
Der Resolver des VW E-Golf enthält 30 in Reihe geschaltete Spulen. Jede Spule im Resolver besteht aus einem Weicheisenkern mit drei verschiedenen Wicklungen: Primärwicklung, Sekundärwicklung 1 und Sekundärwicklung 2.
Die Primärspule (blau) wird mit einer hochfrequenten Wechselspannung versorgt.
Die Anzahl der Sekundärwindungen (1 rot, 2 grün) ist bei jeder Spule unterschiedlich.
Wenn sich die Nocke der Exzenterplatte entlang der Spule bewegt, wird die Induktivität in den Sekundärwicklungen verstärkt. Aufgrund der Windungszahl der Sekundärwicklungen 1 und 2 in jeder Spule ergeben sich auch die unterschiedlichen Spannungen in den Sekundärwicklungen. Die ECU im Wechselrichter kann anhand der Spannungen der Sekundärwicklungen 1 und 2 die Position des Rotors berechnen.
Die Justierung des Resolvers am Rotor ist sehr präzise: Viele Hersteller schreiben vor, dass bei Problemen mit dem Resolver der gesamte Elektromotor ausgetauscht werden muss. Nach einer (versehentlichen) Demontage des Resolvers oder dem Lösen der Schrauben an der Außenseite des Elektromotorgehäuses lässt sich der Resolver nicht mehr korrekt zusammenbauen. Auch in diesem Fall schreiben viele Hersteller den Austausch des Elektromotors vor.
Die genaue Rotorposition eines Synchronmotor muss im Stand und während der Fahrt bekannt sein. Wenn der Sensor defekt ist, kann das Fahrzeug nicht mehr fahren.
Van de Asynchronmotor andererseits ist keine Überwachung der Rotorlage notwendig. Der Rotorlagesensor gibt pro Rotorumdrehung vier Impulse ab. Diese Messung überwacht den maximalen Schlupf zwischen dem rotierenden Magnetfeld zwischen Stator und Rotor. Als Sensor wird häufig der Hall-Sensor verwendet. Der Hallsensor sendet beim Drehen des Rotors Impulse an die ECU, kann aber im Gegensatz zum Resolver des Synchronmotors keine Messung im Stillstand durchführen. Manchmal entscheiden sich Hersteller auch dafür, den Resolver des Synchronmotors als Rotorpositionssensor zu verwenden.
Verwandte Seiten: