Themen:
- Sonnenrad, Träger und Hohlrad
- Automatisches Getriebe
- Getriebe mit Planetengetriebe
- Berechnen Sie das Übersetzungsverhältnis des ersten Gangs
- Berechnen Sie das Übersetzungsverhältnis des zweiten Gangs
- Berechnen Sie das Übersetzungsverhältnis des dritten Gangs
Sonnenrad, Träger und Hohlrad:
Ein Planetengetriebe besteht aus mindestens einem Zahnradsatz mit jeweils einem Sonnenrad, einem Träger und einem Hohlrad. Daher sind Grundkenntnisse über die Funktionsweise des Planetengetriebes erforderlich (z. B. Drehen des Sonnenrads, des Trägers mit Satellitenrädern und des Hohlrads, siehe Seite). Automatikgetriebe).
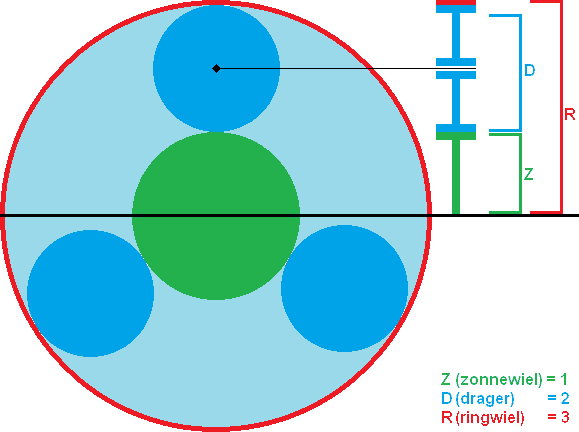
Unten sehen Sie ein Bild eines Zahnradsatzes, bei dem das Sonnenrad grün, der Träger mit den Satellitenrädern blau und der Zahnkranz rot ist. Es ist deutlich zu erkennen, dass der Zahnradsatz zweigeteilt ist. Die Berechnung erfolgt mit Gleichungen, daher spielt es keine Rolle, ob alles durch zwei geteilt wird. Schließlich bleiben die Proportionen gleich.
Weiter auf dieser Seite rechnen wir mit den Übersetzungsverhältnissen Z, D und R. Indem wir den Linien folgen, die verschiedene Planetensysteme verbinden, kann aus den Übersetzungsverhältnissen aller Z, D und R das Gesamtübersetzungsverhältnis des jeweiligen Gangs ermittelt werden.
Automatikgetriebe:
Ein herkömmliches Automatikgetriebe funktioniert durch das Umschalten zwischen den verschiedenen Planetengetriebesystemen, siehe Kapitel Automatikgetriebe.
Nachfolgend finden Sie eine schematische Darstellung von vier Sätzen Planetengetriebesystemen in einem Automatikgetriebe. Es gibt drei Systeme für die Vorwärtsgänge und eines für den Rückwärtsgang. Die rote Linie zeigt die Richtung der Kräfte durch das Automatikgetriebe an; von links (Motorseite mit Drehmomentwandler) über den kompletten Teil mit Planetensystemen (schwarze Linien) bis zur Kupplung der Propellerwelle. Wenn Sie sich die Systeme im Getriebe genau ansehen, werden Sie feststellen, dass das obige Bild davon abgeleitet ist. Im Getriebe kommen vier Systeme mit jeweils einem Z, D und R (Sonnenrad, Träger und Hohlrad) zum Einsatz.

Die Planetengetriebesysteme sind oberhalb und unterhalb der Mittellinie symmetrisch. Es geht nicht anders, denn der Innenraum dreht sich während der Fahrt. Um einen Einblick zu bekommen, was passiert, wenn ein Gang eingelegt wird, wurden die angetriebenen Teile im Planetensystem des Bildes unten auch rot hervorgehoben:

Im Bild oben ist Gang 1 eingelegt. Um den ersten Gang einzulegen, muss eine Kupplung geschlossen sein. Dieser Link wird blau angezeigt. Bei geschlossener Kupplung und einer Abtriebsseite des Planetensystems muss sich auch ein Teil drehen. In diesem Fall bestimmen die Abmessungen der Teile das Übersetzungsverhältnis (denken Sie an ein kleines Eingangszahnrad und ein großes Ausgangszahnrad; das große Zahnrad dreht sich dann langsamer. Wenn das große Zahnrad doppelt so viele Zähne hätte wie das kleine Zahnrad, dann das Verhältnis wäre 1:1).
Dies gilt grundsätzlich auch für das Automatikgetriebe; Die Abmessungen von Hohlrad, Sonnenrädern und Satellitenrädern sind bei allen vier Systemen unterschiedlich. Jetzt können Sie sich wahrscheinlich vorstellen, dass sich die Drehzahl der Abtriebswelle geändert hat, wenn eine andere Kupplung bestromt wird (z. B. das System links).
Weiter auf dieser Seite erklären Bilder, Erklärungen und Berechnungen, wie die Planetengetriebe im Automatikgetriebe während der Fahrt geschaltet werden.
Getriebe mit Planetengetriebe:
Wir schauen uns nun die obere Hälfte des Getriebes an (da der Kasten oben und unten symmetrisch ist, siehe Bild unten). Aus diesem Bild ermitteln wir später auf der Seite die Übertragungen. Über den Systemen steht, um welche Nummer es sich handelt; von 1 bis 3 und System R (umgekehrt).
Jede Galaxie hat ihr eigenes Z, D und R. Dies ist im Bild nicht dargestellt, aber wenn Sie sich das Bild oben auf dieser Seite noch einmal ansehen, werden Sie es erkennen. Dies wird später auf dieser Seite als bekannt angesehen.
Unten links im Bild sehen Sie die Kupplung „K4“, diese Kupplung sorgt dafür, dass zwei Seiten des Systems gleichzeitig verbunden sind; System 3 ist mit den Systemen 1 und 2 verbunden. Es wurden keine anderen Verbindungen geschlossen, sodass das gesamte System „blockiert“ ist. Die Motordrehzahl wird ohne Übersetzung 1 zu 1 auf die Räder des Fahrzeugs übertragen; Wir nennen das preisdirekt. Dies ist im vierten Gang.
Bei Fahrzeugen mit Schaltgetriebe ist der vierte Gang oft auch ein Direktgetriebe. Auch hier wird die Motordrehzahl 1 zu 1 auf die Räder übertragen.
Der Drehzahlunterschied zwischen Eingangswelle (Motor oder Drehmomentwandler) und Ausgangswelle (Fahrzeug) wird als Übersetzungsverhältnis bezeichnet.

Der erste Gang ist eingelegt.
Durch die Sicherung des Trägers des Systems I (mittels Kupplung K1) kann eine Kraft vom Sonnenrad auf den Träger übertragen werden. Der Träger ist mit dem Fahrzeug verbunden, sodass nun eine direkte Verbindung zwischen Motor und Getriebe besteht. Die Abmessungen der Teile bestimmen ein Übersetzungsverhältnis (dazu später mehr).
Die rote Linie zeigt den Kraftverlauf an. Die grüne Linie zeigt an, welche anderen Komponenten ausgeführt werden, da diese direkt mit der roten Linie verbunden ist. Diese Teile drehen sich zwar, aber da keine Kupplung aktiviert ist, passiert ihnen nichts. Sie laufen einfach im Leerlauf herum. Die blaue Linie zeigt, was fixiert ist, wenn die Kupplung K1 bestromt ist. Dann ist nicht nur der Träger von System 1 fixiert, sondern auch der Träger von System 3 und das Sonnenrad von System R sind blockiert.

Wie erläutert, wird die Kupplung K1 beim Schalten in den ersten Gang bestromt. Beim Schalten in den zweiten Gang wird die Kupplung K1 geöffnet und eine andere Kupplung aktiviert. Dies ist in der Tabelle ersichtlich.
Beim Schalten in den zweiten Gang wird die Kupplung K2 bestromt. Anschließend wird der Zahnkranz des Systems 2 fixiert. Da das Sonnenrad von System 2 feststeht und das Sonnenrad angetrieben wird, dreht sich der Träger. Dieser Träger wird wiederum System 1 antreiben. Im System 1 wird das Hohlrad dieses Mal nicht blockiert, sondern von einem anderen System angetrieben. In diesem Fall wird die Abtriebsgeschwindigkeit (Linie des Fahrzeugs) daher eine niedrigere Geschwindigkeit aufweisen als beim Schalten des ersten Gangs.

Dies wird auf dieser Seite mit Bildern, Erklärungen und Berechnungen weiter verdeutlicht.
Berechnen Sie das Übersetzungsverhältnis des ersten Gangs:
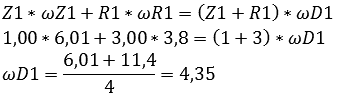
Gemäß der folgenden Tabelle ist die Verbindung K1 geschlossen. Der Zahnkranz ist somit blockiert. Die Antriebskraft vom Motor gelangt über das Sonnenrad und über den Träger zum Fahrzeug. Auch die Übersetzungsverhältnisse sind angegeben, nämlich 1,00 für das Sonnenrad und 3,00 für das Hohlrad des Systems 1. Damit rechnen wir.
Die Grundformel zur Berechnung der Übersetzungsverhältnisse von Planetengetrieben lautet wie folgt:
ω steht für Omega und ist das Winkelgeschwindigkeit beim Drehen.
Da wir mit System 1 rechnen, setzen wir hinter alles eine 1. Wir ändern diese Nummer für die folgenden Systeme. Insbesondere bei mehreren Systemen (wo ein System das andere antreibt) muss dies beachtet werden, da es sonst sehr unübersichtlich wird.
Unten ist das Diagramm des ersten Gangs. Der Übersichtlichkeit halber sind Z (Sonnenrad), D (Träger) und R (Hohlrad) blau eingezeichnet.


Wir tragen nun die Grundformel für das erste System ein. Die Omegas sind unbekannt und der Träger steht still. Deshalb können wir hierfür nichts ausfüllen. Z1 und D1 sind bekannt, daher werden wir sie ergänzen. R1 ist stationär, also streichen wir das durch. Wir fügen der Formel nichts hinzu.
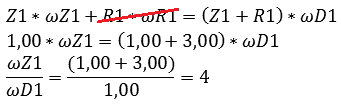
Sie sehen nun, dass die Übersetzung des ersten Gangs 4 beträgt.
In der Automobiltechnik kommt das nie vor, er würde immer leicht über oder unter 4 liegen, da sich sonst die Zahnräder immer auf den gleichen Flächen berühren (zusätzlicher Verschleiß). Aber hier ist es einfacher, als Beispiel zu rechnen. Sie können jetzt auch sehen, dass die Omegas bekannt sind!
ωZ1 = 4
ωD1 = 1
Diese Omegas sind die Winkelgeschwindigkeiten der Achsen im System. Im ersten Gang sind die Omegas nicht wirklich wichtig, aber bei der Berechnung von Doppelantriebssystemen (wie im zweiten Gang deutlich wird) sind sie wichtig.
Berechnen Sie das Übersetzungsverhältnis des zweiten Gangs:
Bei der Berechnung des Übersetzungsverhältnisses des zweiten Ganges muss berücksichtigt werden, dass das erste System doppelt angetrieben ist; Das Sonnenrad von System 1 wird vom Motor angetrieben und der Träger wird von System 2 angetrieben. Dies führt nun zu einer anderen Fahrzeuggeschwindigkeit als bei stillstehendem Hohlrad (z. B. beim ersten Gang).

Bei der Berechnung beginnen wir immer mit dem System, das nur angetrieben wird. In diesem Fall handelt es sich um System 2, da der Antrieb nur über das Sonnenrad vom Motor erfolgt.
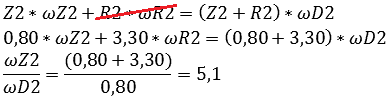
Die vom zweiten System durchgeführte Übertragung ist 5,1. Dabei handelt es sich nicht um die Übersetzung zwischen Motor und Rädern, sondern zwischen Motor und System 1. Nun berechnen wir das Übersetzungsverhältnis von System 1 mit den Daten von System 2, da die Omegas nun bekannt sind:
ωZ2 = 4,1
ωD2 = 0,8
Wenn Sie sich nun das Diagramm ansehen, sehen Sie, dass die Sonnenräder der Systeme 1 und 2 miteinander verbunden sind. Der Träger von System 2 und der Zahnkranz von System 1 sind ebenfalls miteinander verbunden. Die Omegas der verbundenen Teile sind gleich, wir können also sagen:
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
Es ist sehr wichtig, dass dies sorgfältig geprüft wird! Folgen Sie immer den Linien im Diagramm.
Diese Omegas tragen wir nun in die Berechnung von System 1 ein.
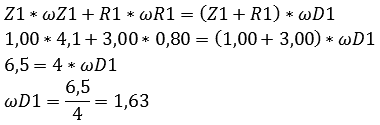
Wir können nun die Endübersetzung des Achsantriebs bestimmen, indem wir das Eingangs-Omega durch das Ausgangs-Omega dividieren. Wenn wir uns das Diagramm ansehen, sehen wir, dass das Omega des Sonnenradsystems 2 ankommend und das Omega des Trägersystems 1 abgehend ist.
Die Gesamtübersetzung des 2. Ganges beträgt somit 2,52.
Berechnen Sie das Übersetzungsverhältnis des dritten Gangs:
Bei der Berechnung des dritten Ganges muss berücksichtigt werden, dass alle drei Systeme zusammenarbeiten. Beginnen Sie immer mit dem Einzelantriebssystem. In diesem Fall ist es das dritte:

Das Sonnenrad von System 3 ist feststehend, nimmt also nicht teil. Geben Sie dann den Rest aller Werte ein:
Damit erhalten wir:
Dann gehen wir zu System 2. Sie geben die für System 3 bekannten Omegas in die Berechnung von System 2 ein:
Nun gehen wir zu System 1. Auch hier werden die bekannten Omegas eingetragen:
Letztendlich erhalten wir:
Das bedeutet, dass die Gesamtübersetzung des dritten Gangs 1,38 beträgt.
Berechnen Sie das Übersetzungsverhältnis des vierten Gangs:
Im vierten Gang ist die Kupplung K4 geschlossen. Das bedeutet, dass die Sonnenräder der Systeme 1, 2 und 3 gleichzeitig mit dem Motor gekoppelt sind. Das gesamte System ist nun blockiert. Alle Omegas sind gleich.
Wenn alle Omegas gleich sind, ist keine Übersetzung möglich. Die Motordrehzahl wird direkt auf die Räder übertragen. Wir nennen das preisdirekt.