Themen:
- Allgemeine Einparkhilfe
- Parkabstandskontrolle
- Rückfahrkamera
- Seitenansicht
- Rundumsicht
- Einparkhilfe
Allgemeine Einparkhilfe:
Zu den Parkassistenzsystemen gehören Systeme, die den Fahrer beim Ein- und Ausparken unterstützen. Das bekannteste Parkassistenzsystem ist die „Park Distance Control“, kurz PDC. Dieses System informiert den Fahrer des Fahrzeugs über den Abstand zum Fahrzeug im hinteren Bereich, bei umfangreichen Systemen auch im vorderen Bereich des Fahrzeugs. Auf dieser Seite werden moderne Technologien beschrieben, die entweder eine Erweiterung der Park Distance Control oder ein komplett eigenständiges Assistenzsystem darstellen.
Parkdistanzkontrolle:
Park Distance Control (PDC) ist ein Abstandswarnsystem, das Signale beim Ein- und Ausparken misst und Informationen über den Abstand zum Hindernis liefert. Im hinteren Stoßfänger und häufig auch im vorderen Stoßfänger befinden sich Ultraschallsensoren (siehe Bild). Diese senden Schallwellen mit einer sehr hohen Frequenz aus, die für das menschliche Ohr nicht wahrnehmbar sind. Diese Ultraschallfrequenzen werden von nahegelegenen Objekten reflektiert und vom Sensor empfangen. Der Sensor misst die Zeit zwischen dem Senden und Empfangen dieser Signale. Je näher das Objekt ist, desto schneller wird das Signal zurückgeworfen. Der Sensor erfasst es und gibt es an das PDC-Steuergerät (Computer) weiter.
Dieser Computer kann es in Form von Audiosignalen sowie mit Bild- und Tonsignalen an den Fahrer übertragen. Anschließend ist ein Piepton zu hören, der immer schneller wird, je näher das Objekt kommt. Bei einem Abstand von ca. 30 cm gibt es einen konstanten Piepton ab, der Sie als Fahrer darauf hinweist, dass Sie anhalten müssen.

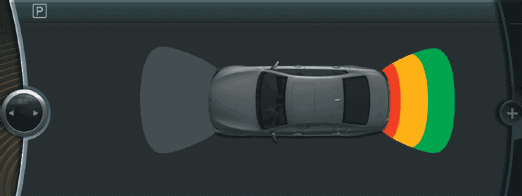
Moderne Bordcomputer sind häufig mit einer Option ausgestattet, bei der die Entfernung zum Objekt auf einem Bildschirm angezeigt wird. Die PDC-Sensoren sind gleich; Das Steuergerät berechnet die Daten der Sensoren und verarbeitet sie zu Informationen, die auf dem Bildschirm angezeigt werden können.
Das Bild unten zeigt das PDC-Steuergerät (ECU). Dieses graue Quadrat enthält den Mikrocontroller, den Verstärker und ein UND-Gatter. Der Mikrocontroller sendet eine Rechteckspannung mit einer Frequenz von ca. 40 kHz (schwarz). Zusätzlich wird periodisch eine Blockspannung mit niedriger Frequenz ausgegeben (rot/blau). Das UND-Gatter empfängt die beiden Blockspannungen. Wenn beide Spannungen hoch sind, ist die Ausgangsspannung (rechts vom UND-Gatter) hoch. Wenn eine der beiden Spannungen niedrig ist, wird auch der Ausgang niedrig. Die Ausgangsspannung wird an den Mikrocontroller und an den Sender im PDC-Sensor zurückgesendet. Der Sender sendet das Ultraschallsignal mit einer Geschwindigkeit von ca. 300 m/s aus. Befindet sich ein Objekt in der Nähe, wird der Ultraschallschall reflektiert und vom Empfänger registriert. Wir nennen dies „Triangulation“. Der Empfänger sendet das gebildete Blocksignal an die ECU. Das Blocksignal wird mit einem Verstärker verstärkt und anschließend vom Mikrocontroller verarbeitet.
Die Zeit zwischen dem Empfang des Ausgangssignals vom UND-Gatter und dem Verstärker ist ein Maß für die Entfernung zum Objekt. Je geringer der Abstand zwischen PDC-Sensor und Objekt ist, desto kürzer ist die Zeit. Der Mikrocontroller steuert den Summer oder kommuniziert über den CAN-Bus mit anderen Steuergeräten.
Der folgende Schaltplan (VAG) zeigt die Kommunikation zwischen den Steuergeräten, Eingängen zu Schaltern und Ausgängen unter anderem zum Summer.
Das PDC-Steuergerät (J446) erhält über den CAN-Bus die Fahrgeschwindigkeit und das Rückwärtssignal. Das PDC-Steuergerät sendet über den Anschluss T12/11 eine modulierte Blockspannung an den Kabelverbinder (X86 im hinteren Stoßfänger), der mit allen PDC-Sensoren (G203, G334, G335 und G206) verbunden ist. Jeder PDC-Sensor verfügt über eine eigene Signalleitung (über Pin 2) zur ECU. Darüber hinaus ist die Masse jedes Sensors mit einer Masseschweißung (352) verbunden.
Wenn ein oder mehrere Sensoren ein Objekt erkennen, aktiviert das Steuergerät den Summer (H15). Abhängig von der Entfernung zum Objekt gibt der Summer ein schnelleres oder langsameres intermittierendes Tonsignal ab.

Dank der Kommunikation mit der Diagnoseschnittstelle (J533) ist es möglich, folgende Diagnosefunktionen durchzuführen:
- Fehlerspeicher abfragen
- Codierung des Steuergeräts anpassen (z. B. nach Erweiterung des Systems mit PDC-Sensoren vorne oder nach Einbau einer Anhängerkupplung)
- Passen Sie die Lautstärke des Summers an
- Abfragen von Messwertblöcken unter anderem der Entfernung aller Sensoren zum Objekt, der berechneten Entfernung und der Stabilisierungszeit von Sender und Empfänger.
Rückfahrkamera:
Zusätzlich zur Parkdistanzkontrolle kann die Einparkhilfe auch mit einer Rückfahrkamera ausgestattet werden. Sobald der Fahrer den Rückwärtsgang einlegt oder einen Knopf im Innenraum drückt, wird die Kamera am Heck des Fahrzeugs aktiviert. Normalerweise wird das Bild auf dem Bildschirm des Radios oder Bordcomputers angezeigt.
Das Bild unten zeigt ein BMW-Display mit dem Bild am Heck des Fahrzeugs. Rechts vom Kamerabild ist ein Fahrzeug mit einem dreiteiligen Gitter an Front und Heck zu sehen; Hier wird der Abstand zu einem Objekt angezeigt, den die PDC-Sensoren registrieren.
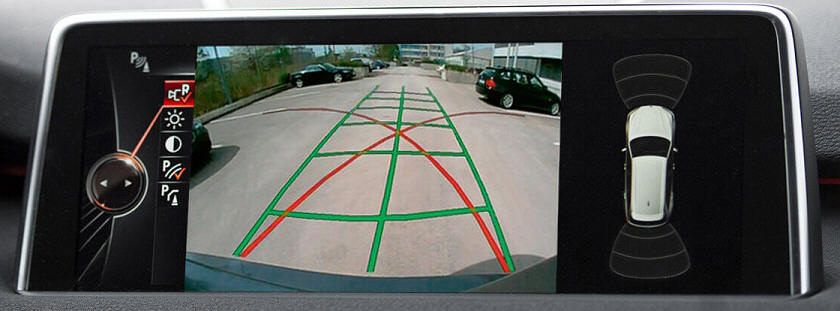
Im Bild der Rückfahrkamera sind rote und grüne Linien zu erkennen. Die roten Linien zeigen die mögliche Richtung an, in die das Fahrzeug gelenkt werden kann; Bei maximaler Lenkung folgen die Räder der roten Linie an der Außenseite der Kurve. Das grüne Gitter folgt der Richtung, in die der Lenker gedreht wird; In diesem Moment stehen die Vorderräder geradeaus. Wenn der Fahrer das Lenkrad dreht, zeigen die grünen Linien die tatsächlichen Fahrlinien an. Der Lenkwinkelsensor registriert die Position des Lenkrads.
Die Rückfahrkamera ist manchmal gut sichtbar und befindet sich häufig in der Nähe des Nummernschilds und/oder des Griffs zum Öffnen der Heckklappe. Manchmal entscheiden sich Hersteller dafür, die Kamera außer Sichtweite zu montieren. Das Bild unten zeigt die Rückfahrkamera eines VW Golf, wobei ein Elektromotor das VW-Emblem neigt, um die Kamera nach außen zu bewegen. Beim erneuten Vorwärtsfahren klappt das Emblem automatisch zurück. Die Kamera ist nicht nur außer Sichtweite platziert, das Objektiv verschmutzt auch weniger schnell.

Seitenansicht:
Wenn Sie rückwärts zwischen zwei Fahrzeugen oder großen Objekten wechseln, müssen Sie ein Stück vorwärts fahren, um nach links und rechts zu schauen. Mit einer Seitenansichtkamera (auch Eckansicht genannt) ist dies viel einfacher; Kameras links und rechts im vorderen Stoßfänger senden das Bild an den Bildschirm im Armaturenbrett. Das Bild zeigt das Bild der Eckkameras. Leider können Kameras nicht unsichtbar montiert werden. Autos, die mit einer Seitenkamera ausgestattet sind, haben eine (häufig) schwarze Linse in der Stoßstange. Das Bild unten zeigt die vordere Stoßstange eines BMW mit der linken Kamera.


Rundumsicht:
Zu den luxuriösesten Parkassistenzsystemen gehört zweifellos die „Surround View“, auch Top View, 3D oder Bird View genannt. Jede Marke gibt dem System ihren eigenen Namen und ihre eigene Charakteristik. Wir verwenden jetzt den Namen Rundumansicht.
Bei der Rundumsicht wird die Oberseite des Autos auf dem Bildschirm angezeigt. Es sieht so aus, als gäbe es eine Kamera, die das Dach des Autos und die Umgebung beobachtet. Das Auto ist eine Simulation und die Umgebung wird von mehreren (meist vier) zusammengesetzten Kameras erfasst.
Die folgenden drei Bilder (von BMW) zeigen das Bild, das der Fahrer sieht. Beim Parken ist die Trennung von Stellplatz und Gegenständen wie Pfosten etc. deutlich sichtbar. Beim Rückwärtsfahren können Sie an das Heck heranzoomen; Hier sind hauptsächlich Pflanzen zu sehen. Die herkömmlichen PDC-Sensoren erfassen den Abstand zu den Pflanzen. Der Computer markiert diesen Abstand mit einer roten Farbe.

Beim Vorwärtsparken kann das System auch die Umgebung und die Vorderseite anzeigen. PDC-Sensoren helfen jetzt auch dabei, den Abstand zum Zaun zu ermitteln.

Paralleles Parken entlang einer Bordsteinkante kann, wenn der Fahrer nicht vorsichtig ist, zu Schäden an Reifen und Felgen führen. Auch die Rundumsicht bietet jetzt eine Lösung; Dank der guten Übersicht über das Straßenbild können Sie direkt und nah am Straßenrand parken. Die neuesten Entwicklungen von BMW ermöglichen die Umkehrung des Kamerabildes und die Simulation des Fahrzeugs.

Die nächsten drei Bilder zeigen die Orte, an denen sich die Kameras häufig befinden.



Einparkhilfe:
Als Erweiterung der Einparkhilfe kann die sogenannte „Ausparkhilfe“ den Fahrer beim rückwärtigen Verlassen einer Parklücke mit eingeschränkter Sicht unterstützen. Dies kann in Situationen der Fall sein, in denen das Fahrzeug neben einer Wand oder zwischen Fahrzeugen geparkt ist.
Die Sensoren am Heck des Fahrzeugs erkennen den Verkehr, der hinter dem Fahrzeug vorbeifährt und möglicherweise eine Kollisionsgefahr darstellt. Hierzu zählen alle beweglichen Objekte, die sich dem Fahrzeug mit einer bestimmten Geschwindigkeit nähern. Wenn der Parkassistent ein sich näherndes Fahrzeug erkennt, erscheint eine Meldung auf dem Display des Infotainmentsystems. Dazu kommt meist noch ein akustisches Tonsignal. Wenn der Fahrer diese Signale ignoriert und rückwärts fährt, greift das System physisch ein, indem es die Bremsen betätigt, um das Fahrzeug abzubremsen.
