Bestimmen Sie den K-Faktor anhand der geometrischen Reihe
Bestimmen Sie den K-Faktor gemäß der korrigierten geometrischen Reihe (Jante-Reihe)
Übersetzungsverhältnisse ermitteln (Einführung)
Berechnen Sie die Untersetzung des 1. Gangs
Untersetzung 5. Gang berechnen (gemäß der geometrischen Reihe)
Berechnung anderer Reduktionen (gemäß der geometrischen Reihe)
Berechnen Sie Reduktionen gemäß der korrigierten geometrischen Reihe (Jante-Reihe).
Berechnen Sie die Fahrzeuggeschwindigkeit pro Reduzierung (geometrische Reihe)
Berechnen Sie die Fahrzeuggeschwindigkeit pro Reduzierung (korrigierte geometrische Reihe)
Einführung in die Übersetzungsverhältnisse: Das Übersetzungsverhältnis wird bestimmt durch:
Die Anzahl der Zähne der Zahnräder (z. B. des Getriebes)
Der Durchmesser der Riemenscheiben (z. B. der vom Multiriemen angetriebenen Komponenten)
Die Abbildung zeigt, dass Zahnrad A 20 Zähne und Zahnrad B 40 Zähne hat. Das Verhältnis beträgt 40/20 = 2:1. Das bedeutet, dass Zahnrad A (angetrieben) zwei Umdrehungen macht, während Zahnrad B eine Umdrehung macht. In der Praxis ist dies jedoch nie der Fall. Es ist immer ein Verhältnis gewährleistet, das nie genau 2,00:1 beträgt, da im letzteren Fall bei jeder Umdrehung die gleichen Zähne ineinandergreifen. Wenn Zahnrad B 39 Zähne (1,95:1) oder 41 Zähne (2,05:1) hätte, würden die Zahnräder von A und B bei jeder Umdrehung einen Zahn weiter ineinandergreifen, was zu einem 20-mal geringeren Verschleiß als bei der Übersetzung von 2:1 führen würde.
Ein hohes Übersetzungsverhältnis (bei dem das Antriebsrad klein und das Abtriebsrad groß ist) sorgt für eine hohe Höchstgeschwindigkeit und ein niedriges Übersetzungsverhältnis für mehr Zugkraft. Beim Getriebe eines Pkw (im Prinzip alle Kraftfahrzeuge) berücksichtigt die Konstruktion die Einsatzzwecke des Pkw. Ein Auto, das hauptsächlich schwere Lasten transportieren soll, benötigt in niedrigen Gängen mehr Durchzugskraft als ein Sportwagen, der eine hohe Höchstgeschwindigkeit erreichen muss. Die Übersetzung des höchsten Ganges muss so ausgelegt sein, dass bei maximaler Motorleistung die maximale Motordrehzahl erreicht werden kann. Es wäre schade, wenn die Geschwindigkeit schon nahe am Limit wäre und noch genug Power übrig wäre, um weiter zu beschleunigen. Neben dem höchsten Gang muss auch der niedrigste Gang sorgfältig gewählt werden; Das Auto muss auch bei schlechtesten Bedingungen problemlos im ersten Gang an einer Steigung von 40 % anfahren können. Darüber hinaus müssen die Übersetzungen der Zwischengänge, also 2, 3 und 4 (eventuell auch 5, wenn es sich um ein 6-Gang-Getriebe handelt) zwischen diesen ermittelt werden.
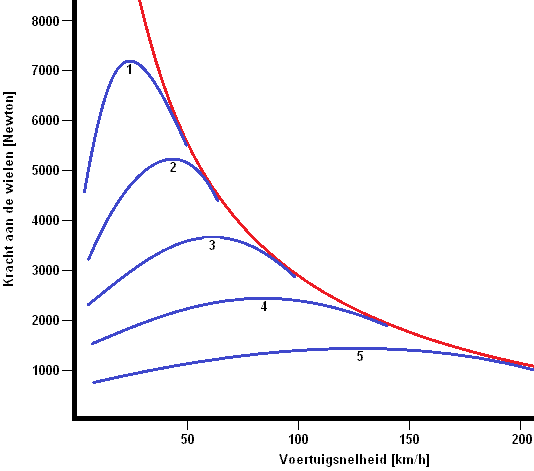
Kraft auf die Räder In der Grafik (im Bild) wird die Motorcharakteristik durch die blauen Linien und die Fahrzeugcharakteristik durch die rote Linie angezeigt. Hier ist deutlich zu erkennen, dass der 1. Gang eine hohe Kraft auf die Räder ausübt (ca. 7200 N, also 7,2 kN) und dass der höchste Gang (5.) eine Kraft von maximal 1500 N auf die Räder überträgt. Mit zunehmender Geschwindigkeit und Beschleunigung des Fahrzeugs nimmt die auf die Räder ausgeübte Kraft ab. Der Verlauf der blauen Linien ergibt sich aus den Übersetzungsverhältnissen und die abfallende rote Linie aus den Fahrwiderständen (Roll- und Luftwiderstand).
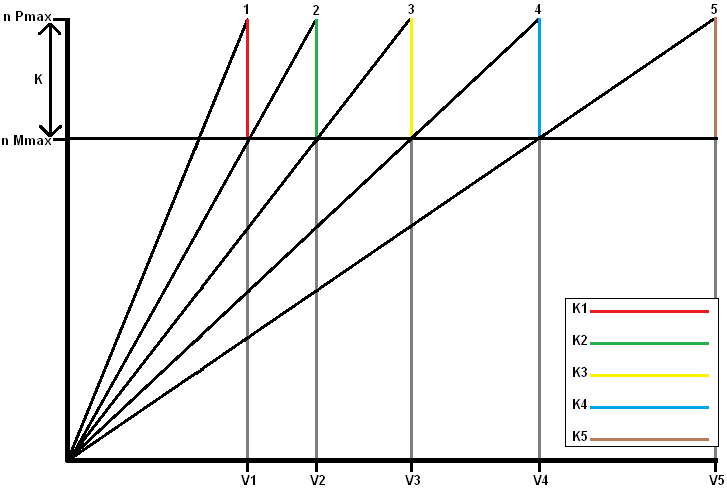
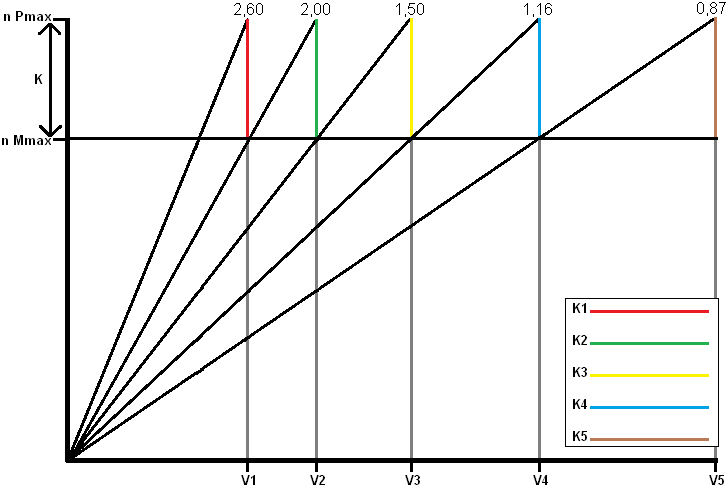
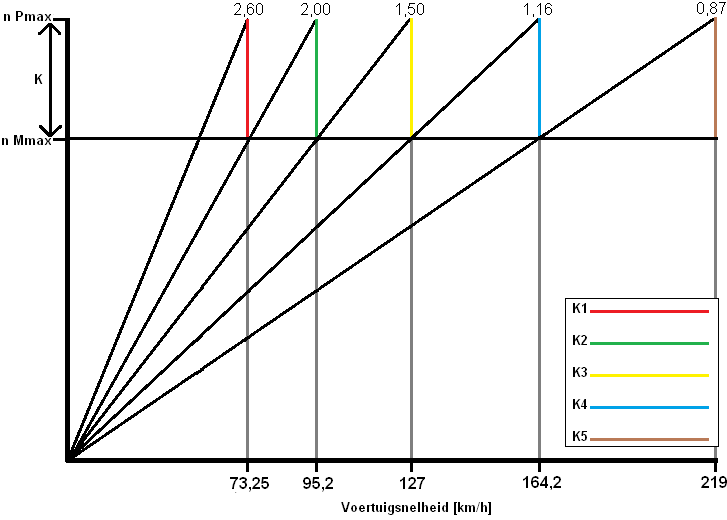
Bestimmen Sie den K-Faktor anhand der geometrischen Reihe: Der folgende Text bezieht sich auf das Sägezahndiagramm unten.
Wenn Sie im ersten Gang auf maximale Motordrehzahl beschleunigen, müssen Sie in den 2. Gang schalten. Nach dem Schalten und Auskuppeln ist die Motordrehzahl gesunken und die Fahrzeuggeschwindigkeit bleibt gleich. Beim Schalten vom 1. in den 2. Gang folgt die Motordrehzahl der roten Linie im Diagramm unten. Die Motordrehzahl sinkt von „n Pmax“ auf „n Mmax“. Die farbigen Linien umreißen den K-Faktor. Die Größe des K-Faktors bestimmt die Größe der farbigen Linien. Wenn „n Mmax“ und „n Pmax“ nahe beieinander liegen, ist der K-Faktor klein. Es gibt also kleinere Lücken zwischen den Übertragungen. Bei den anderen Gängen funktioniert es genauso. Beschleunigt man vom 2. Gang (bis V2) auf „n Pmax“, folgt man beim Schalten der grünen Linie bis „n Mmax“.
n Pmax: Die Motordrehzahl, bei der die maximale Leistung erreicht wird (z. B. 6000 U/min), wobei „n Pmax“ „Drehzahl bei maximaler Leistung“ ist.
n Mmax: Die Motordrehzahl, bei der das maximale Drehmoment erreicht wird (z. B. 4000 U/min) mit „n Mmax“ als „Drehzahl bei maximalem Drehmoment“
Die Verhältnisse zwischen den Geschwindigkeiten und den Gängen bleiben gleich. Alle farbigen Linien (K1 bis K5) bleiben daher gleich. Der K-Faktor wird durch die Motorcharakteristik bestimmt. Der K-Faktor liegt zwischen den Motordrehzahlen des maximalen Drehmoments und der maximalen Leistung des Motors. Die Übersetzungsverhältnisse des Getriebes werden daher auf Basis dieser Motorkennlinie berechnet. Der K-Faktor kann für die geometrische Reihe wie folgt ermittelt werden: K = n Pmax / n Mmax K = 6000 / 4000 K = 1,5
Der K-Faktor von 1,5 bestimmt die Untersetzungen (Übersetzungen) aller Gänge. Diese sind alle aufeinander abgestimmt. Wegen der großen Lücken in den höheren Gängen wird die geometrische Reihe bei Pkw nicht angewendet. Die Getriebe von Pkw sind nach der korrigierten geometrischen Reihe (Jante-Reihe) ausgelegt.
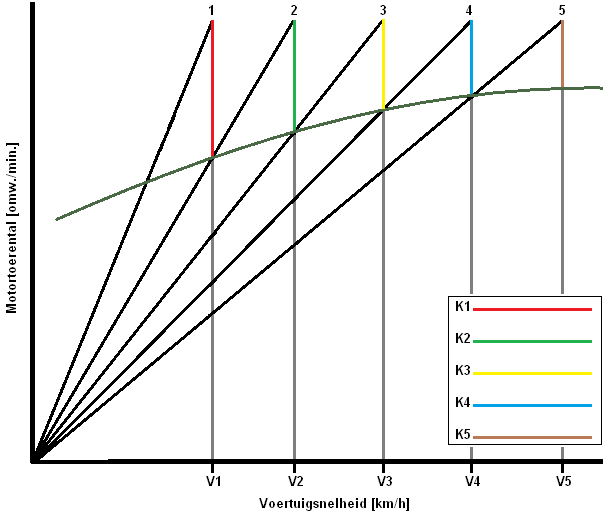
Bestimmen Sie den K-Faktor anhand der korrigierten geometrischen Reihe (Jante-Reihe): Bei Pkw sind die Abstände zwischen den niedrigen Gängen oft groß und werden mit den höheren Gängen kleiner. Kleine Lücken zwischen den hohen Gängen führen zu geringen Beschleunigungsverlusten. Die Übersetzungen in den höheren Gängen werden immer kleiner und ermöglichen so eine maximale Nutzung der Motorleistung. Das merkt man auch; Zwischen dem Schalten vom 1. in den 2. Gang sinkt die Motordrehzahl stärker als zwischen dem Schalten vom 3. in den 4. Gang. Dies ist im Sägezahndiagramm unten sichtbar; Die rote Linie ist größer als die gelbe Linie:
Die arithmetische Reihe wird auch „Jante-Reihe“ genannt. Es handelt sich um eine korrigierte geometrische Reihe. Der K-Faktor ist in allen Gängen unterschiedlich. Dies hat große Vorteile gegenüber der oben genannten geometrischen Reihe mit dem festen K-Wert. Da die Übersetzungen in den höheren Gängen kleiner werden, wird die maximale Motorleistung genutzt. Die Kraft auf die Räder ist nun größer als in der geometrischen Reihe. Der K-Faktor ist nun für jeden Gang unterschiedlich (alle farbigen Linien haben eine unterschiedliche Länge) und muss daher nun alle rechnerisch ermittelt werden. Mit dem K-Faktor lassen sich die Übersetzungsverhältnisse der Gänge ermitteln. Ohne Kenntnis des K-Faktors lässt sich zwar die Untersetzung des niedrigsten bzw. höchsten Ganges ermitteln, die restlichen Beschleunigungen müssen dann aber mit dem K-Faktor berechnet werden. Erst dann kann das Sägezahndiagramm gezeichnet werden.
Übersetzungsverhältnisse ermitteln (Einführung): Der Getriebehersteller muss einiges berücksichtigen. Die Übersetzungen im Getriebe müssen sorgfältig zusammengebaut werden. Wichtig sind beispielsweise Faktoren wie die Drehzahlen, bei denen der Motor das meiste Drehmoment und die meiste Leistung hat, der dynamische Reifenradius, die Untersetzung des Differenzials und die Effizienz des gesamten Antriebsstrangs. Dies ist unten aufgeführt:
Die Geschwindigkeiten, bei denen der Motor das meiste Drehmoment und die meiste Leistung hat: Dies sind die Geschwindigkeiten „n Pmax“ und „n Mmax“, die in der Abbildung der geometrischen Reihe oben dargestellt sind.
Der dynamische Reifenradius: Dies ist der Abstand zwischen der Mitte der Nabe und der Straßenoberfläche. Je kleiner das Rad ist, desto höher ist die Geschwindigkeit des Rades bei gleicher Fahrzeuggeschwindigkeit. Der dynamische Reifenradius kann wie folgt berechnet werden (sofern er bereits bekannt ist): Zur Berechnung muss die Reifengröße bekannt sein. Als Beispiel nehmen wir die Reifengröße 205/55R16. Das bedeutet, dass der Reifen (205 x 0,55) = 112,75 mm = 11,28 cm hoch ist. Da es sich um 16 Zoll handelt, muss dies in Zentimeter umgerechnet werden: 16 x 2,54 (Zoll) = 40,64 cm. Es handelt sich um den Abstand zwischen Fahrbahnoberfläche und Nabe, daher muss die Gesamthöhe von 40,64 cm durch 2 geteilt werden: 40,64 / 2 = 20,32 cm. Der dynamische Reifenradius (Rdyn) beträgt jetzt: 11,28 + 20,32 = 31,60 cm.
Die Reduzierung des Differentials: Das Differenzial hat immer ein festes Übersetzungsverhältnis. Das Getriebe muss darauf abgestimmt sein. Nutzfahrzeuge können bis zu 5 Differentiale im Antrieb haben.
Der Wirkungsgrad des gesamten Antriebsstrangs: Unter anderem aufgrund von Reibungsverlusten entsteht immer ein gewisser prozentualer Verlust. Dies hängt auch von der Dicke des Öls (und der Temperatur) ab. Normalerweise liegt die Rendite bei etwa 85 bis 90 %.
Jetzt ermitteln wir die Übersetzungsverhältnisse (Untersetzungen) eines fiktiven Motors und Getriebes.
Folgende Spezifikationen sind bekannt:
Fahrzeugmasse: 1500 kg
Fallbeschleunigung (G): 9,81 m/s2
Getriebetyp: Schaltgetriebe mit 5 Gängen und Rückwärtsgang
Dynamischer Reifenradius: 0,32 m (= 31,60 cm aus der vorherigen Berechnung)
Untersetzung des Differenzials: 3,8:1
Antriebswirkungsgrad: 90 %
Maximale Fahrzeuggeschwindigkeit: 220 km/h (220 / 3,6 = 61,1 m/s)
Maximale Steigung: 20 %
Rollwiderstandskoeffizient (μ): 0,020
n Pmax: 100 kW bei 6500 U/min
n Mmax: 180 Nm bei 4500 U/min
Zunächst muss ermittelt werden, wie viel Drehmoment die Räder auf die Fahrbahn übertragen können. Dies hängt vom Zustand des Fahrzeugs ab, denn fährt es auf einer Asphaltstraße mit niedrigem Rollwiderstandskoeffizienten? Dieser lässt sich zusammen mit dem Rollwiderstand und dem dynamischen Reifenradius berechnen. Die Formel für den Rollwiderstand lautet wie folgt: Frol = μ xmxgx cos α (Eine Erklärung finden Sie auf der Seite Fahrwiderstände) Frol = 0,020 x 1500 x 9,81 x cos 18 = 279,9 N
Da es eine Steigung gibt, muss auch die F-Steigung berechnet werden: F-Steigung = mxgx sin α F-Steigung = 1500 x 9,81 x sin 18 = 4547,2 N
Da der Luftwiderstand vernachlässigt werden kann, ergibt sich für den gesamten Fahrwiderstand folgender Wert: Frij = Frol + Fslope Frij = 279,9 + 4547,2 = 4827,1N
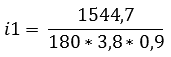
Um das maximale Drehmoment zu berechnen, das die Räder auf die Fahrbahn übertragen können, muss der Frij mit dem dynamischen Reifenradius multipliziert werden Mwiel = Frij x Rdyn M-Rad = 4827,1 x 0,32 MRad = 1544,7 Nm
K-Faktor: Jetzt berechnen wir den K-Faktor: K = n Pmax / n Mmax K = 6000 / 4500 K = 1,33
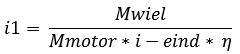
Untersetzung 1. Gang berechnen: Die Formel zur Berechnung des ersten Gangs lautet wie folgt:
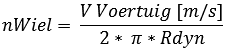
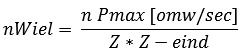
Berechnen Sie die Untersetzung des 5. Gangs (gemäß der geometrischen Reihe): Auf ähnliche Weise lässt sich auch die Untersetzung des 5. Ganges ermitteln. Der 5. Gang muss anhand der maximalen Motordrehzahl ermittelt werden, denn es wäre ärgerlich, wenn der Motor noch genug Leistung hätte, um weiter zu beschleunigen, während die maximale Motordrehzahl (und damit die Höchstgeschwindigkeit des Autos) erreicht ist. Wichtig ist auch die Geschwindigkeit des Rades (nWheel) bei maximaler Fahrzeuggeschwindigkeit. Dies muss zunächst berechnet werden:
Da nun die Geschwindigkeit des Rades bei der maximalen Fahrzeuggeschwindigkeit von 220 km/h (61,1 Meter pro Sekunde) bekannt ist, kann die Untersetzung des 5. Gangs berechnet werden.
Berechnung anderer Reduktionen (nach der geometrischen Reihe): Den Berechnungen zufolge beträgt die Untersetzung des 5. Gangs 0,87 und der K-Faktor = 1,33. Mit diesen Daten (entsprechend der geometrischen Reihe) können die Untersetzungen des 2., 3. und 4. Ganges berechnet werden.
i5 = (wurde bereits zuvor berechnet) i4 = K x i5 i3 = K x i4 i2 = K x i3 i1 = K x i2
Die Reduktion i1 ist hier bereits bekannt, sodass sich bei korrekter Berechnung des Restes die gleiche Zahl (nämlich 2,51) ergeben sollte. Eine kleine Abweichung ist normal, da zwischenzeitlich viele Rundungen vorgenommen wurden. Nun kann die Zeile aller Ermäßigungen ausgefüllt werden. Die Berechnungen müssen von oben nach unten erfolgen. Die Antwort von i5 wird für i4 verwendet, und von i4 für i3 usw.
i5 = 0,87 i4 = 1,33 x 0,87 = 1,16 i3 = 1,33 x 1,16 = 1,50 i2 = 1,33 x 1,50 = 2,00 i1 = 1,33 x 2,00 = 2,60
Die geometrische Reihentabelle kann nun vervollständigt werden.
Berechnung von Reduktionen gemäß der korrigierten geometrischen Reihe (Jante-Reihe): Weiter oben auf der Seite wurde der Unterschied zwischen der geometrischen Reihe und der „korrigierten“ geometrischen Reihe erklärt. Die korrigierte geometrische Reihe, auch „Jante-Reihe“ genannt, hat den Vorteil, dass die K-Faktoren bei den höheren Reduktionen näher beieinander liegen. Der K-Faktor für die geometrische Reihe war konstant (dieser war n P max dividiert durch n M max und betrug 1,33). Dies ergab auch einen konstanten Wert im Diagramm. Bei der korrigierten geometrischen Reihe gibt es eine Linie im Diagramm, die anzeigt, dass der K-Wert nicht konstant ist. Der K-Faktor nimmt mit jeder Beschleunigung ab. Die korrigierte geometrische Reihe hat einen konstanten Wert. Wir kennzeichnen dies mit einem m. Der Wert von m = 1,1.
Die allgemeine Formel des K-Werts der korrigierten geometrischen Reihe lautet wie folgt:
Erklärung der Formel: z-1 = die Anzahl der Gänge minus eins i1 = erste Ganguntersetzung m zur sechsten Potenz = konstant zur 6 iz = die Gesamtzahl der Gänge
Ausgefüllt ergibt dies die vierte Wurzel von 2,6 / (1,1^6 x 0,87) (Geben Sie die Quadratwurzel wie folgt in den Taschenrechner ein: Geben Sie zuerst 4 ein, dann SHIFT, gefolgt vom Wurzelzeichen mit einem x darüber. Schreiben Sie dann die Multiplikation unter die Trennlinie zwischen Klammern.)
Die Antwort lautet: 1,14
Der K-Wert der korrigierten geometrischen Reihe beträgt daher 1,14. Wir berechnen das weiter:
i5 = (zuvor berechnet) i4 = K x i5 i3 = K2 xmx i5 i2 = K3 x m3 x i5 i1 = K4 x m6 x i5
i5 ist bekannt; dieser beträgt nämlich 0,87. Der K-Wert beträgt 1,14 und m beträgt 1,1. Mit diesen Daten können wir die Tabelle ausfüllen:
i5 = 0,87 i4 = 1,14 x 0,87 i3 = 1,142 x 1,1 x i5 i2 = 1,143 x 1,13 x i5 i1 = 1,144 x 1,16 x i5
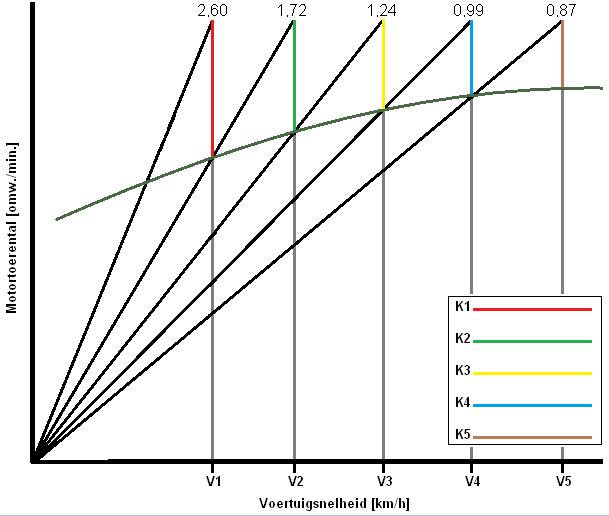
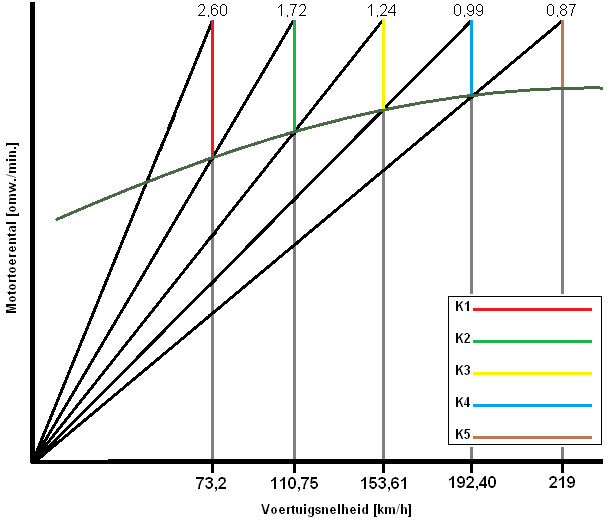
i5 = 0,87 i4 = 0,99 i3 = 1,24 i2 = 1,72 i1 = 2,60
Die Tabelle der korrigierten geometrischen Reihe kann nun vervollständigt werden:
Berechnen Sie die Fahrzeuggeschwindigkeit pro Reduzierung (geometrische Reihe): Für jede Reduzierung kann die Fahrzeuggeschwindigkeit ermittelt werden. Dies ist die maximale Geschwindigkeit, die das Fahrzeug in diesem Gang bei der Höchstgeschwindigkeit von 6000 Umdrehungen pro Minute erreichen kann. Die Berechnung ist wie folgt:
VFahrzeug 1. Untersetzung = 2 x π x nRad x Rdyn (nRad wurde gerade für den ersten Gang berechnet und Rdyn war bereits bekannt; dieser beträgt 0,32m. Die Formel kann dann eingegeben werden:
VFahrzeug 1. Reduzierung = 2 x π x 10,12 x 0,32 VFahrzeug 1. Reduzierung = 20,35 m/sx 3,6 = 73,25 km/h
Die anderen Beschleunigungen können einfach berechnet werden, indem Z = 2,60 in der ersten Formel auf die Reduzierung der gewünschten Beschleunigung geändert wird und diese dann als nWheel in die zweite Formel eingegeben wird. Die anderen Gänge haben folgendes Ergebnis:
2. Gang: 95,2 km/h 3. Gang: 127 km/h 4. Gang: 164,2 km/h 5. Gang: 219 km/h (das ist die Höchstgeschwindigkeit des Autos)
Diese Geschwindigkeiten können in die Tabelle der geometrischen Reihe eingetragen werden.
Berechnen Sie die Fahrzeuggeschwindigkeit pro Reduzierung (korrigierte geometrische Reihe): Die Berechnung ist genau gleich und wird daher nicht mehr vermerkt.
1. Gang: 73,2 km/h 2. Gang: 110,75 km/h 3. Gang: 153,61 km/h 4. Gang: 192,40 km/h 5. Gang: 219 km/h
Wie nun deutlich zu erkennen ist, sind die Höchstgeschwindigkeiten des Wagens für die geometrische und die korrigierte geometrische Reihe gleich. In der geometrischen Reihe (der ersten) sind die Abstände zwischen den höheren Gängen sehr groß und in der korrigierten geometrischen Reihe sind die Abstände zwischen allen Gängen nahezu gleich. Letzteres kommt in heutigen Fahrzeugen zum Einsatz.