Themen:
- Einführung
- AC-Elektromotor (synchron, mit Permanentmagneten)
- AC-Steuerung des Synchronmotors
- Wechselstrom-Elektromotor (Asynchron-Käfigläufermotor)
- Wirkungsgradkennfeld des Synchron- und Asynchron-Elektromotors
Einführung:
Für den Antrieb eines Hybrid- oder vollelektrischen Fahrzeugs wird ein Elektromotor verwendet. Der Elektromotor wandelt elektrische Energie (aus der Batterie oder dem Range Extender) in Bewegung um, um die Räder anzutreiben. Darüber hinaus kann der Elektromotor beim Bremsen des Motors auch Bewegungsenergie in elektrische Energie umwandeln: regeneratives Bremsen. In diesem Fall fungiert der Elektromotor als Dynamo. Aufgrund dieser beiden Funktionen nennen wir den Elektromotor auch „elektrische Maschine“.
Für den Einbau des Elektromotors in ein Hybridfahrzeug gibt es folgende Möglichkeiten:
- Beim Verbrennungsmotor erfolgt die Kraftübertragung über einen Keilriemen oder direkt über die Kurbelwelle;
- Zwischen Motor und Getriebe: Die Eingangswelle des Getriebes wird vom Elektromotor angetrieben;
- Im Getriebe integriert;
- Auf dem Differential;
- An den Radnaben (Nabenmotor).
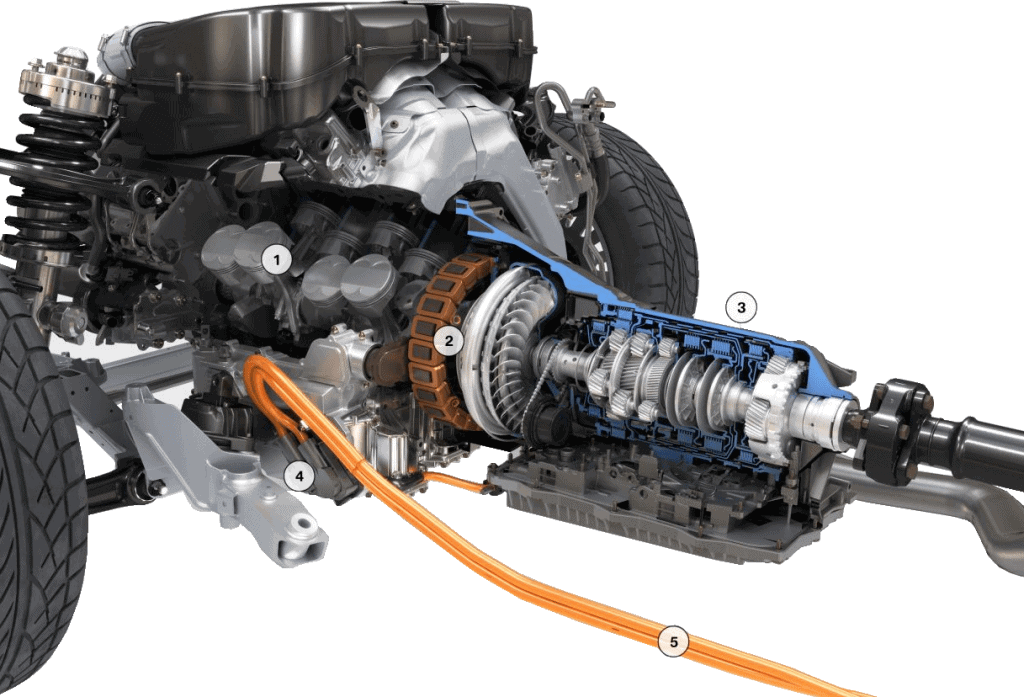
Der Elektromotor eines vollelektrischen Autos ist häufig an der Hinterachse montiert. Das Bild unten zeigt den Elektromotor mit Wechselrichter in einem zylindrischen Gehäuse und Achsantrieb eines Tesla.

Wechselstrom-Elektromotor (synchron, mit Permanentmagneten):
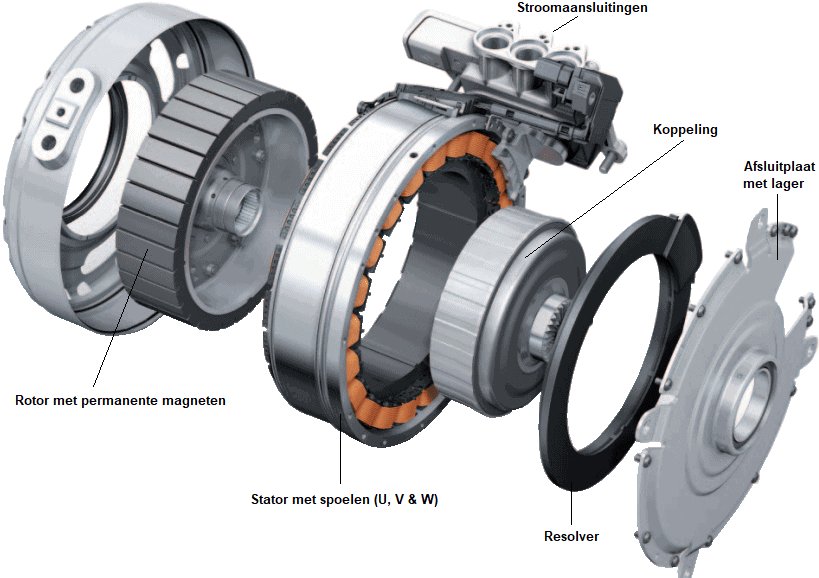
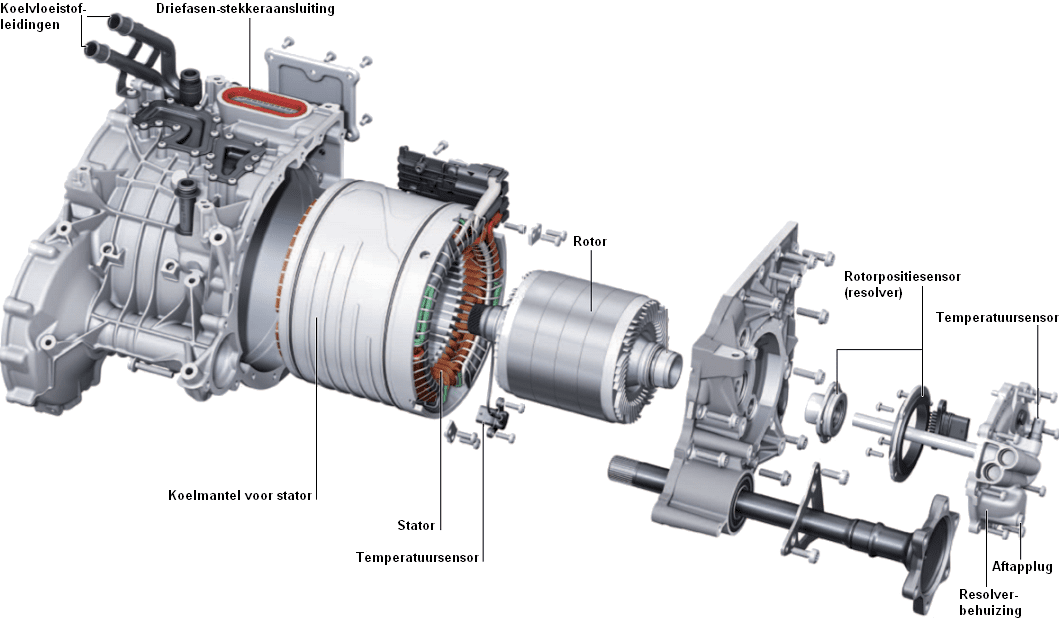
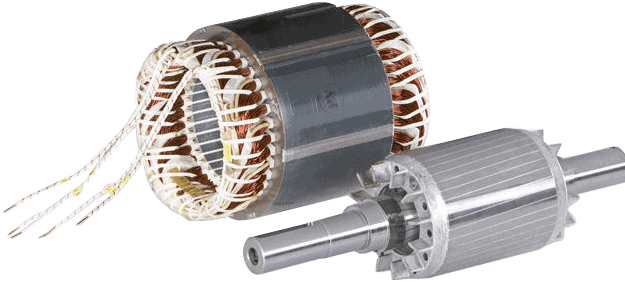
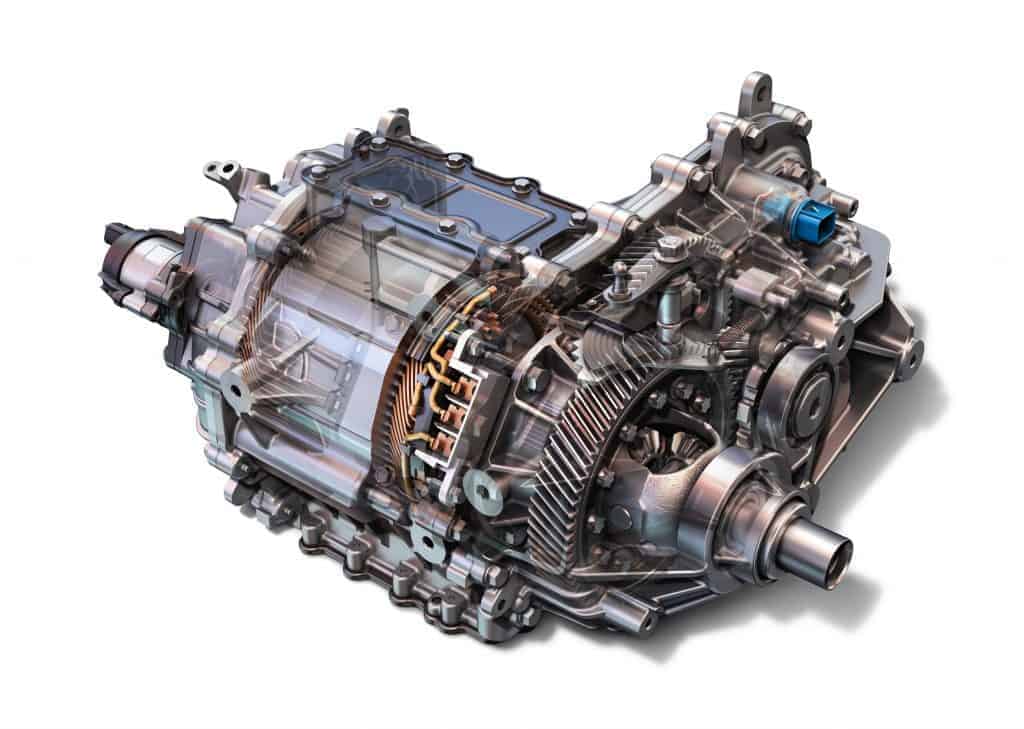
Das folgende Bild zeigt die Teile eines Audi (Synchron-)Elektromotors. Dieser Typ kommt in den Hybridvarianten des A6 und A8 zum Einsatz. Wir werden die Komponenten kurz auflisten. Diese Komponenten werden in den folgenden Abschnitten ausführlich beschrieben.
Durch eine Änderung des Magnetfeldes im Stator beginnt sich der Rotor mit Permanentmagneten zu drehen. Der Rotor ist mit der Kupplung verbunden, die in unterschiedlichen Betriebszuständen den Verbrennungsmotor und den Elektromotor (in Verbindung mit einer Kupplung (nicht dargestellt)) koppeln oder trennen kann. Die Position des Rotors wird durch die bestimmt Resolver gemessen: Diese Daten sind für die IGBT-Treiber wichtig, um die Statorspulen zum richtigen Zeitpunkt anzusteuern.
Der Elektromotor mit Permanentmagneten kann sowohl mit DC (Gleichspannung) als auch mit AC (Wechselspannung) gesteuert werden.
Der Synchronmotor ist einer der am häufigsten verwendeten Elektromotoren in Hybrid- oder vollelektrischen Fahrzeugen. Diese Art von Elektromotor besteht aus einem Stator mit Wicklungen und einem Rotor mit mehreren Permanentmagneten. Der Rotor dreht sich mit der gleichen Geschwindigkeit wie das Magnetfeld des Stators. Der Synchronmotor kann wie folgt gesteuert werden:
- AC: gesteuert durch ein Sinussignal (Wechselstrom).
- DC: Ansteuerung mit Rechteck- oder Trapezsignal (Gleichstrom)
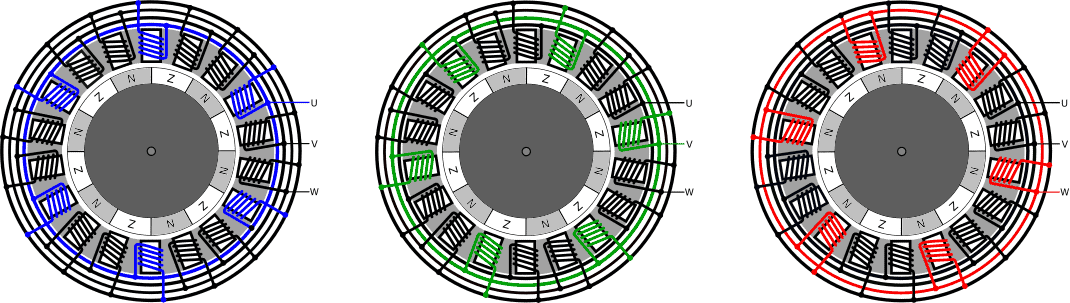
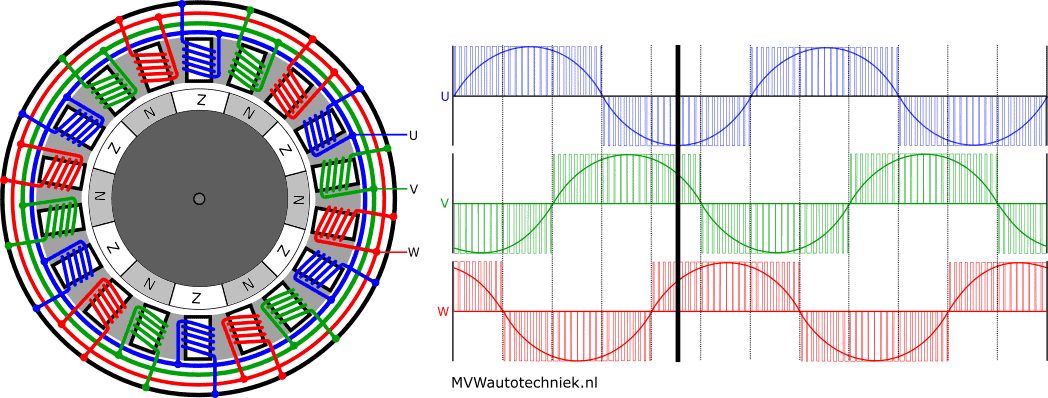
Der Stator des Synchronmotors besteht aus drei Statorspulengruppen: U, V und W. Jede Gruppe enthält drei Sätze von sechs parallel geschalteten Spulen, die über den gesamten Umfang des Stators verteilt sind. Jede dritte Spule gehört zur gleichen Serie.
- U-Spulen: blau
- V-Spulen: grün
- W-Spulen: rot
Der Rotor enthält mehrere Permanentmagnete. Durch abwechselnde Bestromung der Spulen im Stator entsteht ein rotierendes Magnetfeld. Der Rotor folgt dem Drehfeld und dreht sich daher.
AC-Ansteuerung des Synchronmotors:
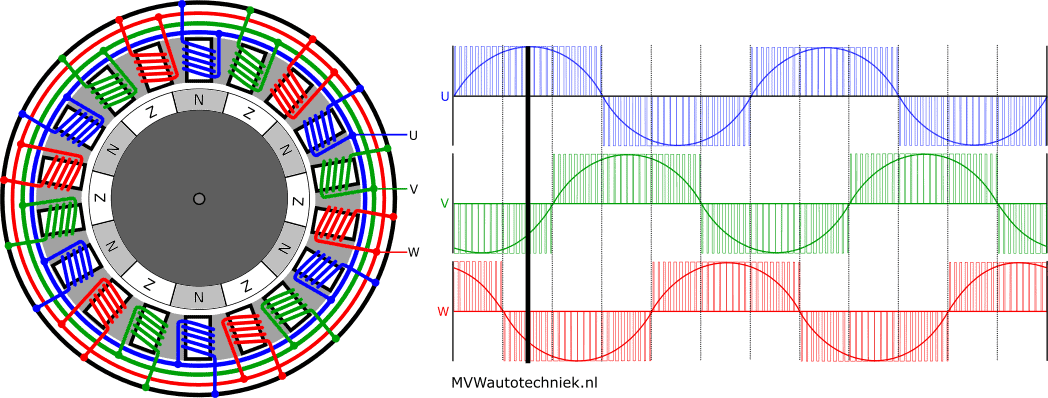
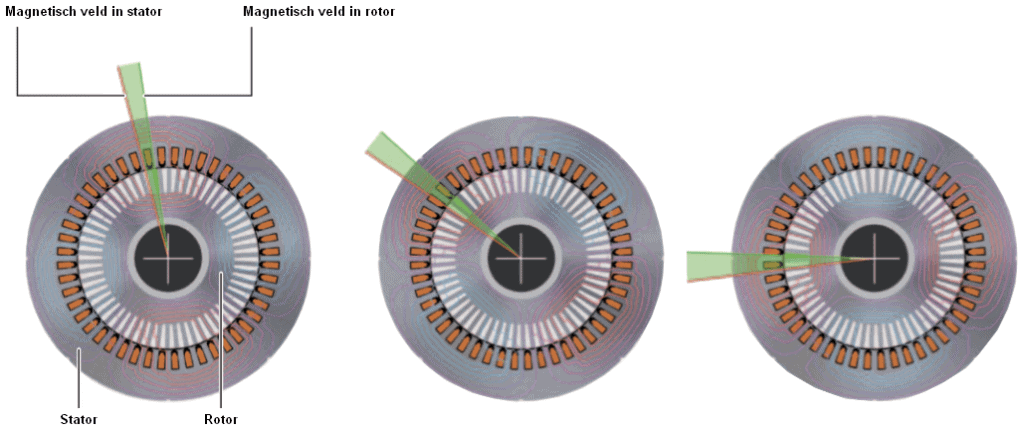
Die AC-Steuerung erfolgt mittels frequenzgesteuerter Steuerung oder Sinuskommutierung. Die Statorspulen werden mit einer dreiphasigen Sinuswellen-Wechselspannung versorgt, um den Rotor zu drehen.
Das Bild unten zeigt die Rotorposition bei maximal erregter U-Spule. Durch das Magnetfeld haben sich die Nordpole direkt gegenüber den unter Spannung stehenden U-Spulen positioniert. Der Cursor in der Grafik neben dem Elektromotor zeigt die aktuelle Steuerung der Spulen an.
Zur Information: Der Rotor in der Erklärung dreht sich bei der Ansteuerung der Statorspulen im Uhrzeigersinn.
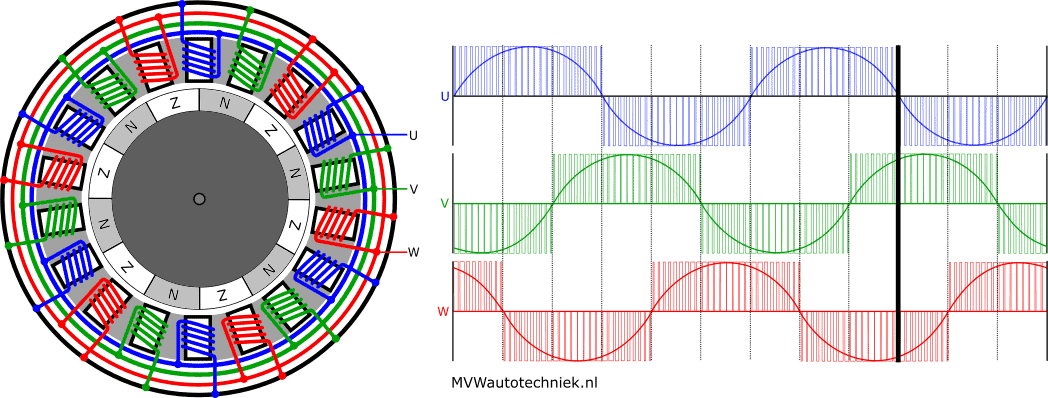
Im folgenden Bild ist die Sinuswelle, also der Wechselstrom durch die U-Spule, maximal negativ. Bei dieser Steuerung liegen die Südpole des Rotors den bestromten (U) Statorspulen direkt gegenüber.
Zwischen Nord- und Südpol des Rotors besteht tatsächlich ein kleiner Luftspalt. Beim Wechsel vom Süd- zum Nordpol ändert sich die Stromrichtung in der U-Spule. Weiter:
- Der Strom durch die V-Spule (grün) ist fast maximal positiv; der Nordpol liegt ebenfalls fast gegenüber der Spule.
- Der Strom durch die W-Spule war maximal negativ und nimmt zu. Der Südpol hat sich an der Spule vorbei gedreht.
Um einen Eindruck davon zu vermitteln, wie der Strom fließt, zeigt die folgende Animation die Rotordrehung aufgrund des Wechselstroms.
Wechselstrom-Elektromotor (Asynchron-Käfigläufermotor):
Der Käfigläufer- oder Kurzschlussanker-Elektromotor ist ein Asynchronmotor. Der Unterschied zwischen dem Synchronmotor mit Permanentmagneten und dem Asynchronmotor liegt im Rotor: Dabei handelt es sich um eine Weicheisentrommel mit Leitern in Längsrichtung. Der Rotor läuft asynchron zum Stator, das heißt es besteht ein Drehzahlunterschied zwischen dem Rotor und der magnetischen Drehzahl des Stators. Der Stator ist genau derselbe.
Der Rotor des Asynchron-Elektromotors besteht aus kurzgeschlossenen Spulen; die U-, V- und W-Spulen sind einseitig miteinander verbunden. Befindet sich der Rotor im Statordrehfeld, entsteht in den Rotorspulen eine Induktionsspannung. Da die Rotorspulen untereinander kurzgeschlossen sind, fließt ein Strom durch sie. Dieser Strom bewirkt, dass der Rotor ein Magnetfeld erzeugt und so ein Drehmoment erzeugt. Da der Betrieb des Asynchron-Elektromotors auf dem Induktionsgesetz beruht, nennen wir ihn auch Induktionsmotor.
Das abgegebene Drehmoment beeinflusst den Schlupf zwischen dem rotierenden Magnetfeld im Stator und der Drehzahl des Rotors.
Der Asynchronmotor hat gegenüber dem Synchronmotor eine Reihe von Vor- und Nachteilen.
Vorteile:
- relativ einfacher, robuster und kostengünstiger Rotor;
- hohes Drehmoment bei niedriger Drehzahl.
Nachteile:
- geringere Leistungsdichte (pro Masse) und Effizienz (Wirkungsgrad). Durch die Ströme in den kurzgeschlossenen Rotorspulen entstehen zusätzliche Rotorverluste;
- Die Geschwindigkeit kann nicht genau gesteuert werden, da sie von der Last abhängt. An sich muss das kein Nachteil sein: Mit einer guten Steuerung kann auch die Drehzahl des Asynchronmotors angepasst werden;
- hoher Anlaufstrom.
Die Rotorlage und Drehzahl des Asynchronmotors werden durch a gemessen Rotorpositionssensor. Hall-Sensoren liefern häufig mindestens vier Impulse pro Rotorumdrehung, um die Rotorposition und -geschwindigkeit zu übertragen. Wir bezeichnen diese Art von Rotorlagesensoren nicht als Resolver, wie es beim Synchronmotor der Fall ist.
Im Gegensatz zum Synchronmotor ist der Rotorlagesensor nicht notwendig, um die Rotorlage im Stillstand zu kennen. Bei der Rotation ist die Rotorlage wichtig: Es muss darauf geachtet werden, dass der Schlupf zwischen magnetischem Drehfeld und Rotor nicht zu groß wird. Wenn sich das Drehfeld zu schnell bewegt, kann es passieren, dass sich der Rotor plötzlich in die andere Richtung drehen möchte. Die auftretenden Kräfte können für die mechanischen und elektrischen Komponenten verheerende Folgen haben.
Einige Hersteller entscheiden sich auch für den Einsatz eines Asynchronmotors Resolver bewirbt sich. Der Grund ist mir unbekannt. Auf jeden Fall ist der Resolver sowohl im Stand als auch im Betrieb äußerst genau, was der präzisen Steuerung zugute kommen kann.
Wirkungsgradkennfeld des Synchron- und Asynchron-Elektromotors:
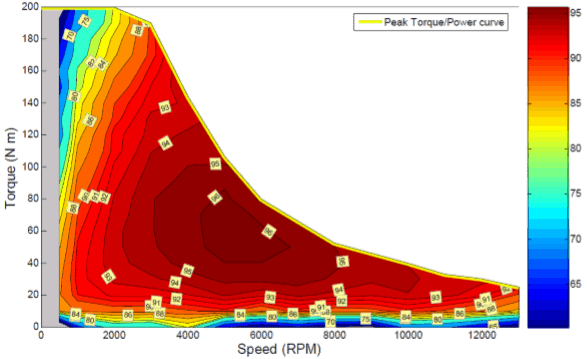
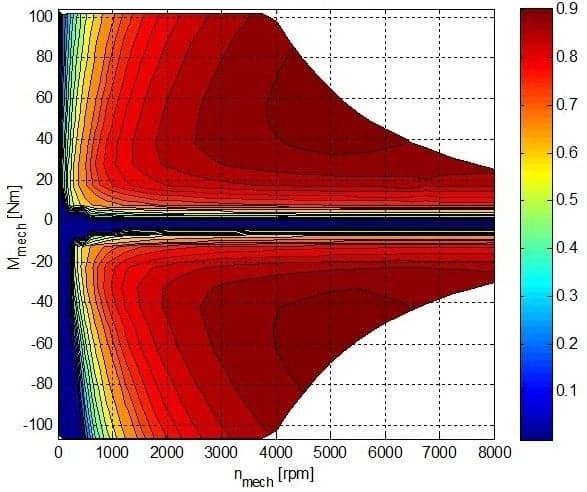
Die folgenden Bilder zeigen den Wirkungsgrad des Synchron-Elektromotors (links) und des Asynchron-Elektromotors (rechts).
- Der Synchron-Elektromotor ist sehr effizient. Der Wirkungsgrad liegt großflächig über 90 %, mit Spitzenwerten von bis zu 96 %. Ab 2000 U/min kommt es zu einer Feldschwächung, wodurch das maximale Drehmoment abnimmt.
- Der Asynchronmotor hat bei niedrigeren Drehzahlen einen deutlich geringeren Wirkungsgrad als der Synchronmotor.
Verwandte Seiten: