Themen:
- Einführung
- Funktionsprinzip von Elektromotoren
- Gleichstrom-Elektromotor mit Kohlebürsten
- Gleichstrom-Elektromotor ohne Kohlebürsten
Einführung:
An immer mehr Stellen im Auto finden wir Elektromotoren. In einem Elektromotor wird elektrischer Strom in Bewegung und Wärme umgewandelt. Einen Elektromotor finden wir in der Spiegel- und Sitzverstellung, aber auch als Scheibenwischermotor am Scheibenwischermechanismus oder als Anlasser. Diese Elektromotoren arbeiten mit einer Spannung von 12 bis 14 Volt. Auf dieser Seite beschränken wir uns auf die Elektromotoren im Innen- und Außenbereich.
Auch in Hybrid- und vollelektrischen Fahrzeugen sorgen Elektromotoren für den (teil-)elektrischen Antrieb. Diese Art von Elektromotor wird auf der Seite besprochen: HV-Elektromotoren.
Wir können die Gleichstrommotoren einteilen in:
- Elektromotor mit Kohlebürsten (elektromagnetisches Feld und Anker)
- Reihen-Elektromotoren;
- Parallele Elektromotoren;
- Bürstenlose Elektromotoren.
Funktionsprinzip von Elektromotoren:
Bei einem Elektromotor wird ein elektrischer Strom in eine Drehbewegung umgewandelt. Die Bewegung wird dadurch verursacht, dass sich zwei Magnetpole gegenseitig anziehen oder abstoßen:
- Ein Nordpol und ein Südpol ziehen sich gegenseitig an;
- Zwei Nordpole stoßen sich gegenseitig ab;
- Zwei Südpole stoßen sich gegenseitig ab.
Ein Magnet hat einen Nord- und einen Südpol mit entgegengesetzter Ladung. Wenn dieser Magnet in zwei Hälften zerbrochen wird, hat man nicht plötzlich zwei separate Pole, sondern zwei neue Magnete, beide mit einem Nord- und einem Südpol.
Am Gehäuse sind mehrere Magnetpole (Nord und Süd) befestigt. Zwischen Nord- und Südpol herrscht ein Magnetfeld. Die Abtriebswelle (der Anker) dreht sich aufgrund von Änderungen im Magnetfeld.
Bei einem Elektromotor werden zwei gleichnamige Pole ständig einander gegenübergestellt, meist durch Permanentmagnete oder Elektromagnete. Da sich die gleichnamigen Pole gegenseitig abstoßen, entsteht eine Bewegung.
Gleichstrom-Elektromotor mit Kohlebürsten:
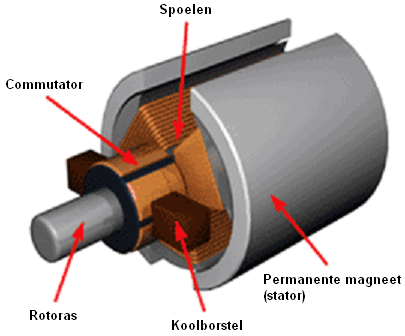
Fast alle Elektromotoren in der Automobiltechnik sind als Gleichstrommotoren mit Permanentmagneten und Kohlebürsten ausgeführt. In dieser Art von Elektromotoren finden wir folgende Magnete:
- Permanentmagnete (ein Nordpol und ein Südpol): Zwischen ihnen herrscht ein stationäres Magnetfeld;
- Spulen: Dabei wird ein elektromagnetisches Feld erzeugt. In den Spulen wird das rotierende elektromagnetische Feld erzeugt.
Die Permanentmagnete befinden sich links und rechts vom Rotor und bestehen aus einem Nordpol und einem Südpol. Zwischen diesem Nord- und Südpol herrscht ein stationäres Magnetfeld, das sich bei Betrieb oder Stillstand des Elektromotors nicht verändert.
Sobald Strom durch die Spulen fließt, entsteht in den Spulen ein rotierendes elektromagnetisches Feld. Die Stromzufuhr und -abfuhr erfolgt durch die Kohlebürsten über den Kommutator.
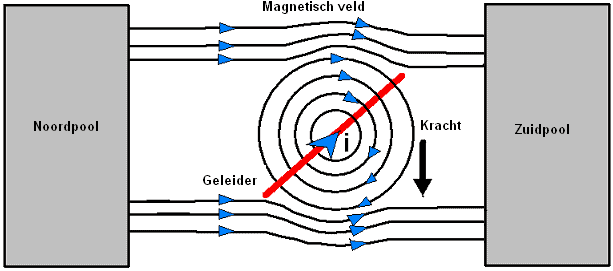
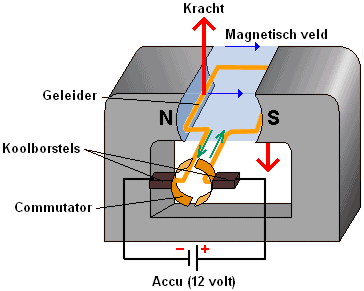
Die Umkehr der Stromrichtung erfolgt durch Kommutierung: Zwei Kohlebürsten schleifen über den Kommutator, der aus einer Plus- und einer Minusseite besteht. Die Kohlebürste auf der Plusseite leitet den Strom zum Leiter (grüne Pfeile in der Abbildung). Der Strom verlässt den Leiter über die Kohlebürste auf der negativen Seite. Der durch den Leiter fließende Strom erzeugt ein elektromagnetisches Feld.
Zwischen dem resultierenden Magnetismus im Anker (dem Leiter) und dem Feld (den Permanentmagneten) entsteht eine Kraft (rote Pfeile im Bild). Diese Kraft bewirkt, dass sich Anker und Kommutator um ihre Achse drehen. Die Kohlebürsten treffen dann auf den anderen Teil des Kommutators und kehren so die Stromrichtung im Anker um. Das Magnetfeld und die Kraft werden in die gleiche Richtung aufgebaut, sodass sich der Anker wieder um seine Achse dreht.
Wir können die Drehrichtung des Elektromotors (sprich: des Ankers) ändern, indem wir Plus und Minus der Kohlebürsten vertauschen.
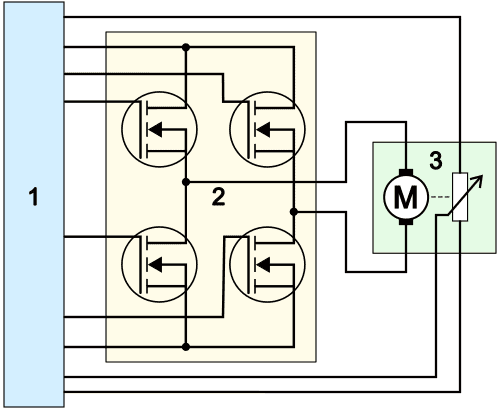
Der Austausch von Plus und Minus kann mittels einer H-Brücke erfolgen.
- Die ECU (1) steuert gleichzeitig zwei der vier Transistoren oder FETs (4);
- Die FETs (2) geben dem Elektromotor (3) Plus und Masse. Je nachdem, welche beiden FETs eingeschaltet sind, ist die obere Kohlebürste positiv und die untere geerdet oder umgekehrt;
- Das Potentiometer neben dem Elektromotor registriert die Position und Drehrichtung. Nicht alle Elektromotoren sind mit einem Potentiometer ausgestattet.
Siehe die Seite H-Brücke zu den möglichen Bauformen und Schaltmethoden der H-Brücke.
Gleichstrom-Elektromotor ohne Kohlebürsten:
Der bürstenlose Gleichstrommotor (DC) ist ein Synchronmotor. Die elektrische Steuerung hat die Kohlebürsten ersetzt. Diese Art von Elektromotor ähnelt stark dem Synchron-Wechselstrommotor mit Permanentmagneten, wie er in den USA verwendet wird Antriebsstrang von Elektrofahrzeugen. Der Hauptunterschied zwischen den beiden Motoren liegt in der Ansteuerung: Der Wechselstrommotor wird mit einer modulierten sinusförmigen Wechselspannung und der Gleichstrommotor mit einer Rechteckspannung angesteuert.
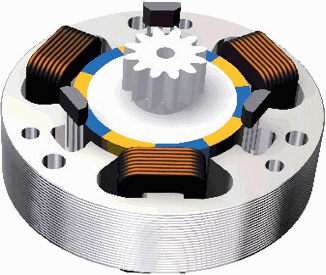
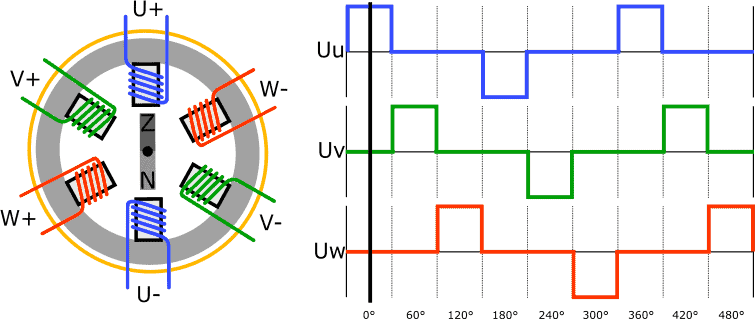
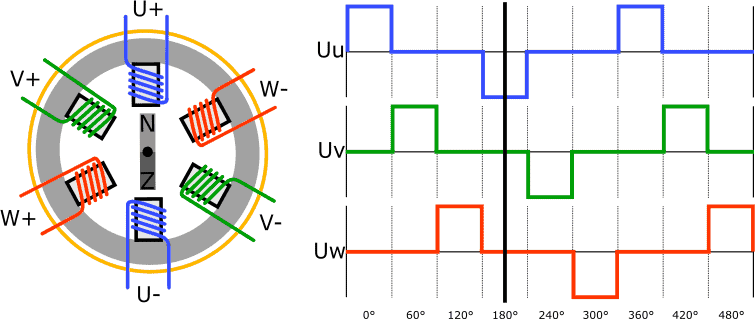
Der Stator enthält oft drei oder sechs Spulen (U, V und W) und der Rotor ist ein Permanentmagnet. Das Bild unten zeigt den schematischen Aufbau des Gleichstrommotors mit dem Spannungsverlauf durch die drei Spulen. In der Realität sind mehrere Hall-Sensoren zwischen den Polen verbaut, um die Rotorlage zu ermitteln.
Die Steuereinheit bestimmt anhand der Rotorposition, welche Spulen sie ansteuern soll.
Im folgenden Bild ist die U+-Spule erregt. Die Art und Weise, wie die Spule um den Pol gewickelt ist, bestimmt, ob es sich um einen Nord- oder Südpol handelt. In diesem Beispiel ist U+ der Nordpol und U- der Südpol.
Der Rotor ist als Permanentmagnet ausgeführt. Wie in den vorherigen Absätzen beschrieben, erfolgt die Positionierung oder Drehung des Rotors durch ein sich änderndes Magnetfeld durch die Spulen.
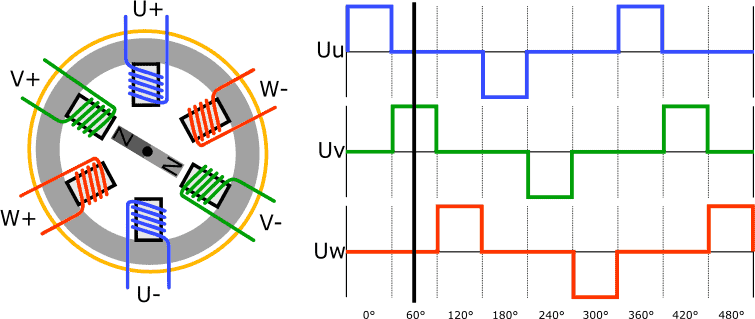
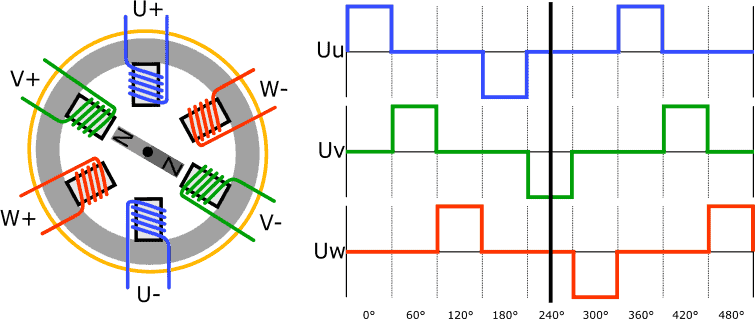
Um den Rotor entgegen dem Uhrzeigersinn aus der in der vorherigen Abbildung gezeigten Position zu drehen, werden die V-Spulen mit Strom versorgt.
Das V+ wird zum Nordpol, V- zum Südpol. Der Permanentmagnetrotor dreht sich;
Nord- und Südpol ziehen sich gegenseitig an, ebenso wie der Süd- und Nordpol auf der anderen Seite des Magneten.
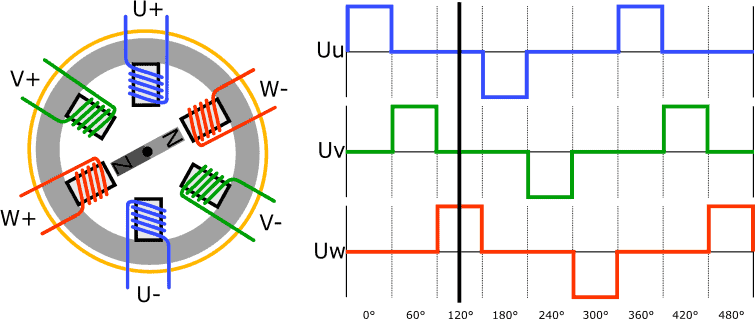
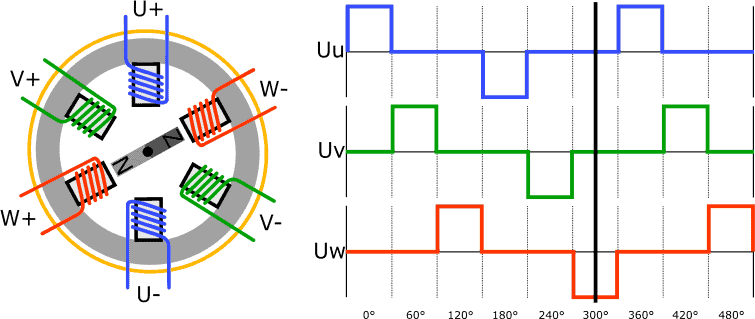
Jetzt werden die W-Spulen mit Strom versorgt, um den Rotor um weitere 60 Grad zu drehen.
Die W+-Spule wird zum Nordpol und W- zum Südpol. Der Rotor dreht sich und nimmt seine neue Position ein.
Der Rotor im nächsten Bild hat sich seit der ersten Situation um 180 Grad gedreht; im ersten Bild zeigte der Südpol nach oben; Das ist nun der Nordpol.
Die Polarität der U+-Spule und der U--Spule ist umgekehrt, wodurch der Strom umgekehrt durch die Spulen fließt. Damit ist U+ ein Südpol und U- ein Nordpol.
Der Rotor mit Permanentmagnet wird durch die Änderung des Magnetfeldes weiter gedreht.
Um den Rotor wieder um 60 Grad zu drehen, wird V- zum Nordpol und V+ zum Südpol gemacht. Der Rotor nimmt die neue Position ein.
Durch eine Änderung des Magnetfeldes in den Spulen dreht sich der Rotor erneut um 60 Grad:
Die W-Spule ist der Nordpol und die W+ der Südpol.
In den oben beschriebenen sechs Situationen werden zwei Spulen gleichzeitig ständig mit Strom versorgt. Auch bürstenlose Gleichstrommotoren finden wir häufig mit drei statt sechs Spulen. Bei drei Spulen werden die U-, V- und W-Spulen ebenfalls nacheinander bestromt, es findet jedoch kein Polaritätswechsel statt.
Der bürstenlose Gleichstrommotor ist ein leistungsstarker Motor, der für Anwendungen geeignet ist, bei denen ein hohes Drehmoment sowohl beim Anfahren als auch bei mittlerer und hoher Drehzahl erforderlich ist. Der bürstenlose Gleichstrommotor und der Schrittmotor werden oft verwechselt. Dies ist nicht verwunderlich, da die Funktionsweise und Steuerung der Motoren viele Ähnlichkeiten aufweist: Beide Motoren werden angetrieben, indem zwischen den Spulen und dem Rotor mit Permanentmagneten ein Magnetfeld erzeugt wird. Doch abgesehen von der Terminologie weisen beide Motoren erhebliche Unterschiede auf, vor allem in der Anwendung und damit in der Materialwahl.
Der Schrittmotor ist im Grunde ein bürstenloser Gleichstrommotor, wird jedoch in einem anderen Bereich eingesetzt. Während der Gleichstrommotor hauptsächlich für den Dauerbetrieb mit hohen Geschwindigkeiten eingesetzt wird, sehen wir den Schrittmotor in Anwendungen, bei denen eine genaue Positionseinstellung am wichtigsten ist.
Der dargestellte Gleichstrommotor wird bei jeder 60°-Rotation des Rotors gesteuert. Dies könnte möglicherweise auf 30° reduziert werden, wenn wir zwischen jeder Steuerung vier Spulen gleichzeitig bestromen und so eine Zwischenposition erhalten. Ein Schrittmotor ist jedoch in der Lage, Schritte von 1,8° bis 0,9° einzustellen. Dies zeigt weiter, dass der Schrittmotor für sehr genaue Positionen geeignet ist.
Die verschiedenen Versionen, die Steuerungsmethoden durch das Steuergerät und die Anwendungen finden Sie auf der Seite Schrittmotor.
