emner:
- introduktion
- Signaler fra resolveren
- Komponenter i resolveren
Forord:
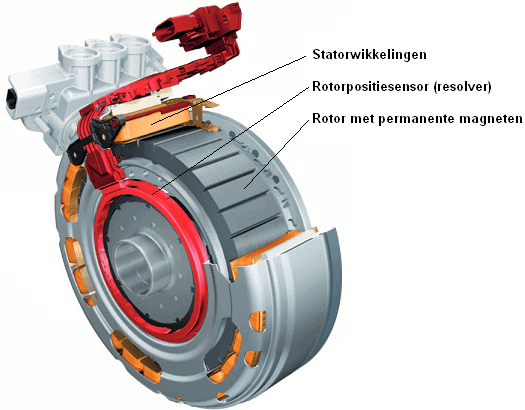
Til driften af synkron elmotor det er vigtigt, at den korrekte gennemskylning baglæns er kontrolleret. For at bestemme hvilken spole (U, V eller W) der skal aktiveres, aflæser inverterens ECU rotorens position, som måles af rotorpositionssensoren, også kaldet "resolveren".
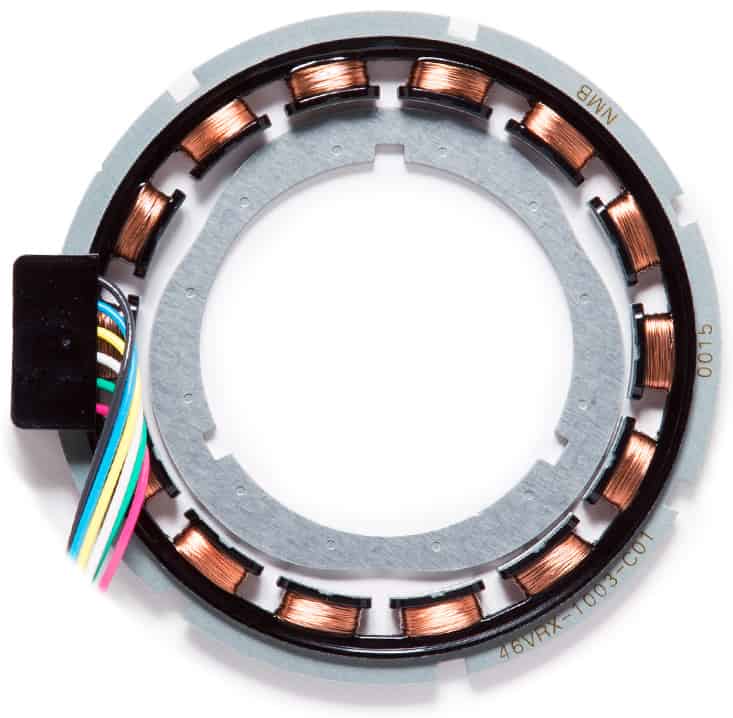
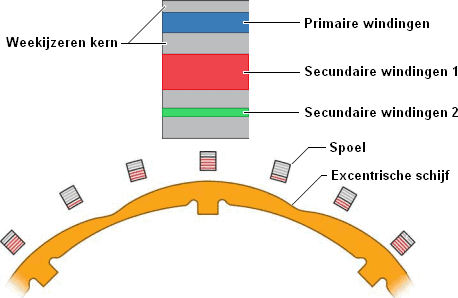
Resolveren består af en ydre ring med et antal spoler på indersiden af en roterende excentrisk plade. Afstanden mellem den excentriske plade og spolerne ændres konstant, når den roterer.
Signaler fra resolveren:
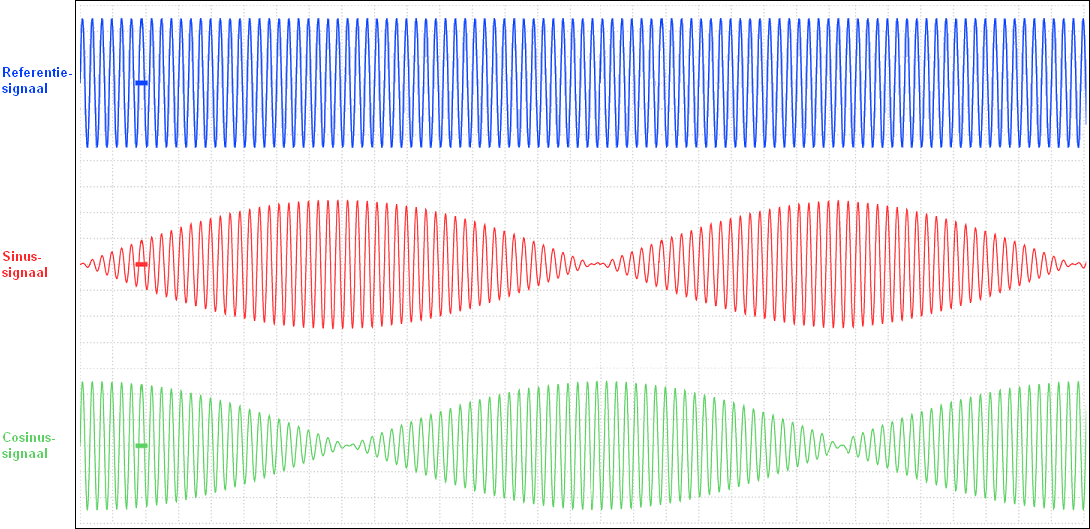
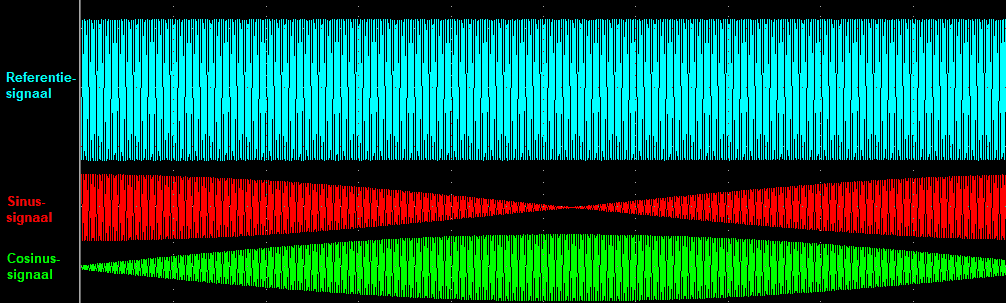
ECU'en forsyner resolveren med et referencesignal. Luftgabet mellem en spole og excentrikken skaber en høj eller lav sinusformet vekselspænding. Med en høj amplitude i det røde eller grønne sinusformede signal (se figuren nedenfor) er luftgabet mellem excentrikken og spolen lille.
Resolveren fungerer både ved stilstand og mens elmotoren kører: i begge tilfælde skal ECU'en vide, i hvilken position rotoren er.
Billedet nedenfor viser de teoretiske signaler. I virkeligheden er frekvensen meget højere, så variationen i amplituden af sinus- og cosinussignalerne er tydeligt synlig.
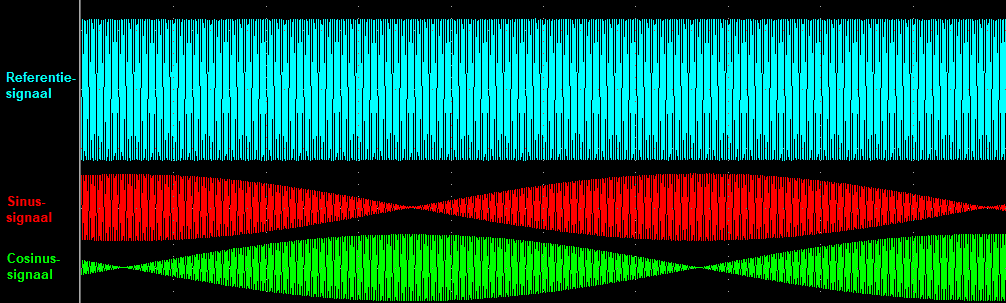
De to billeder nedenfor viser en faktisk måling på en resolver. Også her ser vi referencesignalet øverst, og sinus- og cosinussignalerne nedenfor. Det første billede står stille: elmotoren kører ikke. Højden af sinussignalet og cosinussignalet forbliver konstant. Baseret på niveauet af denne vekselspænding ved ECU'en, hvor rotoren er, når den er stationær.
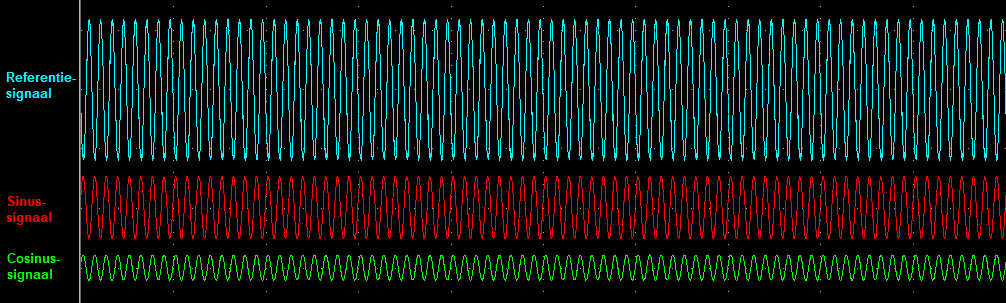
På de næste to billeder er tiden pr. division blevet reduceret. Frekvensen af referencesignalet på resolveren er uændret, men målt over en længere tidsperiode i målingen. Som et resultat ser vi amplituderne af sinus- og cosinussignalerne ændre sig tydeligt. Det første billede blev målt ved lav rotorhastighed og det andet ved øget hastighed. Når hastigheden stiger, stiger frekvensen af sinus- og cosinussignalerne (flere signaler pr. tidsenhed), men amplituden (niveauet af vekselspændingen) forbliver konstant.
Komponenter i resolveren:
Resolveren til VW E-Golf indeholder 30 spoler forbundet i serie. Hver spole i resolveren består af en blød jernkerne med tre forskellige viklinger: primær, sekundær 1 og sekundær 2.
Den primære spole (blå) er forsynet med en højfrekvent vekselspænding.
Antallet af sekundære vindinger (1 rød, 2 grønne) er forskellig på hver spole.
Når den excentriske plades knast bevæger sig langs spolen, forstærkes induktansen i sekundærviklingerne. På grund af antallet af vindinger af sekundærviklingerne 1 og 2 i hver spole resulterer dette også i de forskellige spændinger i sekundærviklingerne. ECU'en i inverteren kan beregne rotorens position baseret på spændingerne i sekundærviklingerne 1 og 2.
Tilpasningen af resolveren til rotoren er meget præcis: Mange producenter foreskriver, at hele elmotoren skal udskiftes, hvis der opstår problemer med resolveren. Efter (ved et uheld) adskille resolveren, eller løsne boltene på ydersiden af elmotorhuset, kan resolveren ikke længere monteres korrekt igen. Også i dette tilfælde foreskriver mange producenter at udskifte den elektriske motor.
Den nøjagtige rotorposition af en synkron motor skal kendes ved stilstand og under kørsel. Hvis sensoren er defekt, kan køretøjet ikke længere køre.
Fra asynkron motor på den anden side er ingen overvågning af rotorpositionen nødvendig. Rotorpositionssensoren udsender fire impulser pr. rotoromdrejning. Denne måling overvåger den maksimale mængde slip mellem det roterende magnetfelt mellem statoren og rotoren. Hall-sensoren bruges ofte som sensor. Hall-sensoren sender impulser til ECU'en, når rotoren drejer, men kan ikke udføre en måling ved stilstand, i modsætning til synkronmotorens resolver. Fabrikanter vælger også nogle gange at bruge synkronmotorens resolver som en rotorpositionssensor.
Relaterede sider: