emner:
- introduktion
- Inverter
- Regenerativ bremsning
Forord:
Elmotorer i køretøjer med fuldelektrisk eller hybrid fremdrift arbejder med vekselstrøm (AC). Energien til elmotoren kommer ikke direkte fra batteriet, da den kun leverer jævnspænding (DC). DC-spændingen fra batteriet føres ind i baglæns omdannet til en vekselspænding for elmotoren.
Derudover finder vi omformere der gør en lav jævnspænding til en højere spænding (boost-konverter). Batterispændingen kan "boostes" op for elmotoren (650 volt), eller sænkes for at oplade det indbyggede batteri (14 volt). Konverteren bruges også til at skifte fra højspænding til lavspænding, for eksempel til at forsyne interiørtilbehøret med en spænding på 12 eller 24 volt (passager- eller tunge erhvervskøretøjer). Klik her for siden om konverteren.
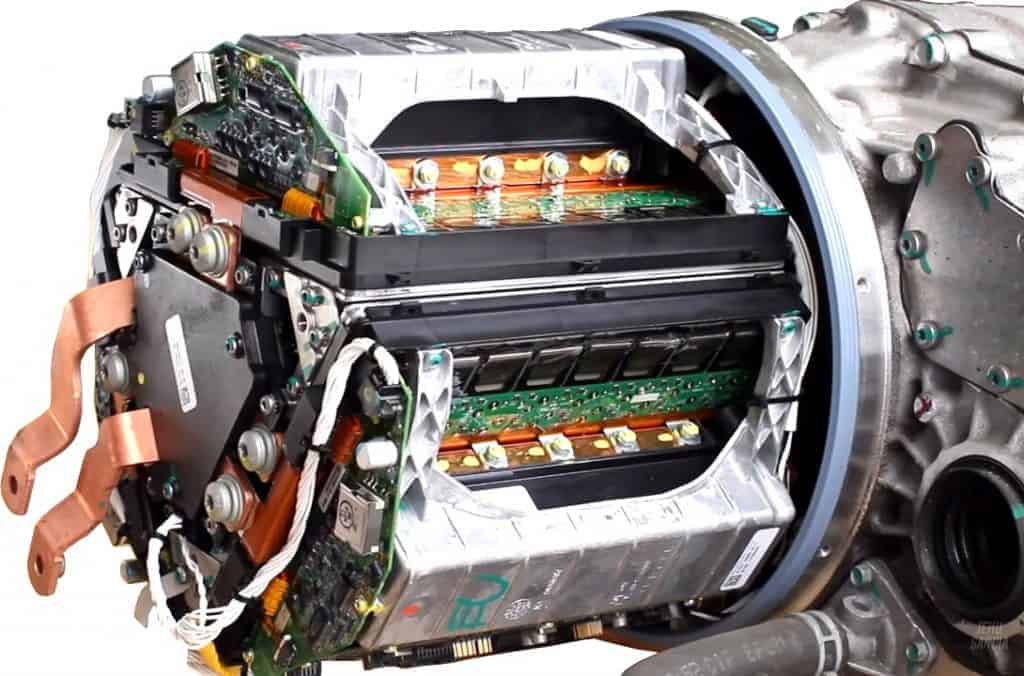
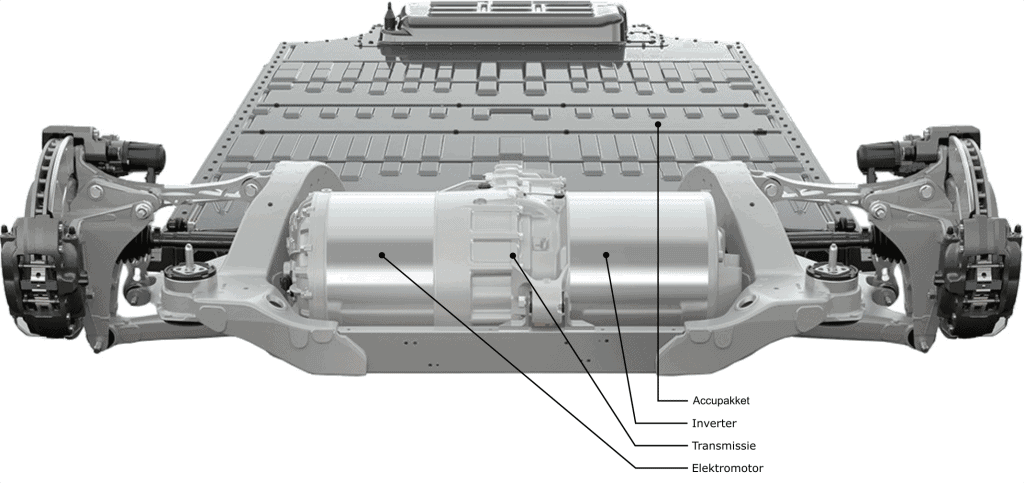
Følgende billede er af en Tesla Model S: inverterens indre og en oversigt over den såkaldte "drivenhed", hvor inverter, transmission og elmotor er placeret i en fælles enhed ved baghjulsophænget.
Inverter:
Billedet i afsnittet "Boost-konverter" viser oversigten med boost-konverteren, inverteren med tolv IGBT'er og to elektriske motorer (MG1 og MG2).
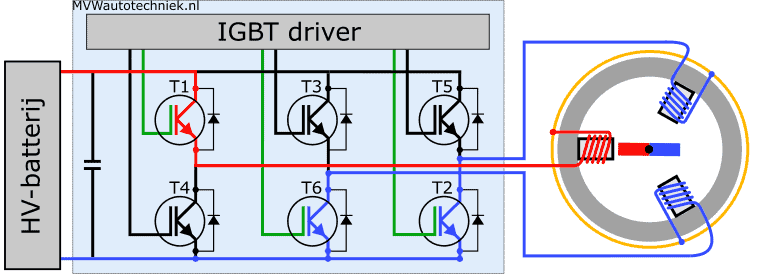
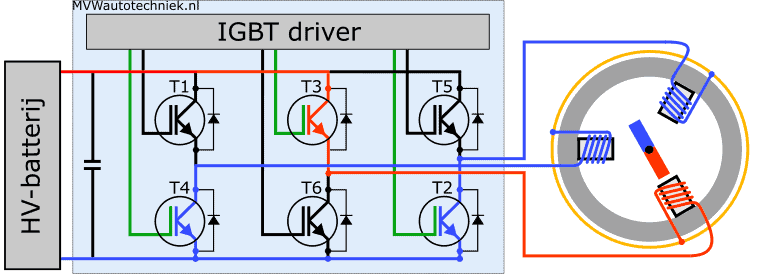
De nederste syv diagrammer viser styringen af transistorerne og strømretningen til og fra statorspolerne. Boost-konverteren og IGBT'erne + MG2 er udeladt for nemheds skyld. Vi ser det til venstre i diagrammet HV batteripakke; dette er højspændingsbatteriet, hvori der er lagret en spænding på ca. 200 til 800 volt. Til højre for batteriet ser vi en kondensator. Når HV-systemet er aktiveret, regulerer HV-beskyttelsessystemet i første omgang en begrænset strøm fra HV-batteripakken ved hjælp af en modstand. Dette gøres for langsomt at oplade kondensatoren, før HV-systemet bliver fuldt operationelt.
Derudover ser vi seks højeffekttransistorer. Det er de IGBT'er, der styrer den elektriske motor. IGBT'erne styres af kontrolenheden; dette er angivet som "IGBT-driver". Til højre ser vi statoren med tre spoler (U, V og W) farvet blå og rød. I midten af statoren er rotoren, der sættes i gang af magnetisme, se afsnittet om elmotoren.
De øverste transistorer (T1, T3 og T5) skifter de positive forbindelser fra HV-batteriet til statorspolerne, når transistorerne tændes af styreenheden. Bundtransistorerne (T2, T4 og T6) leder masserne til højspændingsbatteriets negative.
Gateforbindelserne for de IGBT'er, der i øjeblikket styres, er vist med grønt. Med en synkronmotor "læser" styreenheden motorens position rotorpositionssensor for at bestemme, hvilken IGBT den skal kontrollere. Rotorpositionssensoren kaldes også en resolver kaldes.
1. Kontrollerede IGBT'er:
- T1: plus (100% kontrolleret);
- T2: masse (50 % drevet);
- T6: masse (50 % drevet).
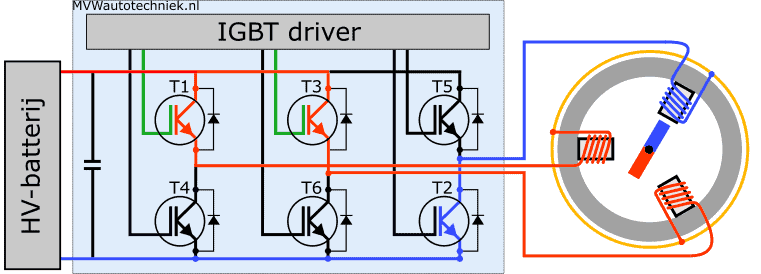
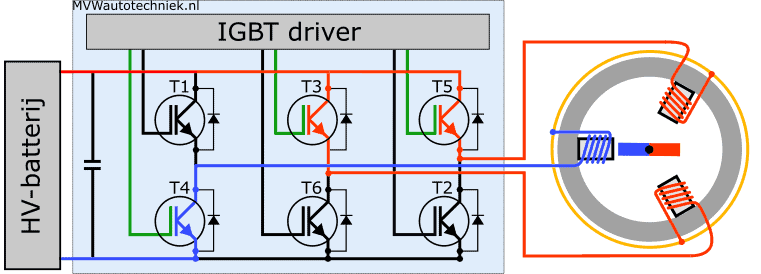
2. Kontrollerede IGBT'er:
- T1: plus (50% kontrolleret);
- T3: plus (50% kontrolleret);
- T2: masse (100 % drevet).
Rotoren drejer som følge af magnetfeltet, der har ændret sig.
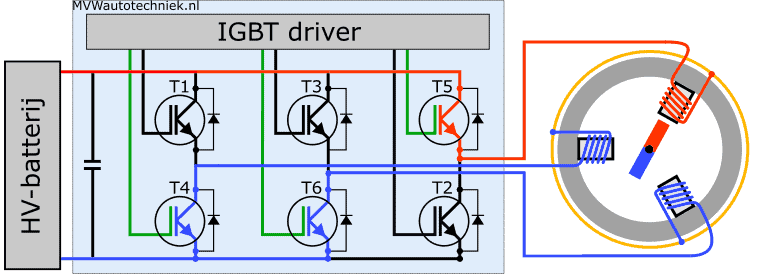
3. Kontrollerede IGBT'er:
- T3: plus (100% kontrolleret);
- T2: masse (50 % drevet);
- T4: masse (50 % drevet).
Rotoren drejer som følge af magnetfeltet, der har ændret sig.
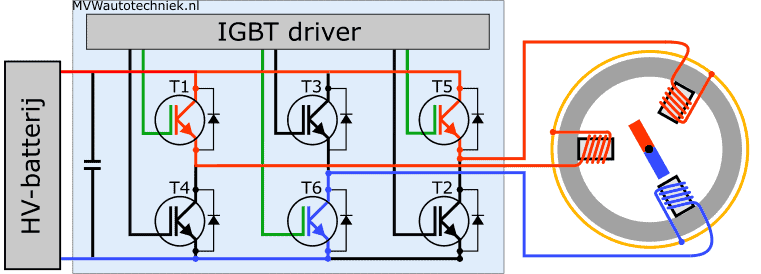
4. Kontrollerede IGBT'er:
- T3: plus (50% kontrolleret);
- T5: plus (50% kontrolleret);
- T4: masse (100 % drevet).
Rotoren drejer som følge af magnetfeltet, der har ændret sig.
5. Kontrollerede IGBT'er:
- T5: plus (100% kontrolleret);
- T4: masse (50 % drevet);
- T6: masse (50 % drevet).
Rotoren drejer som følge af magnetfeltet, der har ændret sig.
6. Kontrolleret IGBT'er:
- T1: plus (50% kontrolleret);
- T5: plus (50% kontrolleret);
- T6: masse (100 % drevet).
Rotoren drejer som følge af magnetfeltet, der har ændret sig.
7. Kontrolleret IGBT'er:
- T1: plus (100% kontrolleret);
- T2: masse (50 % drevet);
- T6: masse (50 % drevet).
Rotoren har nu roteret 360 grader (1 fuld omdrejning) fra situationen i situation 1. Cyklussen med transistorkredsløb gentager sig igen.
Inverteren konverterer DC-spændingen fra HV-batteriet til en 1-faset sinusformet vekselspænding. De tre billeder nedenfor viser:
- Venstre: læsning af spolen;
- Midten: afladning af spolen;
- Højre: spole opladning og afladning kurve.
Vi opnår opladning og afladning af spolen ved at drive bunden af transistoren med en firkantbølgespænding. Når spolen aflades, falder magnetfeltet, og induktionsspændingen skaber en kortvarig induktionsstrøm. Slukningsdioden sørger for, at spolen aflades.

Den 1-fasede sinusform opnås ved at ændre den driftscyklus, hvormed transistoren bliver ledende. Den følgende tekst handler om billederne nedenfor.
- Venstre: ved denne frekvens kan spolen ikke lade tilstrækkeligt op, og der skabes en gennemsnitsspænding;
- Til højre: Duty cycle justeres af IGBT-controlleren. Opladnings- og afladningstiden bestemmer mængden af strøm gennem spolen.
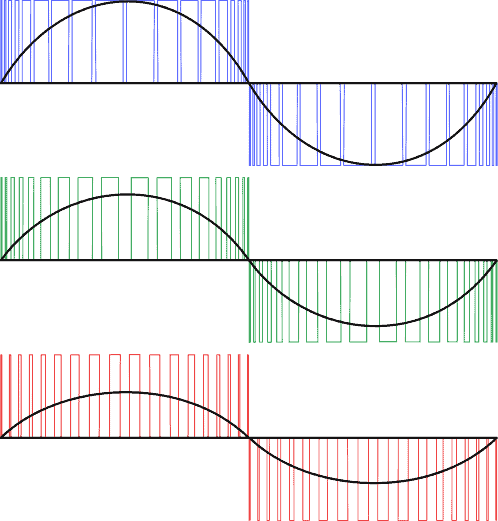
IGBT'erne i inverteren tændes og slukkes kontinuerligt. Forholdet mellem til- og frakobling foregår efter en PWM-styring. Jo bredere pulser (højere duty cycle), jo større strøm strømmer der gennem spolen og desto kraftigere er elmotoren. Den gennemsnitlige strøm er angivet med den sorte sinusbølge. Følgende figur viser tre sinusformede styresignaler:
- Blå: høj kontrol. Duty cycle er høj. Strømmen bliver maksimal.
- Grøn: gennemsnitlig kontrol. Duty cycle-procenten er lavere end ved høj kontrol. Strømmen er derfor lavere.
- Rød: lav kontrol. Igen er duty cycle-procenten faldet. Strømintensiteten er halveret i forhold til den maksimale kontrol.
Sinusbølgen er positiv i en halv periode og negativ for den anden halvdel. IGBT'erne i DC-AC inverteren er forbundet på en sådan måde, at en jævnspænding (DC) omdannes til en vekselspænding (AC). Strømretningen gennem statorspolerne vendes periodisk.
forøgelse af antallet af sinusoider pr. tidsenhed øger rotorhastigheden.
Følgende animation viser styringen af inverteren. Under inverteren kan du se tidsforløbet for tre faser. Rotoren roterer to hele omdrejninger (360 grader) i animationen. Hver rotation er opdelt i seks tidsenheder (1 til 6). Nedenfor ser du farvede søjler:
- Mørkeblå: T1
- Grøn: T2
- Lyseblå: T3
- Orange: T4
- Pink: T5
- Rød: T6
Vi fokuserer på den første halve omdrejning af tidens gang:
- Fra 0 til 180 grader drejer rotoren en halv omdrejning. IGBT T1 blev kontrolleret i denne periode.
- Mellem 0 og 60 grader var udover T1 også T5 og T6 aktive.
- T1 skifter plus, T5 og T6 jord. Hver transistor havde sin egen driftscyklus, varierende mellem 50 og 100%.
- Ved 60 grader overtager T2 fra T5: Strømretningen i spolen vendes.
- I det øjeblik er der vekselspænding: fordi strømretningen har ændret sig, er strømintensiteten negativ.
For at styre de korrekte spoler i AC-synkronelektromotoren med inverteren, ser inverteren på signalet fra resolver. Resolveren registrerer rotorens position både når den står stille og når den roterer.
Regenerativ bremsning:
Ved bremsning af motoren bruges elmotoren som generator (dynamo). Køretøjets kinetiske energi omdannes til elektrisk energi: Batteriet oplades.
IGBT'erne er slukket under regenerativ bremsning: føreren kontrollerer dem ikke. Ensretterdioderne mellem source og drain af IGBT'erne fungerer som en ensretter til at omdanne AC-spændingen fra motoren til DC-spænding for batteriet.
Fuldt elektriske og hybride køretøjer har udover muligheden for elektrisk bremsning også et konventionelt, hydraulisk bremsesystem til at bremse med bremseklodser og bremseskiver. De forskellige teknikker og kontrolprincipper kan findes på siden: bremsning af elbiler.