emner:
- introduktion
- AC elektrisk motor (synkron, med permanente magneter)
- AC-styring af synkronmotoren
- AC elektrisk motor (asynkron, egernburmotor)
- Effektivitetskort over den synkrone og asynkrone elektriske motor
Forord:
En elmotor bruges til at køre et hybrid- eller fuldelektrisk køretøj. Den elektriske motor omdanner elektrisk energi (fra batteriet eller rækkeviddeforlængeren) til bevægelse for at drive hjulene. Derudover kan elmotoren også omdanne kinetisk energi til elektrisk energi, når motoren bremses: regenerativ bremsning. I så fald fungerer elmotoren som dynamo. På grund af disse to funktioner kalder vi også den elektriske motor for en "elektrisk maskine".
Mulighederne for at placere elmotoren i et hybridbil er:
- På forbrændingsmotoren, hvor transmissionen opnås via en multirem eller direkte via krumtapakslen;
- Mellem motoren og gearkassen: gearkassens indgangsaksel drives af elmotoren;
- Integreret i gearkassen;
- På differentialet;
- Ved hjulnavene (navmotor).
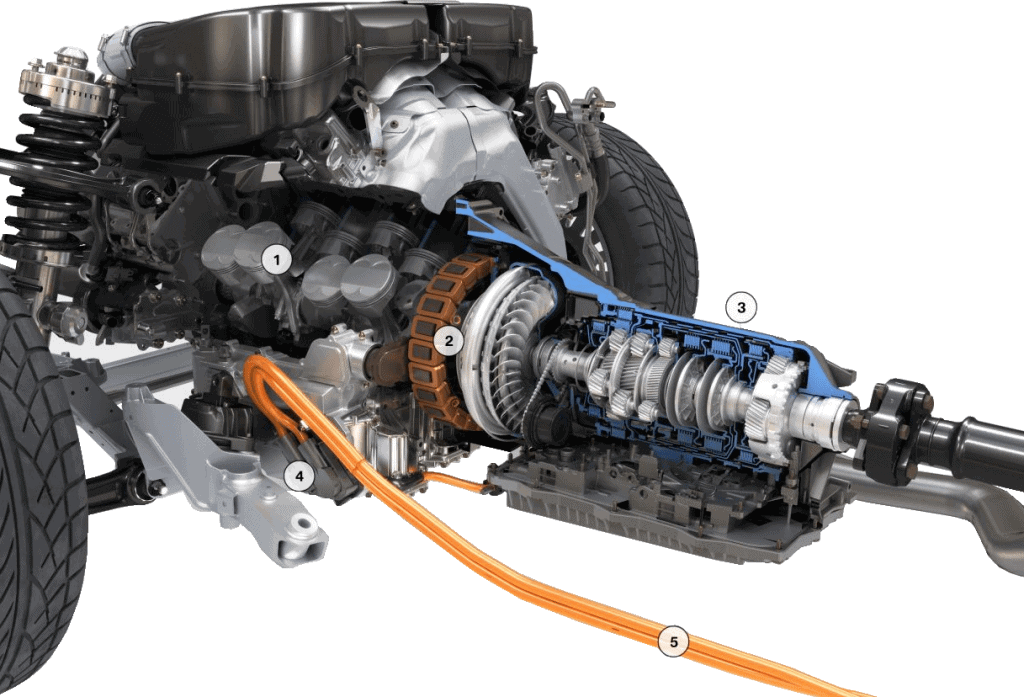
Elmotoren i en fuldelektrisk bil er ofte monteret på bagakslen. Billedet nedenfor viser elmotoren med inverteren i et cylindrisk hus og slutdrevet af en Tesla.

AC elektrisk motor (synkron, med permanente magneter):
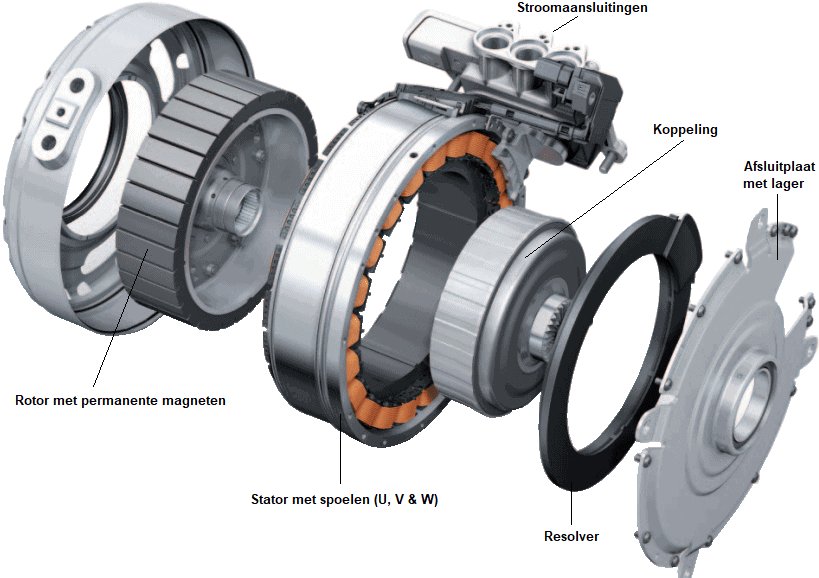
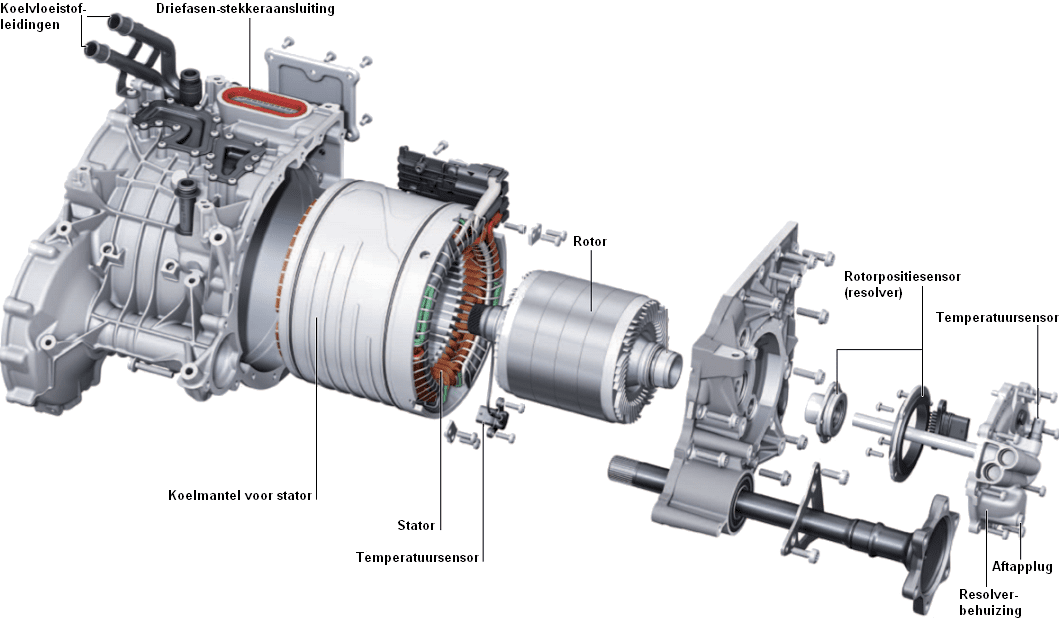
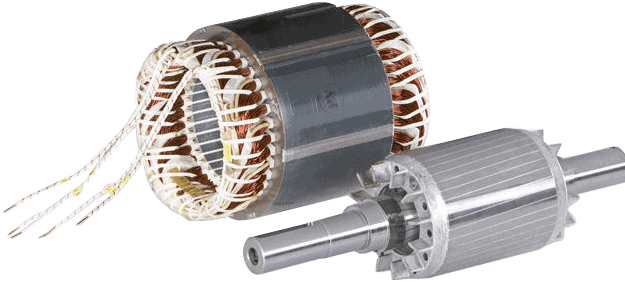
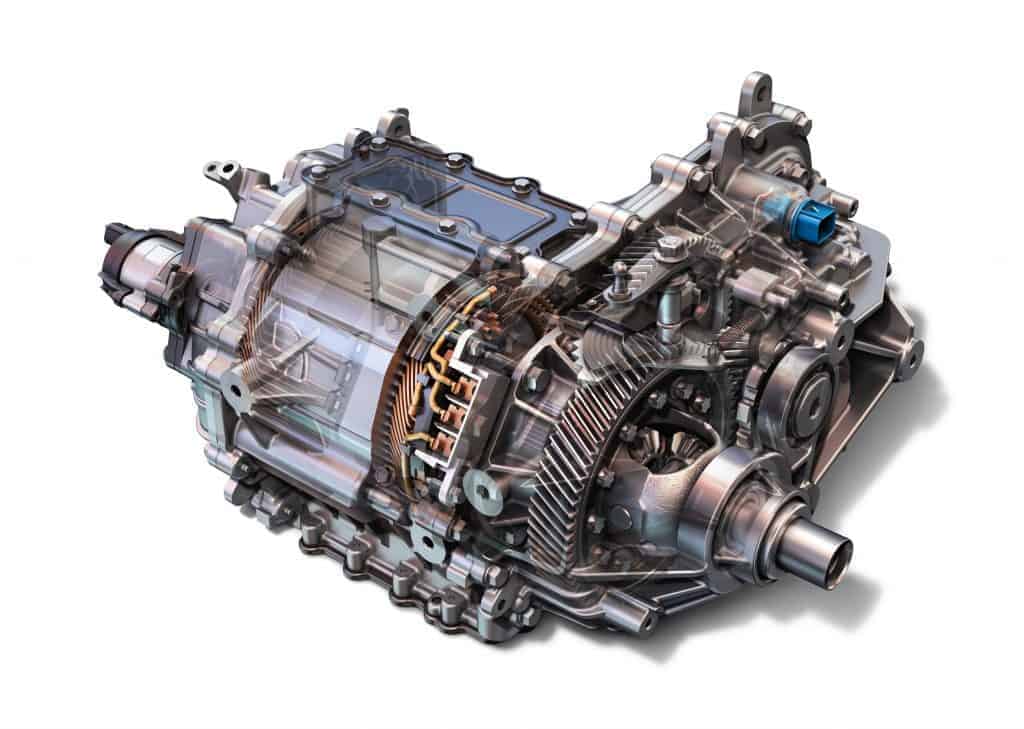
Følgende billede viser delene af en Audi (synkron) elmotor. Denne type bruges i hybridvarianterne af A6 og A8. Vi vil kort liste komponenterne. Disse komponenter er beskrevet detaljeret i de følgende afsnit.
Rotoren med permanente magneter vil begynde at rotere som følge af en ændring i magnetfeltet i statoren. Rotoren er forbundet med koblingen, som kan tilslutte eller frakoble forbrændingsmotoren og elmotoren (sammen med en kobling (ikke vist)) under forskellige driftsforhold. Rotorens position bestemmes af resolver målt: disse data er vigtige for IGBT-driverne til at styre statorspolerne på det rigtige tidspunkt.
Elmotoren med permanente magneter kan styres af både DC (jævnspænding) og AC (vekselspænding).
Synkronmotoren er en af de mest brugte elmotorer i hybrid- eller fuldelektriske køretøjer. Denne type elektrisk motor består af en stator med viklinger og en rotor med flere permanente magneter. Rotoren roterer med samme hastighed som statorens magnetfelt. Synkronmotoren kan styres som følger:
- AC: styret af et sinusformet signal (vekselstrøm).
- DC: styret med et kvadratisk eller trapezformet signal (jævnstrøm)
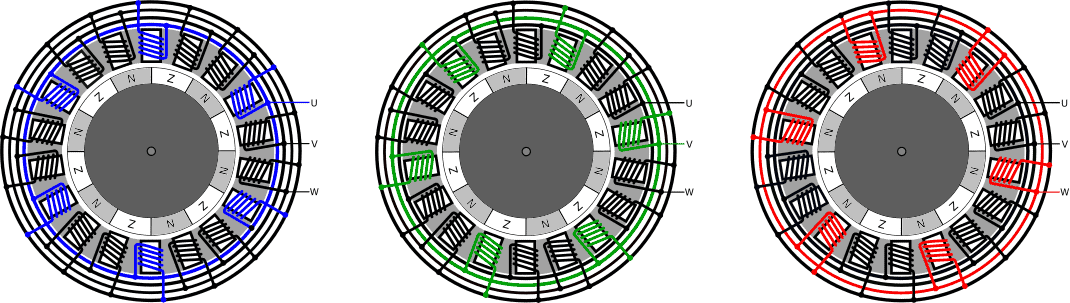
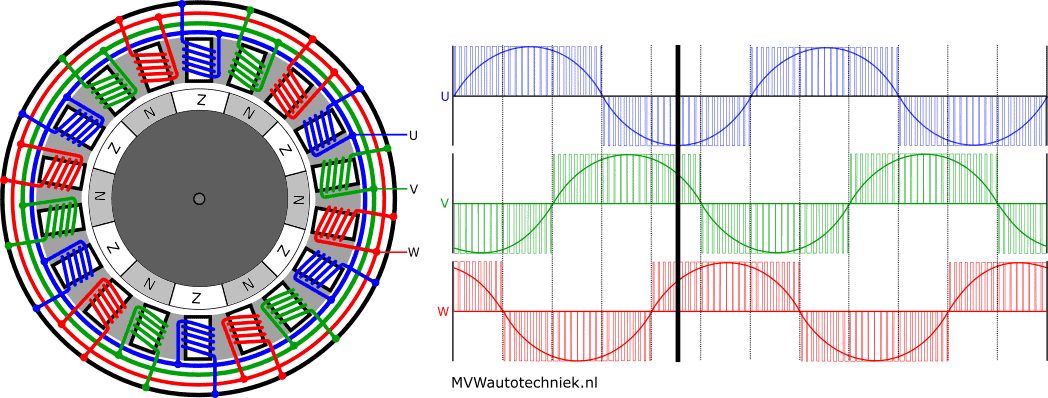
Synkronmotorens stator er opbygget af tre statorspolegrupper: U, V og W. Hver gruppe indeholder tre sæt af seks parallelkoblede spoler, som er fordelt over hele statorens omkreds. Hver tredje spole tilhører samme serie.
- U-spoler: blå
- V-spoler: grøn
- W spoler: rød
Rotoren indeholder flere permanente magneter. Ved skiftevis at aktivere spoler i statoren skabes et roterende magnetfelt. Rotoren følger rotationsfeltet og roterer derfor.
AC-styring af synkronmotoren:
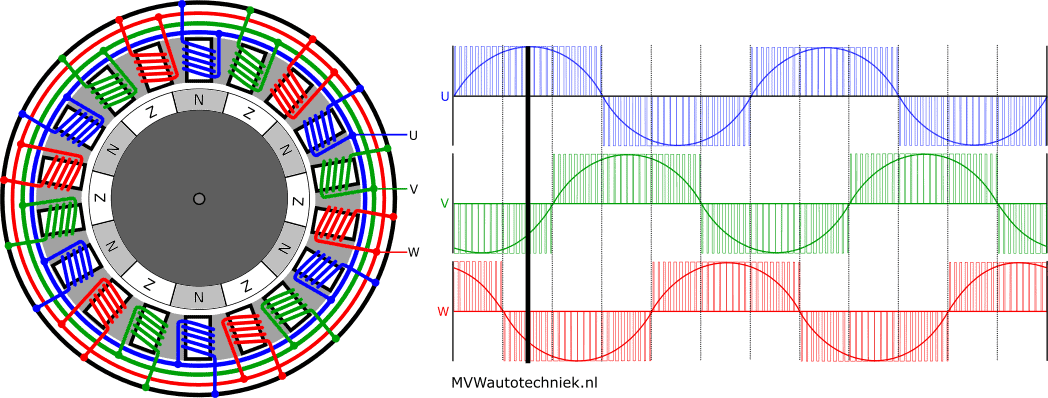
AC-styringen bruger frekvensstyret styring eller sinusformet kommutering. Statorspolerne er forsynet med en vekslende trefaset sinusbølgespænding for at rotere rotoren.
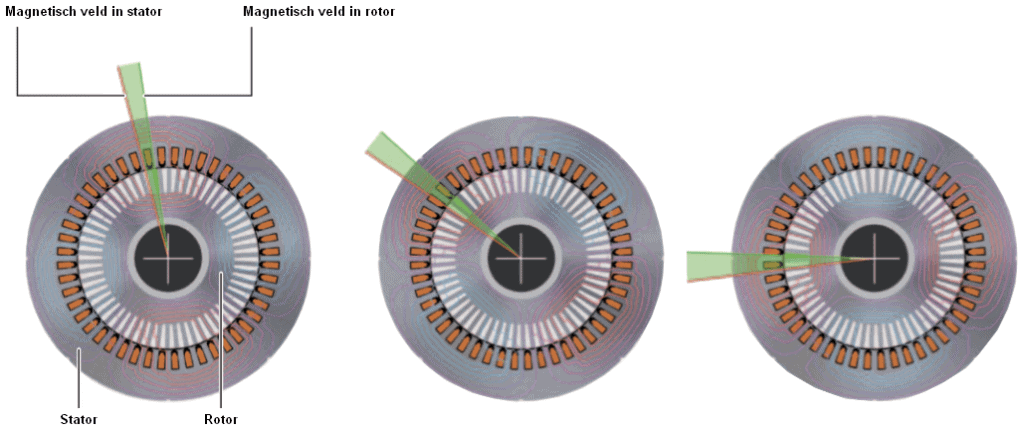
Billedet nedenfor viser rotorens position med en maksimal exciteret U-spole. Som et resultat af magnetfeltet har nordpolerne placeret sig direkte modsat de aktiverede U-spoler. Markøren i grafen ved siden af elmotoren angiver styringen af spolerne på det tidspunkt.
Til din orientering: rotoren i forklaringen roterer, når statorspolerne styres højreom.
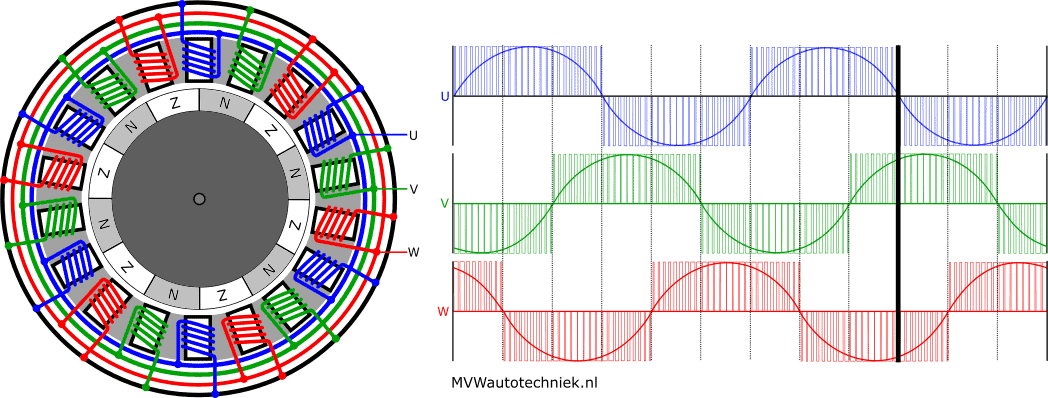
På det følgende billede er sinusbølgen, det vil sige vekselstrømmen gennem U-spolen, maksimalt negativ. Under denne kontrol er rotorens sydpoler direkte modsat de aktiverede (U) statorspoler.
Der er faktisk en lille luftspalte mellem rotorens nord- og sydpol. Under skiftet fra syd- til nordpolen ændres strømretningen i U-spolen. Yderligere:
- Strømmen gennem V-spolen (grøn) er næsten maksimalt positiv; nordpolen er også næsten modsat spolen.
- Strømmen gennem W-spolen har været maksimal negativ og er stigende. Sydpolen har roteret forbi spolen.
For at give et indtryk af, hvordan strømmen løber, viser animationen herunder rotorens rotation på grund af vekselstrømmen.
AC elektrisk motor (asynkron, egernburmotor):
Egernburet eller kortslutningsankerets elektriske motor er en asynkronmotor. Forskellen mellem synkronmotoren med permanente magneter og asynkronmotoren er i rotoren: dette er en blød jerntromle med ledere i længderetningen. Rotoren kører asynkront med statoren, hvilket betyder, at der er en hastighedsforskel mellem rotoren og statorens magnetiske hastighed. Statoren er nøjagtig den samme.
Rotoren på den asynkrone elektriske motor består af kortsluttede spoler; U-, V- og W-spolerne er forbundet med hinanden på den ene side. Når rotoren er i statorens rotationsfelt, skabes en induktionsspænding i rotorspolerne. Fordi rotorspolerne er kortsluttet med hinanden, løber en strøm gennem dem. Denne strøm får rotoren til at generere et magnetfelt, hvilket skaber et drejningsmoment. Fordi driften af den asynkrone elektriske motor er baseret på loven om induktion, kalder vi det også en induktionsmotor.
Det leverede drejningsmoment påvirker glidningen mellem det roterende magnetfelt i statoren og rotorens hastighed.
Asynkronmotoren har en række fordele og ulemper i forhold til synkronmotoren.
Fordele:
- relativt enkel, robust og billig rotor;
- højt drejningsmoment ved lav hastighed.
ulemper:
- lavere effekttæthed (pr. masse) og effektivitet (effektivitet). Strømmene i de kortsluttede rotorspoler giver anledning til yderligere rotortab;
- hastigheden kan ikke kontrolleres nøjagtigt, fordi den afhænger af belastningen. Dette behøver i sig selv ikke at være en ulempe: med et godt styresystem kan hastigheden på asynkronmotoren også justeres;
- høj startstrøm.
Asynkronmotorens rotorposition og hastighed måles med a rotorpositionssensor. Hall-sensorer giver ofte mindst fire impulser pr. omdrejning af rotoren for at overføre rotorens position og hastighed. Vi kalder ikke denne type rotorpositionssensor for en resolver, som det er tilfældet med synkronmotoren.
I modsætning til synkronmotoren er rotorpositionssensoren ikke nødvendig for at kende rotorens position ved stilstand. Rotorens position er vigtig under rotation: man skal sørge for, at glidningen mellem det magnetiske rotationsfelt og rotoren ikke bliver for stor. Når rotationsfeltet bevæger sig for hurtigt, kan der opstå en situation, hvor rotoren pludselig vil dreje i den anden retning. De kræfter, der opstår, kan være katastrofale for de mekaniske og elektriske komponenter.
Nogle producenter vælger også at bruge en asynkronmotor resolver ansøger. Årsagen er ukendt for mig. Under alle omstændigheder er resolveren ekstremt præcis både når den står stille og når den løber, hvilket kan gavne den præcise kontrol.
Effektivitetskort over den synkrone og asynkrone elektriske motor:
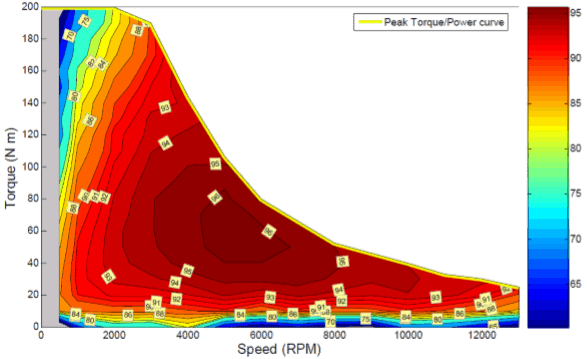
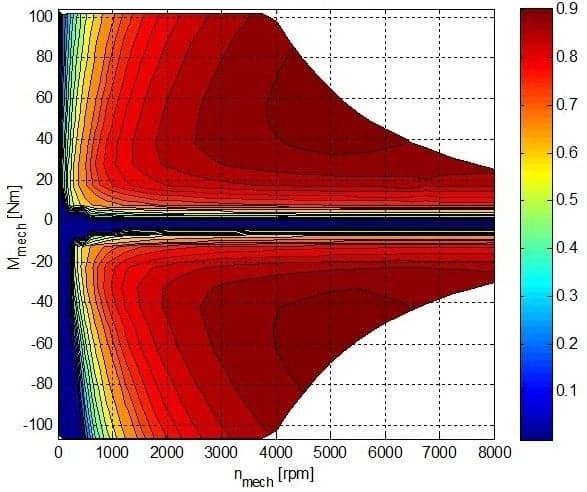
Billederne nedenfor viser effektiviteten af den synkrone elmotor (venstre) og den asynkrone elmotor (højre).
- Den synkrone elmotor er meget effektiv. Effektiviteten er over 90% i et stort område, med spidsværdier på op til 96%. Fra 2000 omdr./min. sker der en feltsvækkelse, hvilket får det maksimale drejningsmoment til at falde.
- Asynkronmotoren har en væsentlig lavere virkningsgrad end synkronmotoren ved lavere hastigheder.
Relaterede sider: