emner:
- introduktion
- Arbejdsprincip for elektriske motorer
- DC elmotor med kulbørster
- DC elmotor uden kulbørster
Forord:
Vi finder elmotorer flere og flere steder i bilen. I en elektrisk motor omdannes en elektrisk strøm til bevægelse og varme. Vi finder en elmotor i spejl og sædejustering, men også som vinduesviskermotor på vinduesviskermekanismen eller som startmotor. Disse elektriske motorer arbejder ved en spænding på 12 til 14 volt. På denne side begrænser vi os til elmotorerne indvendigt og udvendigt.
Elektriske motorer giver også (delvis) elektrisk fremdrift i hybrid- og fuldt elektriske køretøjer. Denne type elmotor er omtalt på siden: HV elektriske motorer.
Vi kan opdele DC-elektriske motorer i:
- Elektrisk motor med kulbørster (elektromagnetisk felt og armatur)
- Serie elektriske motorer;
- Parallelle elektriske motorer;
- Børsteløse elmotorer.
Driftsprincip for elektriske motorer:
I en elektrisk motor omdannes en elektrisk strøm til en roterende bevægelse. Bevægelsen er forårsaget af to magnetiske poler, der tiltrækker eller frastøder hinanden:
- En nordpol og sydpol tiltrækker hinanden;
- To nordpoler frastøder hinanden;
- To sydpoler frastøder hinanden.
En magnet har en nord- og sydpol med modsatte ladninger. Når den magnet er knækket på midten, har man ikke pludselig to separate poler, men to nye magneter, begge med en nord- og en sydpol.
Flere magnetiske poler (nord og syd) er fastgjort til huset. Der er et magnetfelt mellem nord- og sydpolen. Udgangsakslen (ankeret) roterer på grund af ændringer i magnetfeltet.
I en elektrisk motor er to poler af samme navn konstant placeret over for hinanden ved hjælp af (normalt) permanente magneter, eller også elektromagneter. Fordi polerne af samme navn frastøder hinanden, skabes en bevægelse.
DC elmotor med kulbørster:
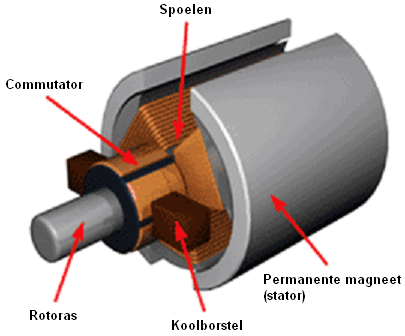
Næsten alle elektriske motorer inden for bilteknologi er designet som jævnstrømsmotorer med permanente magneter og kulbørster. I denne type elektriske motorer finder vi følgende magneter:
- Permanente magneter (en nordpol og en sydpol): der er et stationært magnetfelt mellem dem;
- Spoler: der genereres et elektromagnetisk felt i denne. Det roterende elektromagnetiske felt genereres i spolerne.
De permanente magneter er placeret til venstre og højre for rotoren og består af en nordpol og en sydpol. Mellem denne nord- og sydpol er der et stationært magnetfelt, som ikke ændrer sig, når elmotoren er i drift eller står stille.
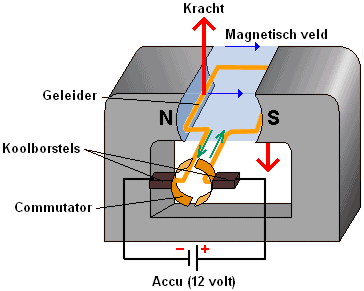
Et roterende elektromagnetisk felt genereres i spolerne, så snart der løber strøm gennem dem. Strømmen tilføres og fjernes af kulbørsterne via kommutatoren.
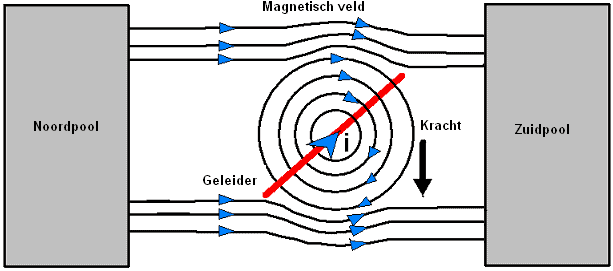
At vende strømretningen sker ved hjælp af kommutering: to kulbørster trækker hen over kommutatoren, som består af en plus- og minusside. Kulbørsten på plussiden fører strømmen til lederen (grønne pile i figuren). Strømmen forlader lederen via kulbørsten på den negative side. Strømmen, der strømmer gennem lederen, skaber et elektromagnetisk felt.
Der skabes en kraft mellem den resulterende magnetisme i ankeret (lederen) og feltet (de permanente magneter) (røde pile i billedet). Denne kraft får ankeret og kommutatoren til at rotere om deres akse. Kulbørsterne ramte derefter den anden del af kommutatoren og vendte strømretningen i armaturet. Magnetfeltet og kraften bygges op i samme retning, så ankeret igen drejer rundt om sin akse.
Vi kan ændre omdrejningsretningen på den elektriske motor (læs: ankeret) ved at vende plus og minus på kulbørsterne.
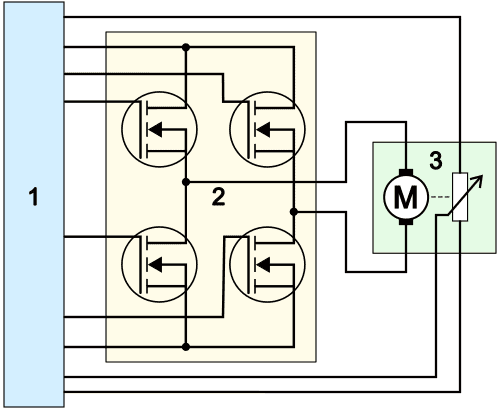
Udskiftning af plus og minus kan opnås ved hjælp af en H-bro.
- ECU'en (1) styrer samtidigt to af de fire transistorer eller FET'er (4);
- FET'erne (2) giver den elektriske motor (3) et plus og jord. Afhængigt af hvilke to FET'er der er tændt, er den øverste kulbørste positiv og bunden er slebet eller omvendt;
- Potentiometeret ved siden af elmotoren registrerer positionen og omdrejningsretningen. Ikke alle elektriske motorer er udstyret med et potentiometer.
Se siden H-bro for de mulige designs og koblingsmetoder af H-broen.
DC elmotor uden kulbørster:
Den børsteløse jævnstrømsmotor (DC) er en synkronmotor. Den elektriske styring har erstattet kulbørsterne. Denne type elektrisk motor minder meget om den synkrone AC-motor med permanente magneter, som bruges i drivaggregatet til elektriske køretøjer. Hovedforskellen mellem de to motorer er styringen: AC-motoren styres med en moduleret sinusformet vekselspænding og DC-motoren med en firkantbølgespænding.
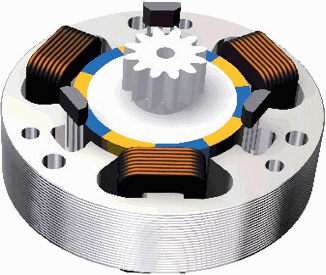
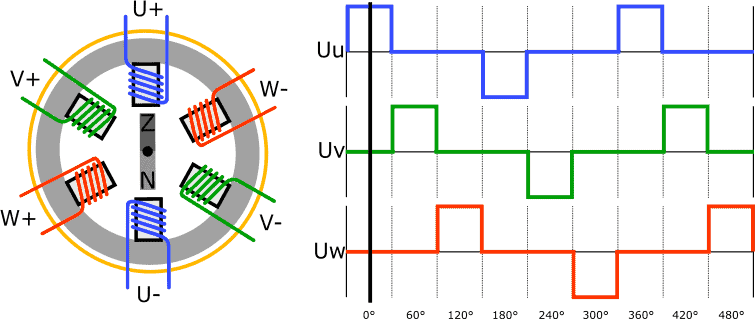
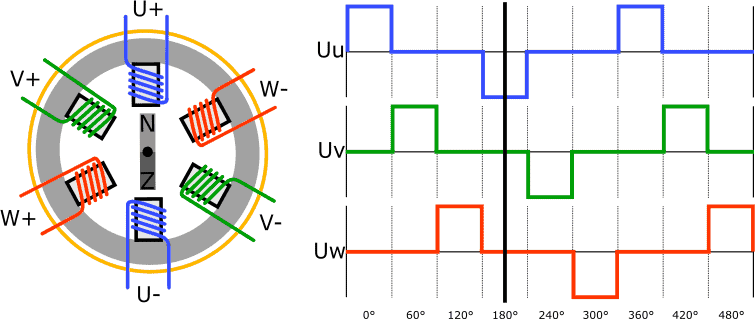
Statoren indeholder ofte tre eller seks spoler (U, V og W), og rotoren er en permanent magnet. Billedet nedenfor viser den skematiske struktur af DC-motoren med spændingsforløbet gennem de tre spoler. I virkeligheden er der installeret flere Hall-sensorer mellem polerne for at bestemme rotorpositionen.
Styreenheden bestemmer, hvilke spoler den skal styre ud fra rotorpositionen.
På det følgende billede er U+-spolen strømførende. Måden spolen er viklet rundt om polen afgør, om det bliver en nord- eller sydpol. I dette eksempel er U+ nordpolen og U- er sydpolen.
Rotoren er designet som en permanent magnet. Som beskrevet i de foregående afsnit, positionerer eller roterer rotoren som et resultat af et skiftende magnetfelt gennem spolerne.
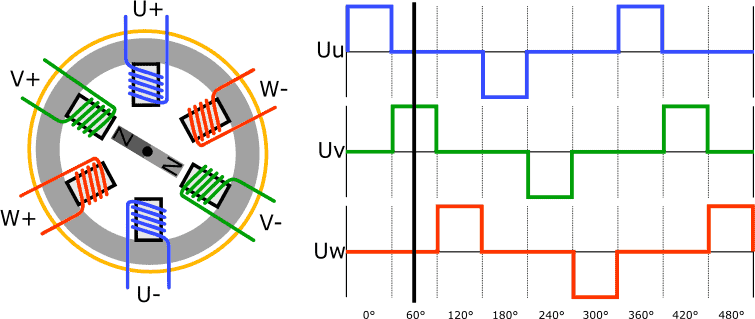
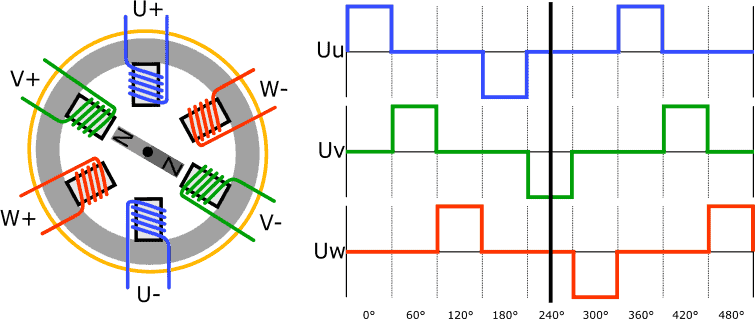
For at rotere rotoren mod uret fra positionen vist i den foregående figur, aktiveres V-spolerne.
V+ bliver nordpolen, V- sydpolen. Den permanente magnetrotor roterer;
nord- og sydpolen tiltrækker hinanden, ligesom syd- og nordpolen på den anden side af magneten.
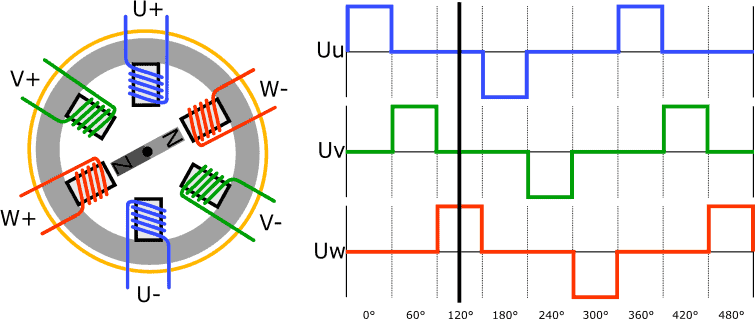
Nu aktiveres W-spolerne for at rotere rotoren yderligere 60 grader.
W+-spolen bliver en nordpol og W- sydpolen. Rotoren drejer og indtager sin nye position.
Rotoren på det næste billede har roteret 180 grader siden den første situation; på det første billede pegede sydpolen opad; nu er det Nordpolen.
Polariteten af U+-spolen og U-spolen er vendt, hvilket får strømmen til at flyde omvendt gennem spolerne. Dette gør U+ til en sydpol og U- til en nordpol.
Rotoren med permanent magnet roteres yderligere ved ændringen i magnetfeltet.
For at dreje rotoren 60 grader igen, gøres V- til en nordpol og V+ til en sydpol. Rotoren indtager den nye position.
Endnu en gang drejer rotoren 60 grader som følge af en ændring i magnetfeltet i spolerne:
W-spolen er nordpolen og W+ er sydpolen.
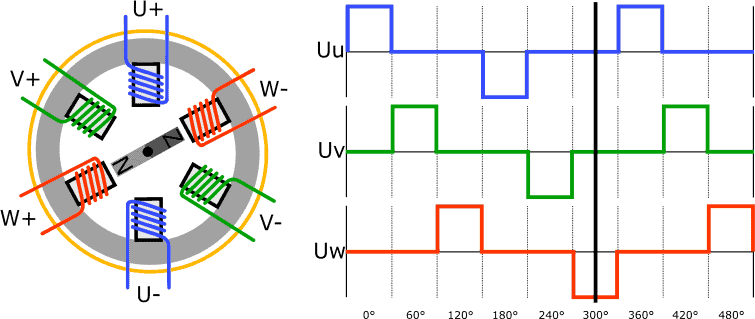
I de seks situationer, der er beskrevet ovenfor, er to spoler konstant aktiveret på samme tid. Vi finder også ofte børsteløse DC-motorer med tre spoler i stedet for seks. Med tre spoler aktiveres U-, V- og W-spolerne også efter hinanden, men der er ingen ændring i polariteten.
Den børsteløse DC-motor er en kraftig motor, der er velegnet til applikationer, hvor der kræves et højt drejningsmoment til både opstart, mellemhastighed og høj hastighed. Den børsteløse jævnstrømsmotor og stepmotoren er ofte forvekslet. Dette er ikke overraskende, fordi driften og styringen af motorerne har mange ligheder: Begge motorer drives ved at skabe et magnetfelt mellem spolerne og rotoren med permanente magneter. Men ud over terminologien har begge motorer betydelige forskelle, primært i anvendelsen og derfor materialevalget.
Stepmotoren er dybest set en børsteløs DC-motor, men den anvendes i et andet felt. Hvor DC-motoren hovedsageligt anvendes til langtidskørsel ved høje hastigheder, ser vi stepmotoren i applikationer, hvor en justering i en nøjagtig position er den vigtigste.
Den viste DC-motor styres for hver 60° rotation af rotoren. Dette kunne muligvis reduceres til 30°, hvis vi aktiverer fire spoler samtidigt mellem hver kontrol, og dermed opnår en mellemposition. En stepmotor er dog i stand til at justere trin på 1,8° til 0,9°. Dette viser yderligere, at stepmotoren er velegnet til meget nøjagtige positioner.
De forskellige versioner, styremetoderne fra ECU'en og applikationerne kan findes på siden trinmotor.
