Předměty:
- Úvod
- Princip činnosti elektromotorů
- Stejnosměrný elektromotor s uhlíkovými kartáči
- Stejnosměrný elektromotor bez uhlíkových kartáčů
Předmluva:
Elektromotory najdeme v autě na stále více místech. V elektromotoru se elektrický proud přeměňuje na pohyb a teplo. Elektromotor najdeme v nastavení zrcátka a sedadla, ale také jako motorek stěračů na mechanismu stěračů nebo jako startovací motorek. Tyto elektromotory pracují s napětím 12 až 14 voltů. Na této stránce se omezíme na elektromotory v interiéru a exteriéru.
Elektromotory také zajišťují (částečně) elektrický pohon v hybridních a plně elektrických vozidlech. Tento typ elektromotoru je popsán na stránce: HV elektromotory.
Stejnosměrné elektromotory můžeme rozdělit na:
- Elektromotor s uhlíkovými kartáči (elektromagnetické pole a kotva)
- Sériové elektromotory;
- Paralelní elektrické motory;
- Bezkomutátorové elektromotory.
Princip činnosti elektromotoru:
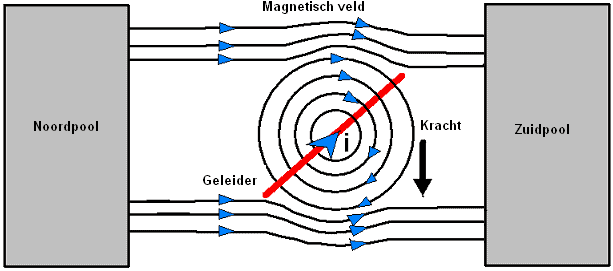
V elektromotoru se elektrický proud přeměňuje na rotační pohyb. Pohyb je způsoben dvěma magnetickými póly, které se navzájem přitahují nebo odpuzují:
- Severní a jižní pól se navzájem přitahují;
- Dva severní póly se navzájem odpuzují;
- Dva jižní póly se navzájem odpuzují.
Magnet má severní a jižní pól s opačnými náboji. Když se tento magnet rozlomí napůl, nemáte najednou dva samostatné póly, ale dva nové magnety, oba se severním a jižním pólem.
K pouzdru je připevněno několik magnetických pólů (severní a jižní). Mezi severním a jižním pólem je magnetické pole. Výstupní hřídel (kotva) se otáčí vlivem změn magnetického pole.
V elektromotoru jsou dva póly stejného jména neustále umístěny proti sobě pomocí (obvykle) permanentních magnetů, nebo také elektromagnetů. Protože se stejnojmenné póly odpuzují, vzniká pohyb.
Stejnosměrný elektromotor s uhlíkovými kartáči:
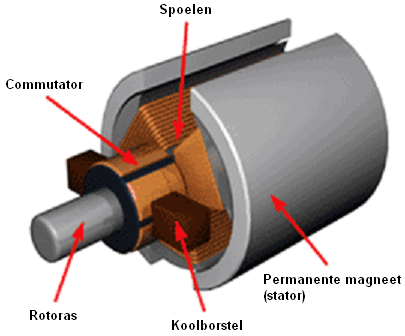
Téměř všechny elektromotory v automobilové technice jsou konstruovány jako stejnosměrné motory s permanentními magnety a uhlíkovými kartáči. V tomto typu elektromotorů najdeme následující magnety:
- Permanentní magnety (jeden severní pól a jeden jižní pól): mezi nimi je stacionární magnetické pole;
- Cívky: v tomto vzniká elektromagnetické pole. Rotující elektromagnetické pole je generováno v cívkách.
Permanentní magnety jsou umístěny vlevo a vpravo od rotoru a skládají se z jednoho severního a jednoho jižního pólu. Mezi tímto severním a jižním pólem je stacionární magnetické pole, které se nemění, když je elektromotor v provozu nebo stojí.
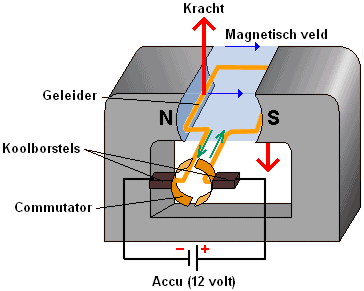
Jakmile jimi proteče proud, v cívkách se vytvoří rotující elektromagnetické pole. Proud je přiváděn a odváděn uhlíkovými kartáči přes komutátor.
Změna směru proudu se provádí komutací: dva uhlíkové kartáče se táhnou přes komutátor, který se skládá z plusové a mínusové strany. Uhlíkový kartáč na plusové straně vede proud do vodiče (zelené šipky na obrázku). Proud opouští vodič přes uhlíkový kartáč na záporné straně. Proud procházející vodičem vytváří elektromagnetické pole.
Mezi výsledným magnetismem v kotvě (vodič) a polem (permanentní magnety) (červené šipky na obrázku) vzniká síla. Tato síla způsobí, že se kotva a komutátor otáčí kolem své osy. Uhlíkové kartáče pak narazí na druhou část komutátoru a obrátí směr proudu v kotvě. Magnetické pole a síla jsou budovány ve stejném směru, takže kotva se opět otáčí kolem své osy.
Směr otáčení elektromotoru (čti: kotvy) můžeme změnit obrácením plus a mínus uhlíkových kartáčků.
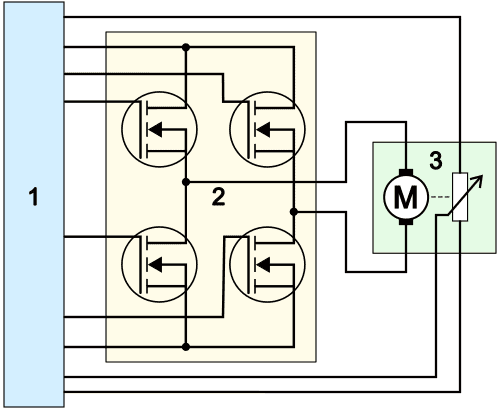
Výměnu plus a mínus lze dosáhnout pomocí H-můstku.
- ECU (1) současně ovládá dva ze čtyř tranzistorů nebo FET (4);
- FETy (2) dávají elektromotoru (3) plus a uzemnění. V závislosti na tom, které dva FETy jsou zapnuty, je horní uhlíkový kartáč kladný a spodní je broušený, nebo naopak;
- Potenciometr vedle elektromotoru registruje polohu a směr otáčení. Ne všechny elektromotory jsou vybaveny potenciometrem.
Podívejte se na stránku H-můstek pro možné návrhy a způsoby spínání H-můstku.
Stejnosměrný elektromotor bez uhlíkových kartáčů:
Bezkomutátorový stejnosměrný motor (DC) je synchronní motor. Elektrické ovládání nahradilo uhlíkové kartáče. Tento typ elektromotoru je velmi podobný synchronnímu střídavému motoru s permanentními magnety, jak se používá v hnací ústrojí elektrických vozidel. Hlavním rozdílem mezi oběma motory je ovládání: střídavý motor je řízen modulovaným sinusovým střídavým napětím a stejnosměrný motor pravoúhlým napětím.
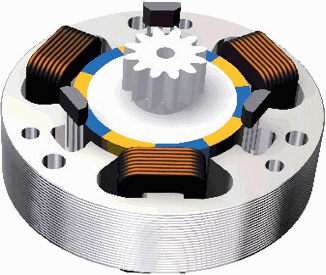
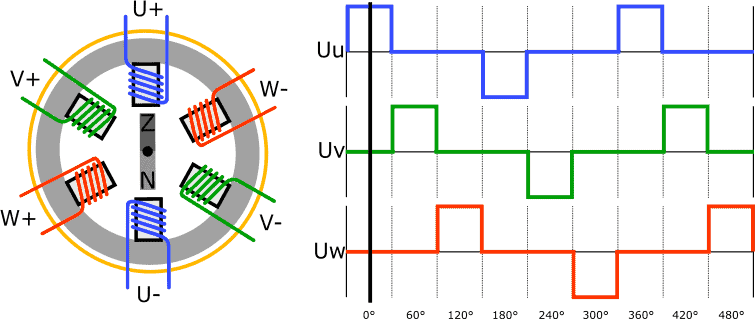
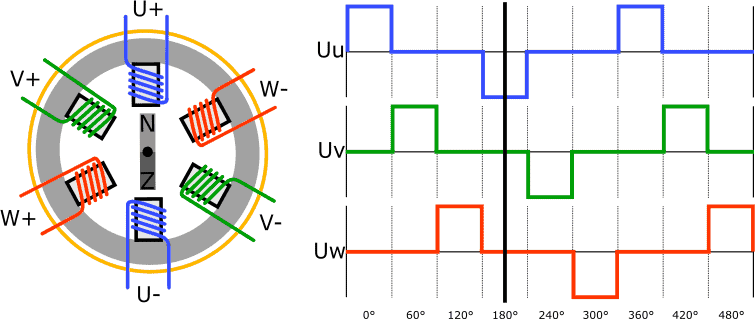
Stator často obsahuje tři nebo šest cívek (U, V a W) a rotor je permanentní magnet. Obrázek níže ukazuje schematickou strukturu stejnosměrného motoru s průběhem napětí přes tři cívky. Ve skutečnosti je mezi póly instalováno několik Hallových senzorů pro určení polohy rotoru.
Řídicí jednotka na základě polohy rotoru určuje, které cívky má ovládat.
Na následujícím obrázku je cívka U+ pod napětím. Způsob navinutí cívky kolem pólu určuje, zda se bude jednat o severní nebo jižní pól. V tomto příkladu je U+ severní pól a U- jižní pól.
Rotor je konstruován jako permanentní magnet. Jak je popsáno v předchozích odstavcích, rotor se polohuje nebo otáčí v důsledku měnícího se magnetického pole procházejícího cívkami.
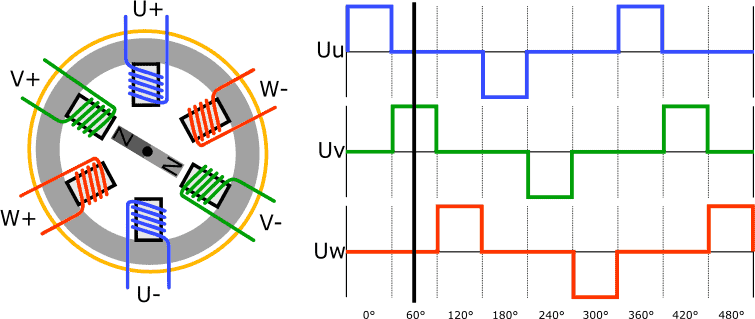
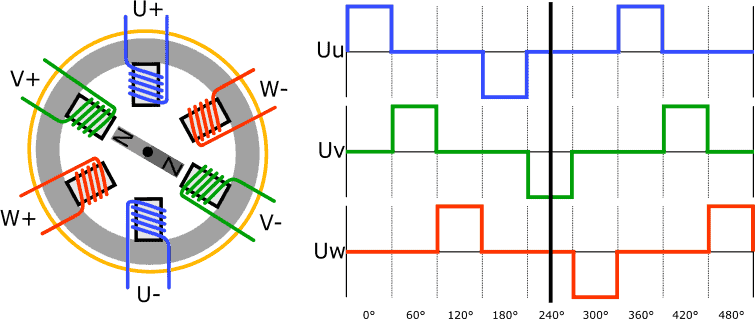
Pro otáčení rotoru proti směru hodinových ručiček z polohy znázorněné na předchozím obrázku jsou V-cívky napájeny.
V+ se stává severním pólem, V- jižním pólem. Rotor s permanentním magnetem se otáčí;
severní a jižní pól se navzájem přitahují, stejně jako jižní a severní pól na druhé straně magnetu.
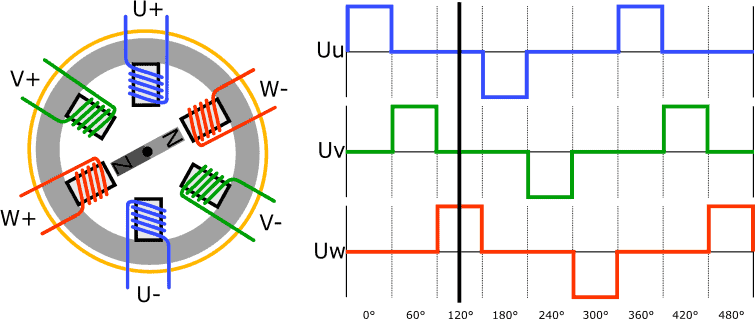
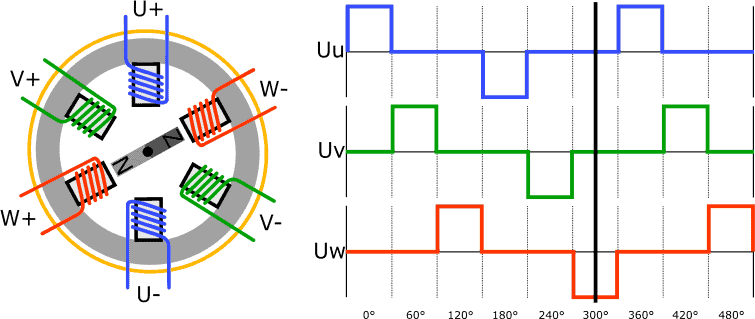
Nyní jsou W cívky pod napětím, aby se rotor otočil o dalších 60 stupňů.
Cívka W+ se stává severním pólem a W- jižním pólem. Rotor se otočí a zaujme svou novou polohu.
Rotor na dalším obrázku se od první situace otočil o 180 stupňů; na prvním snímku směřoval jižní pól vzhůru; teď je to severní pól.
Polarita U+ cívky a U-cívky je obrácená, což způsobí, že proud protéká cívkami obráceně. To dělá z U+ jižní pól a U- severní pól.
Rotor s permanentním magnetem se změnou magnetického pole dále otáčí.
Aby bylo možné rotor znovu otočit o 60 stupňů, je V- vyrobeno severním pólem a V+ jižním pólem. Rotor zaujme novou pozici.
Rotor se opět otočí o 60 stupňů v důsledku změny magnetického pole v cívkách:
W-cívka je severní pól a W+ je jižní pól.
V šesti výše popsaných situacích jsou dvě cívky neustále napájeny současně. Často také najdeme bezkomutátorové stejnosměrné motory se třemi cívkami místo šesti. Se třemi cívkami jsou také cívky U, V a W napájeny jedna po druhé, ale nedochází ke změně polarity.
Bezkomutátorový stejnosměrný motor je výkonný motor vhodný pro aplikace, kde je vyžadován vysoký točivý moment jak pro rozběh, tak pro střední i vysoké otáčky. Bezkomutátorový stejnosměrný motor a krokový motor jsou často zaměňovány. To není překvapivé, protože provoz a ovládání motorů má mnoho podobností: oba motory jsou poháněny vytvářením magnetického pole mezi cívkami a rotorem pomocí permanentních magnetů. Oba motory se však kromě terminologie výrazně liší především v použití, a tedy i ve volbě materiálů.
Krokový motor je v podstatě bezkomutátorový stejnosměrný motor, ale používá se v jiném oboru. Zatímco stejnosměrný motor se používá hlavně pro dlouhodobý provoz při vysokých rychlostech, krokový motor vidíme v aplikacích, kde je nejdůležitější nastavení přesné polohy.
Zobrazený stejnosměrný motor je řízen při každém otočení rotoru o 60°. To by se mohlo případně snížit na 30°, kdybychom mezi každým ovladačem současně napájeli čtyři cívky, čímž bychom získali mezipolohu. Krokový motor je však schopen nastavit přírůstky od 1,8° do 0,9°. To dále ukazuje, že krokový motor je vhodný pro velmi přesné polohy.
Různé verze, způsoby ovládání pomocí ECU a aplikace naleznete na stránce krokový motor.

Související stránky: