Предмети:
- въведение
- Принцип на работа на електродвигателите
- DC електрически мотор с въглеродни четки
- DC електрически мотор без въглеродни четки
Предговор:
Електродвигатели намираме на все повече места в колата. В електрическия двигател електрическият ток се преобразува в движение и топлина. Откриваме електрически мотор в огледалото и регулирането на седалките, но също и като двигател за чистачки на предното стъкло на механизма за чистачки или като стартер. Тези електродвигатели работят при напрежение от 12 до 14 волта. На тази страница се ограничаваме до електродвигателите в интериора и екстериора.
Електрическите двигатели също осигуряват (частично) електрическо задвижване в хибридни и изцяло електрически превозни средства. Този тип електродвигател е разгледан на страницата: ВН електродвигатели.
Можем да разделим постояннотоковите електродвигатели на:
- Електрически двигател с въглеродни четки (електромагнитно поле и арматура)
- Серия електродвигатели;
- Паралелни електродвигатели;
- Безчеткови електродвигатели.
Принцип на работа на електродвигателите:
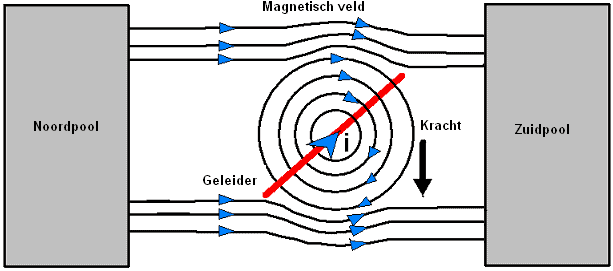
В електрически двигател електрическият ток се преобразува във въртеливо движение. Движението се причинява от два магнитни полюса, които се привличат или отблъскват един друг:
- Северният и южният полюс се привличат взаимно;
- Два северни полюса се отблъскват;
- Два южни полюса се отблъскват.
Магнитът има северен и южен полюс с противоположни заряди. Когато този магнит се счупи наполовина, вие изведнъж нямате два отделни полюса, а два нови магнита, и двата със северен и южен полюс.
Множество магнитни полюси (северен и южен) са фиксирани към корпуса. Между северния и южния полюс има магнитно поле. Изходният вал (котвата) се върти поради промени в магнитното поле.
В един електродвигател два едноименни полюса са постоянно разположени един срещу друг, използвайки (обикновено) постоянни магнити или електромагнити. Тъй като едноименните полюси се отблъскват, се създава движение.
DC електродвигател с въглеродни четки:
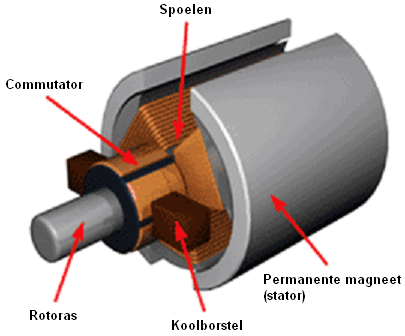
Почти всички електрически двигатели в автомобилната технология са проектирани като постояннотокови двигатели с постоянни магнити и въглеродни четки. В този тип електродвигатели намираме следните магнити:
- Постоянни магнити (един северен полюс и един южен полюс): между тях има стационарно магнитно поле;
- Намотки: в тях се генерира електромагнитно поле. В намотките се генерира въртящо се електромагнитно поле.
Постоянните магнити са разположени отляво и отдясно на ротора и се състоят от един северен полюс и един южен полюс. Между този северен и южен полюс има стационарно магнитно поле, което не се променя, когато електродвигателят работи или е неподвижен.
Въртящо се електромагнитно поле се генерира в намотките веднага щом през тях тече ток. Токът се подава и отвежда от въгленовите четки през комутатора.
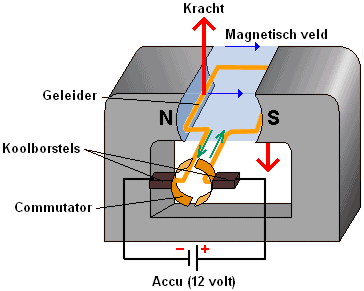
Обръщането на посоката на тока се извършва чрез комутация: две въглеродни четки се плъзгат над комутатора, който се състои от плюс и минус страна. Въглеродната четка от плюсовата страна пренася тока към проводника (зелени стрелки на фигурата). Токът напуска проводника през въглеродната четка от отрицателната страна. Токът, протичащ през проводника, създава електромагнитно поле.
Създава се сила между получения магнетизъм в арматурата (проводника) и полето (постоянните магнити) (червени стрелки на изображението). Тази сила кара арматурата и комутатора да се въртят около оста си. След това въглеродните четки удрят другата част на комутатора, обръщайки посоката на тока в арматурата. Магнитното поле и силата се изграждат в една и съща посока, така че арматурата отново се върти около оста си.
Можем да променим посоката на въртене на електродвигателя (да се чете: арматурата) като разменим плюса и минуса на въглеродните четки.
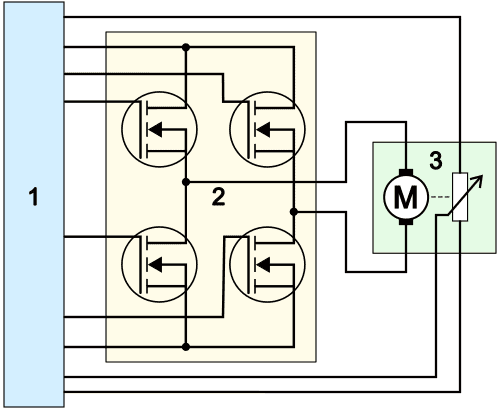
Размяната на плюс и минус може да се постигне с помощта на H-мост.
- ECU (1) управлява едновременно два от четирите транзистора или FETs (4);
- FETs (2) дават на електрическия мотор (3) плюс и маса. В зависимост от това кои два FETs са включени, горната въглеродна четка е положителна, а долната е шлифована, или обратното;
- Потенциометърът до електродвигателя регистрира позицията и посоката на въртене. Не всички електродвигатели са оборудвани с потенциометър.
Вижте страницата H-мост за възможните дизайни и методи на превключване на H-моста.
DC електрически мотор без въглеродни четки:
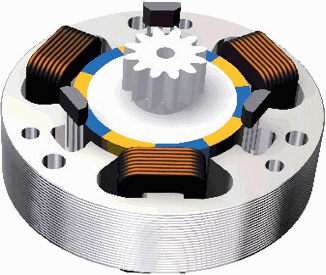
Безчетковият двигател с постоянен ток (DC) е синхронен двигател. Електрическото управление е заменило въгленовите четки. Този тип електродвигател е много подобен на синхронния AC двигател с постоянни магнити, както се използва в задвижване на електрически превозни средства. Основната разлика между двата двигателя е управлението: AC моторът се управлява с модулирано синусоидално променливо напрежение, а DC моторът с правоъгълно напрежение.
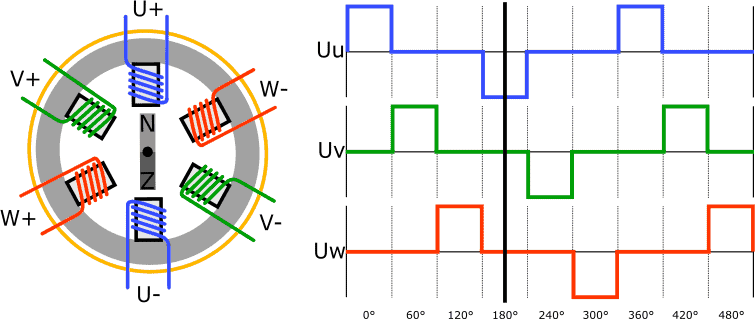
Статорът често съдържа три или шест намотки (U, V и W), а роторът е постоянен магнит. Изображението по-долу показва схематичната структура на DC двигателя с прогресията на напрежението през трите намотки. В действителност няколко сензора на Хол са инсталирани между полюсите, за да се определи позицията на ротора.
Блокът за управление определя кои бобини трябва да управлява въз основа на позицията на ротора.
На следващото изображение бобината U+ е под напрежение. Начинът, по който бобината е навита около полюса, определя дали ще бъде северен или южен полюс. В този пример U+ е северният полюс, а U- е южният полюс.
Роторът е проектиран като постоянен магнит. Както е описано в предишните параграфи, роторът се позиционира или завърта в резултат на променящо се магнитно поле през намотките.
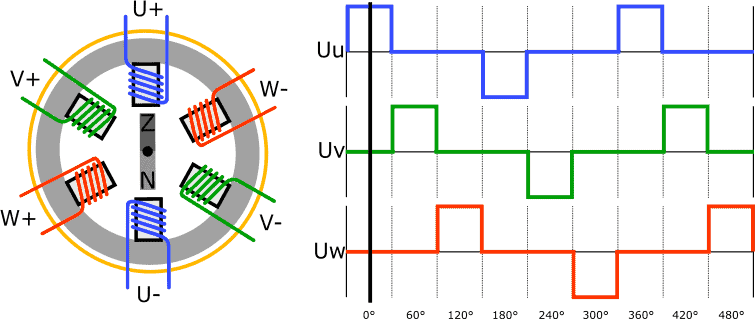
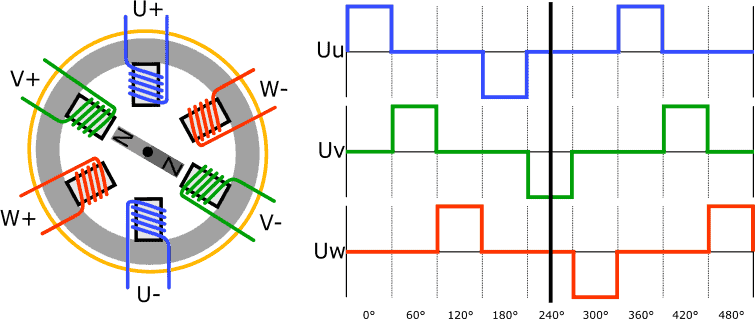
За да завъртите ротора обратно на часовниковата стрелка от позицията, показана на предишната фигура, V-намотките се захранват.
V+ става северният полюс, V- южният полюс. Роторът с постоянен магнит се върти;
северният и южният полюс се привличат, както и южният и северният полюс от другата страна на магнита.
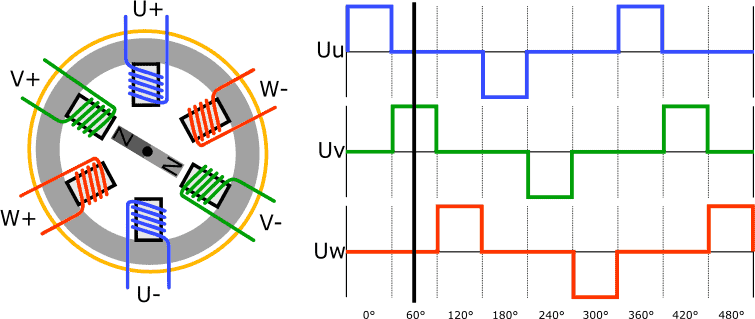
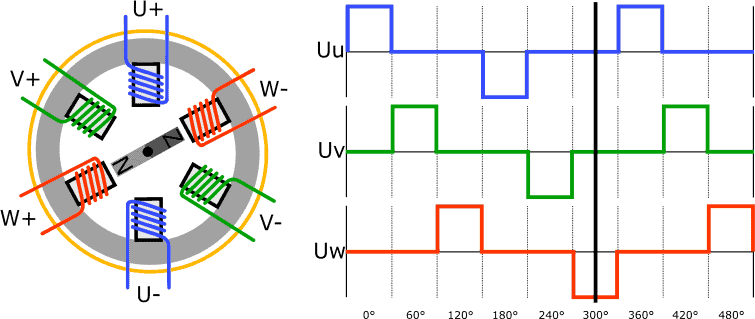
Сега W намотките се захранват, за да завъртят ротора на още 60 градуса.
Бобината W+ се превръща в северен полюс, а W- в южен полюс. Роторът се завърта и заема новата си позиция.
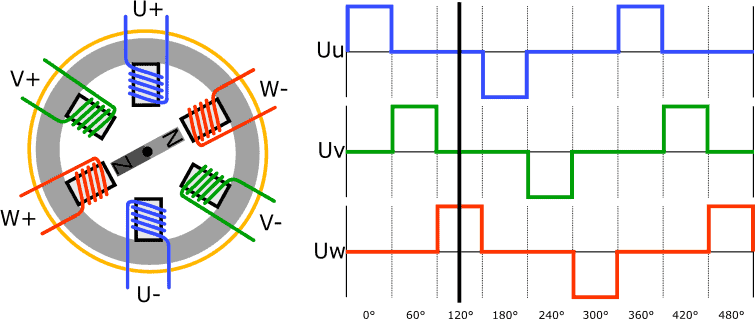
Роторът в следващото изображение се е завъртял на 180 градуса от първата ситуация; в първото изображение южният полюс сочи нагоре; сега това е Северният полюс.
Полярността на бобината U+ и бобината U- е обърната, което кара тока да протича през бобините в обратна посока. Това прави U+ южен полюс, а U- северен полюс.
Роторът с постоянен магнит се завърта допълнително от промяната в магнитното поле.
За да завъртите отново ротора на 60 градуса, V- се прави северен полюс, а V+ - южен полюс. Роторът заема новата позиция.
Още веднъж роторът се завърта на 60 градуса в резултат на промяна в магнитното поле в намотките:
W-намотката е северният полюс, а W+ е южният полюс.
В шестте ситуации, описани по-горе, две бобини са постоянно захранвани едновременно. Също така често намираме безчеткови DC двигатели с три бобини вместо шест. При три намотки U, V и W намотките също се захранват една след друга, но няма промяна в полярността.
Безчетковият DC двигател е мощен двигател, подходящ за приложения, където се изисква висок въртящ момент както за стартиране, средна скорост, така и висока скорост. Безчетковият постояннотоков двигател и стъпковият двигател често се бъркат. Това не е изненадващо, тъй като работата и управлението на двигателите имат много прилики: и двата двигателя се задвижват чрез създаване на магнитно поле между намотките и ротора с постоянни магнити. И все пак, в допълнение към терминологията, двата двигателя имат значителни разлики, главно в приложението и следователно в избора на материали.
Стъпковият двигател е основно безчетков DC двигател, но се прилага в различна област. Докато DC моторът се използва главно за продължителна работа при високи скорости, ние виждаме стъпковия двигател в приложения, където настройката в точна позиция е най-важна.
Показаният DC двигател се управлява на всеки 60° завъртане на ротора. Това би могло евентуално да се намали до 30°, ако активираме четири намотки едновременно между всяко управление, като по този начин получим междинна позиция. Стъпковият двигател обаче може да регулира стъпки от 1,8° до 0,9°. Това допълнително показва, че стъпковият двигател е подходящ за много точни позиции.
Различните версии, методите за управление от ECU и приложенията можете да намерите на страницата стъпков мотор.
