科目:
- 車輪導引的自由度
- 車輪導軌中的鉸鏈
- 輪導軌中的導軌
- 計算自由度
車輪導引的自由度:
汽車的懸吊包含許多鉸鏈(包括叉骨和減震器上的鉸鏈),它們提供整個懸吊的自由度。 輪引導確保可能的輪運動的可能自由度僅限於一或兩個。 如果輪子沒有“固定”,它將能夠自由旋轉、傾斜(沿 x 和 y 方向)、轉動、上下移動。 原則上,車輪從懸吊上「鬆開」。 它可以在沒有“引導”的情況下向任何方向移動。 剛才提到的每個運動都是一個自由度。
車輪懸吊,即車輪引導,確保運動自由度限制為 1 個自由度。 這意味著車輪只能在一個方向上「自由」移動,而不受駕駛員的影響。 這種自由運動是壓縮和回彈的上下運動。 車輪可以在不平坦的路面上不受阻礙地進出。
汽車的車輪懸吊由許多線鉸鏈、球接頭和旋轉滑動鉸鏈構成。 這些鉸鏈都會互相影響。 太多的鉸鏈會產生過多的自由度(因此輪子可能會無意中沿著不同方向移動)或 0 自由度(輪子無法移動,因此無法壓縮和壓縮)。
車輪導軌中的鉸鏈:
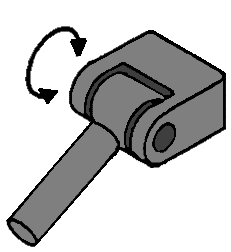
線鉸鏈:
此線鉸鏈可沿 1 個方向移動; 上和下。 這提供了 1 個自由度。
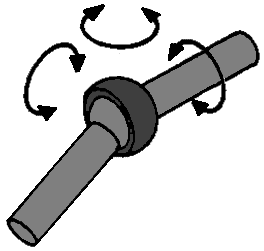
球接頭:
透過此鉸鏈,相關零件可進行 3 種相對運動; 點頭、滾動和轉動的動作。 這個鉸鏈有3個自由度,因為當鉸鏈「鬆動」時,它可以進行3個自由運動(見箭頭)。
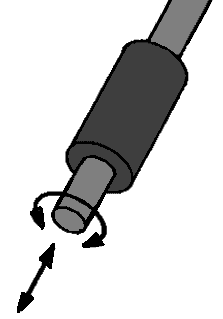
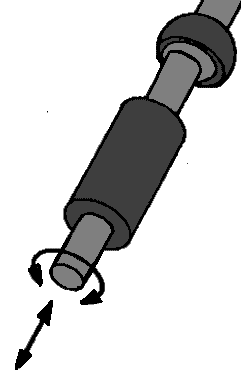
旋轉滑動鉸鏈:
此鉸鏈可進行 2 種運動; 旋轉和進出滑動運動。 原則上,這是減震器的範例(來自麥花臣支柱)。 這2個動作保證了旋轉滑動鉸鏈有2個自由度。
滾輪導軌中的導軌:
為了使用各種類型的鉸鏈來創建車輪懸架,有時必須將鉸鏈組合在一個物體上,例如叉骨。 我們稱這個支撐臂為導向臂。 以下是這些導體的一些範例:
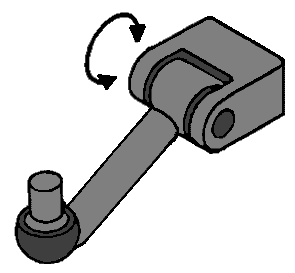
帶有球形接頭的線鉸鏈:
這是叉骨的典型範例,其線上鉸鏈側連接到車身(或副車架),並在球窩接頭側連接到轉向節。 當這整個鉸鏈鬆動時,它可以在線鉸鏈的移動方向(1方向)和球接頭的3方向上移動。 畢竟,線鉸鏈有 1 個自由度,而球接頭有 3 個自由度。由於該部件被視為 1 個導體,因此可以將自由度加在一起。 1 和 3 使其具有 4 個自由度。
雙球節:
具有雙球接頭的導向裝置的一個例子是具有內拉桿球和外拉桿球的拉桿。 每個球形接頭有 3 個自由度,因此由於它是 1 個導體,因此應將它們加在一起。 然而,它們具有相同的自旋轉能力,因為如果一個球窩進行旋轉運動,那麼另一個球窩也會做旋轉運動。 因此 1 個自旋轉自由度不算在內(參見紅色箭頭)。 此導體的自由度總共為 1,但在接下來的計算中,在「自旋轉 r」下輸入數字 6。 然後在計算中減去這個 1。
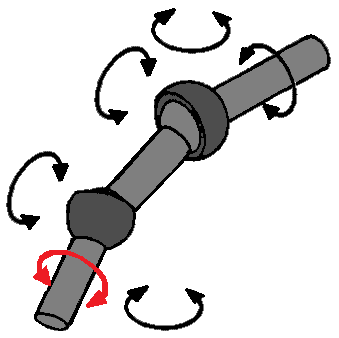
帶有球形接頭的旋轉滑動鉸鏈:
如前所述,避震器是一種旋轉滑動鉸鏈。 然而,每個麥花臣支柱上方都有一個球形接頭,儘管您一開始不會這麼認為。 減震器頂部還有另一個橡膠。 這種橡膠為減震器提供了一定的運動自由度,因此也具有球窩接頭的特性。 因此,避震器同時具有旋轉滑動鉸鏈的 2 個自由度和球窩接頭的 3 個自由度,總共為 5 個自由度。 這裡也存在自然旋轉,因為旋轉滑動鉸鏈的旋轉運動與球接頭的旋轉運動是相同的運動。 所以自轉的「r」必須加1。
計算自由度:
可以根據懸吊資料計算自由度。 為了正確完成公式,鉸鍊和導軌必須分為幾類:
- L為導體數量
- g 代表關節和鉸鏈的數量
- r 為自然旋轉數(與 1 個導軌中的雙球窩接頭相同)
此外,字母:
- k 為輪架數量(大多數情況下為 1,因為這是轉向節)
- εfi 為關節和鉸鏈總數加在一起的自由度數。
F = 6 (k + L – g) -r + εfi
示例:
車輪懸吊包含:k 1 輪架(轉向節)、L 2 導軌、g 5 關節、r 2 自旋轉、εfi 15 總自由度
以公式形式表示為:
F = 6 (1 + 2 – 5) – 2 + 15
F = 6 x (-2) – 2 + 15
F = 1
所以現在有 1 個自由度,所以這很好。 輪子可以做純粹的上下運動。
為了澄清這一點,這裡有一個帶有車輪懸吊圖片的範例:
下圖是對應圖例的麥花臣支柱。 字母 A、B 和 C 代表導軌,數字 1 至 6 代表鉸鏈/接頭。
εfi 是鉸鏈自由度之和; 因此每個球接頭有 3 個自由度(即 4 x 3),線鉸鏈有 1 個自由度,旋轉滑動鉸鏈有 2 個自由度。
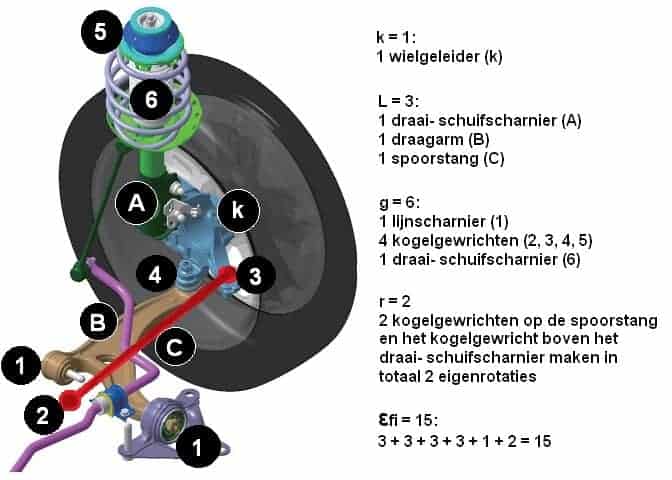
公式可以這樣完成:
F = 6 (k + L – g) -r + εfi
F = 6 (1 + 3 – 6) – 2 + 15
F = 6 x (-2) – 2 + 15
F = -12 – 2 + 15
F = -14 + 15
F= 1個自由度