話題:
- 驅動程式錯誤
當閱讀上述頁面時,會清楚地看到左前輪和右前輪都有不同的轉向角落。 所以轉向錯誤幾乎總是會發生。 轉向誤差意味著兩個輸入的角度不相等,因此一個車輪比另一個車輪滑移更多。 只有一種情況不會發生轉向錯誤。 這是在以較小的轉向角度(最多約 10 度)轉彎時發生的情況(見圖)。
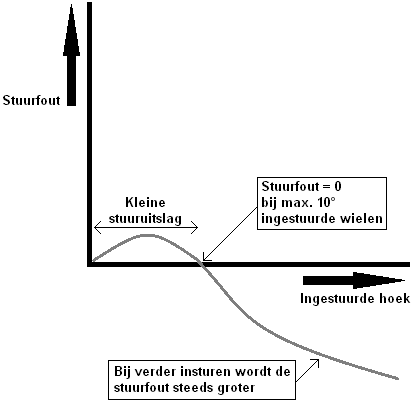
圖中的X軸表示轉向角,Y軸表示轉向誤差。 在左側轉角處(即 X = 0 處),您向前直行。 「小轉向角」下方的線沿著 X 軸正向延伸。 此線表示最大轉向角為10度時的轉向誤差為0。 因此,最大轉向角度為 10 度時,不會出現轉向誤差。 這樣前輪就不會打滑。 這是故意這樣構造的,因為高速行駛時(例如在高速公路上)轉向角通常在 10 度左右。 高速行駛時,前輪不打滑,最大轉向角度為10度,抓地力最大。 隨著進一步轉向,轉向誤差變得更大。 原則上這不是問題,因為這通常是在城市中,速度較低。 在較低速度下,轉向誤差的影響小於在較高速率下的影響。