科目:
- 一般
- 擋風玻璃刮水器馬達零件
- 連接雨刷電機
- 擋風玻璃刮水器馬達加開關
- 從理論到製造商的方案
- 兩速雨刷電機
- LIN總線控制的雨刷電機
整體:
後雨刷馬達安裝在汽車的尾門內。 車窗或後擋板金屬板上有一個孔,雨刷馬達軸可從該孔伸出。 帶有雨刷片的雨刷臂安裝在該軸上。 軸顯然不能完全旋轉,因為這樣不僅後窗,而且後擋板或後保險桿的其餘部分都會被擋風玻璃雨刷片擦拭乾淨。 這就是為什麼馬達中有一個機構可以確保軸最多可以移動 180 度。

後雨刷馬達始終只有一種速度。 雨刷開關可以打開和關閉,通常有一個間隔; 接通電源後,每隔幾秒鐘就會控制一次馬達。
關閉後擋風玻璃雨刷始終會返回其初始位置。 如果這種情況不發生,當開關設定到「關閉」位置時,雨刷臂將停在車窗的中間。 馬達的電源不會被切斷,而是保持開啟狀態,直到達到零點。
擋風玻璃刮水器馬達零件:
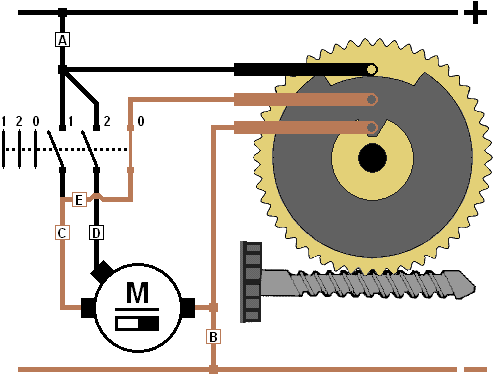
為了讓擋風玻璃刮水器臂移回其起始位置,它包含一個帶有滑動觸點的內部接觸板。 下圖解釋了雨刷馬達的工作原理。
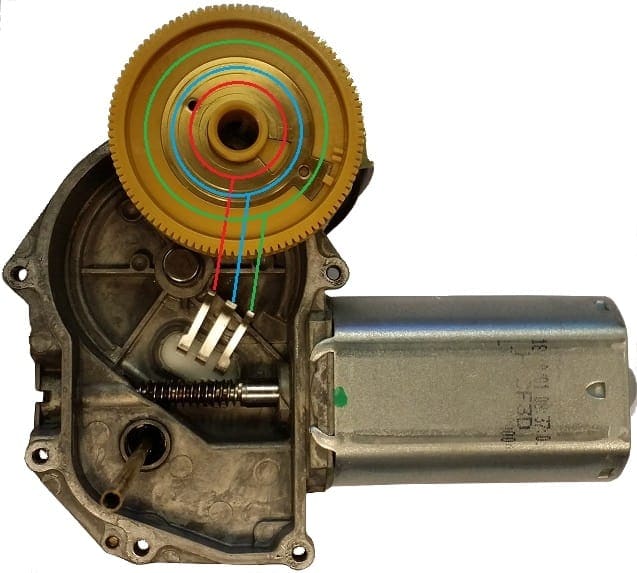
擋風玻璃刮水器馬達的背板已被拆除。 紅色箭頭表示背板機構的圓形凸輪前後移動的位置。 該機構確保黃色塑膠齒輪的旋轉運動轉換為輸出軸的前後運動。 圖中輸出軸是直立的。 擋風玻璃刮水器臂安裝在該軸上。

右圖顯示了帶有蝸輪和塑膠齒輪的剖面雨刮器馬達。 此處該機構已拆解。

以下文字與下圖相關。 黃色塑膠齒輪現在已翻轉。 導電接觸盤的凹口和凹槽在這裡清晰可見。 紅色、藍色和綠色表示滑動接點接觸接觸盤的位置。
為了深入了解滑動觸點與導電接觸板接觸的位置,這些位置以紅色、藍色和綠色表示。 以下是滑動觸點的用途:
魯德: 當點火開關開啟時,該電壓始終顯示 12 伏特。
布勞: 此滑動觸點負責零位。
格羅恩: 這就是品質。 馬達在零位連接至此。
當引擎運轉時,三個滑動觸點「拖曳」在金色接觸板上。 接觸板上有一個凹口和一個凹槽。 因此,滑動觸點絕對不會同時接觸接觸盤。 中間的一個(以藍色表示)負責移動到零位置。 接觸板具有導電性; 如果馬達尚未處於初始位置,則內部(紅色)和中間(藍色)滑動觸點相互連接。 電壓透過接觸板從紅色觸點傳輸到藍色觸點。 這允許馬達繼續運行,直到紅色滑動觸點到達凹口。 此時它就無法再向藍色的傳輸電壓了。 馬達的控制已停止。
同時,外部滑動觸點透過接觸板透過凹槽(以綠色表示)與藍色滑動觸點接觸。 綠色滑動觸點連接到車輛的地面。 這種滑動接觸起到一種煞車的作用。 這會使擋風玻璃刮水器馬達停止運轉。 質量通過綠色傳遞到藍色。 馬達兩側均接地短路,因此保持在零位。
連接雨刷馬達:
為了連接擋風玻璃刮水器馬達的接線,必須研究接觸板和滑動觸點等的操作。 只有當您了解哪些點會出現電壓時,您才能繼續測量和連接接線。
後擋板中後雨刷馬達的線束通常由三條或四根電線組成。 必須在這些線上測量恆定電壓、開關電壓和接地。 當馬達處於靜止位置時,未測量任何內容的剩餘電線通常具有電源電壓(在接地馬達的情況下)或正極(在正極開關馬達的情況下)。 只有當所有電線均已連接且雨刷馬達處於起始位置時,才能對該電線進行測量。 在所有其他情況下,不進行任何測量。
擋風玻璃刮水器馬達有正極連接和接地連接。 這意味著開關位於電動馬達的正極側或接地側。 在測量之前了解這一點非常重要。 以下章節詳細描述了每個步驟。 密切注意正版和地面版之間的差異!
雨刷馬達正極:
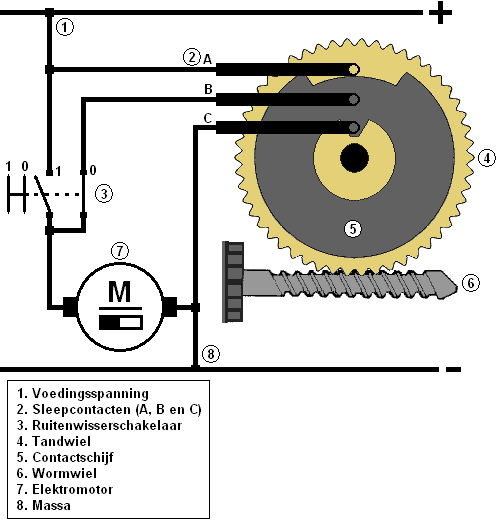
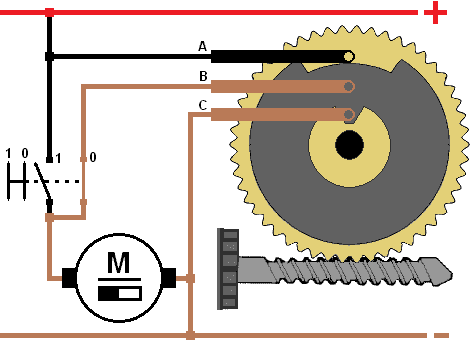
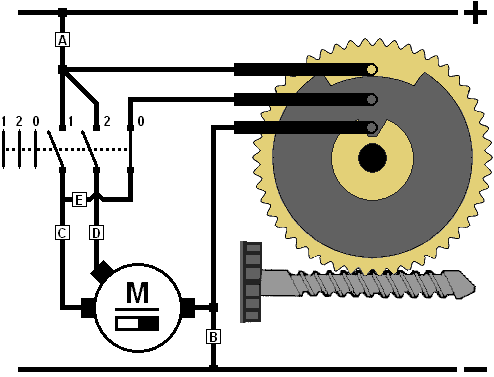
這些圖表還可以用來確定如何將其與實踐考試的臭名昭著的部分聯繫起來。 下面是帶有加號開關後雨刷馬達圖例的圖表。 雨刷馬達停止,開關「0」閉合。
電動馬達(7)僅以恆定速度接收直流電池電壓。 在這種情況下,開關 1 閉合,開關 0 斷開。 電動馬達 (7) 驅動蝸輪 (6),蝸輪 (4) 進而帶動齒輪 (5) 旋轉。 灰色導電接觸盤連接到塑膠齒輪,因此也會旋轉。 當擋風玻璃雨刷開關設定到關閉位置時,接觸盤 (2) 和滑動觸點 A、B 和 C (XNUMX) 確保引擎在正確位置停止。 下面對此進行了澄清。
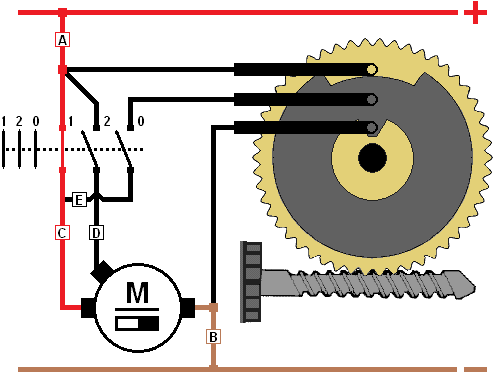
擋風玻璃刮水器馬達開啟:
在這種情況下,雨刷馬達打開。 電源電壓透過紅色正極線提供。 開關 1 閉合,為馬達提供恆定的電源電壓。 引擎的另一側接地,因此引擎將以恆定速度旋轉。 蝸輪由擋風玻璃刮水器馬達驅動,因此會旋轉。 在這種情況下,這對馬達的供電電壓沒有影響。
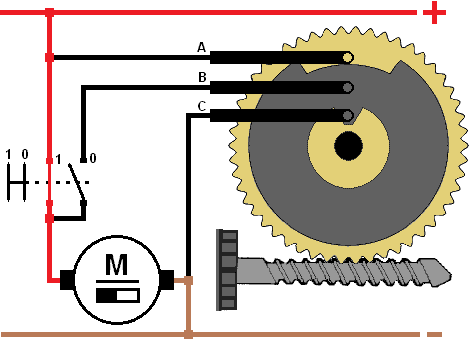
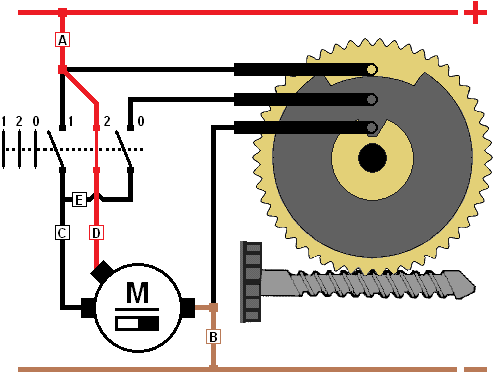
開關處於關閉位置,擋風玻璃雨刷仍在移動:
在下圖中,擋風玻璃雨刷開關設定為「關閉」位置。 這表示開關 1 打開,開關 0(從零位置)關閉。 此時,電流經滑動觸點A,經灰色接觸片流向滑動觸點B。電流再從滑動觸點B,經開關0流至雨刷馬達。 由於齒輪是由雨刷馬達透過蝸輪驅動的,因此接觸板也會旋轉。 直到接觸板的凹口回到頂部,馬達將繼續運轉。
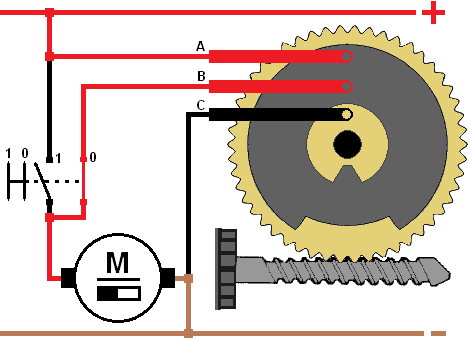
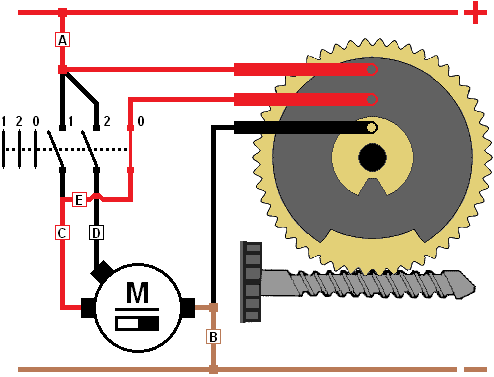
開關處於關閉位置; 擋風玻璃雨刷停止:
齒輪繼續旋轉,直到接觸板的槽口位於頂部。 這會中斷滑動觸點 A 和 B 之間的接觸。 雨刷觸點 A 通過(黃色)塑膠齒輪絕緣,因此不再有電流流向滑動觸點 B。因此,不再有任何電流流向雨刷馬達。 當接觸板旋轉得夠遠時,滑動觸點C也與接觸板的小導電部分接觸。 此時滑動觸點B和C相互連接。 由於 C 始終接地,因此 B 現在也透過接觸板與地面接觸。 擋風玻璃刮水器馬達目前兩側均接地,因此它會立即停止。 所以這其實就起到了一種煞車的作用。 這樣雨刷馬達總是停在同一個地方。
卡通:
動畫清楚地顯示了開關和接觸板的不同位置。 這是上面給出的解釋的簡要總結。
- 關閉:開關處於零位置,電動馬達與正極和接地短路。
- 打開,恆速:開關位於位置 1,接觸板順時針旋轉兩圈。 在此位置不使用接觸板。
- 開關位置0,轉至零位置:接觸盤提供馬達電源,直到槽口到達滑動觸點。
- AB(加上中斷)、BC 建立聯繫。 這會對引擎產生煞車作用,然後引擎幾乎立即停止。

例如,當在實踐考試期間需要連接佈線時,必須找到正確的開關位置。 透過雨刷馬達的圖表,您可以看出插頭中的哪個引腳負責電源、接地或零位置。 透過測量汽車線束中哪根電線的電壓為 12 伏特,就可以將其連接起來。 使用電阻測量可以確定哪個連接是接地的。 歐姆表將指示該連接處的電阻值小於 1 歐姆。 當然,負極線必須固定在車身上良好的接地點上。 然後將開關移動到多個位置,您就可以找到哪根線屬於開關的哪個位置。 然後可以使用該圖來確定哪些電線應相互連接。
從理論到廠商方案:
上一節討論了後雨刷馬達的原理。 此圖清楚地顯示了剖面雨刷馬達中的接觸板如何確保馬達接收電壓以旋轉回起始位置。 本節介紹如何將該圖轉換為製造商的圖。
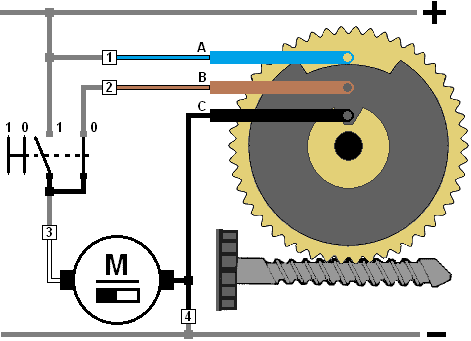
以下 電氣圖 基於現代 Getz 的後雨刷馬達。 電線顏色(藍色、棕色、白色和黑色)與汽車的顏色相對應。
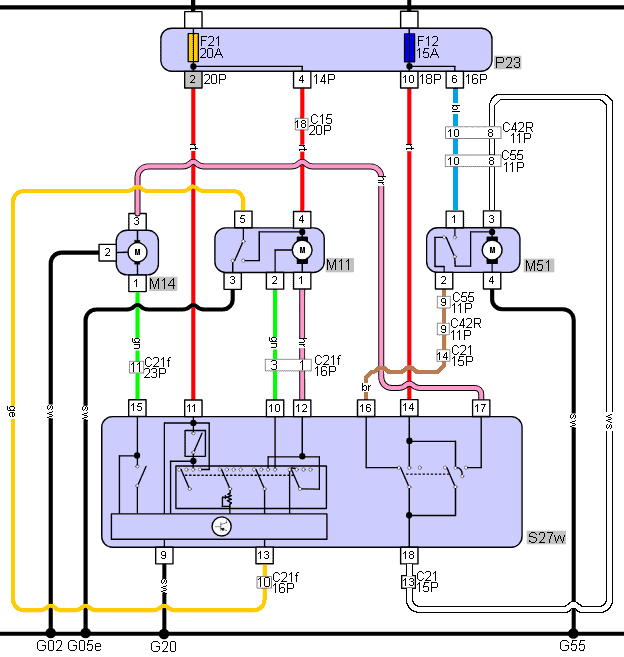
右圖和下圖中的數字 1 至 4 顯示了將擋風玻璃刮水器馬達連接到汽車線束的連接器的引腳。 兩個圖中的數字和電線顏色相符。 下圖取自 HGS-data.com。 後雨刷馬達的零件代碼:M51。
在這兩個圖中,您可以看到藍色線(插頭中的引腳 1)是保險絲的恆定正極線。 棕色線(針腳 2)負責返回零位。 下圖顯示了作為機械開關的接觸板。 開關的正極線連接到白線(接腳 3)。 黑線是接地線(接腳4),連接到機身上的接地點(G55)。
在靜止位置,電動馬達對地短路; 白色和棕色電線透過接觸盤相互連接。
二速雨刷馬達:
到目前為止,僅討論了單速雨刷馬達。 這適用於後窗。 擋風玻璃刮水器馬達通常可以以兩種不同的速度運行,即用於間歇(開關的第一個位置)和連續刮水(第二位置)的正常速度和高速(第三位置)。 因此,在擋風玻璃刮水器開關的第二位置和第三位置之間存在電動馬達旋轉的速度差。 這是透過使用多個碳刷來實現的。 一速雨刷馬達有兩個碳刷,二速雨刷馬達有三個。 右圖顯示了單速和雙速雨刷馬達的符號。
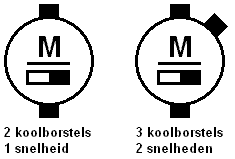
速度越高,導通的電樞繞組就越少。 現在,透過旋轉電樞產生的反電壓更小。 由於產生的反電壓較少,電樞以及最終整個電動馬達都會以更高的速度運轉。
兩速雨刷馬達圖與上面討論的非常相似。 擋風玻璃刮水器馬達在此再次開啟。
現在可以看到開關的三個位置。
– 位置 1:低速、恆定旋轉。
– 位置 2:高速、恆定旋轉。
– 位置 0:關閉,回到起始位置(零位置)。
在右圖中,第一個位置已啟用。 這是低速。
此處啟用模式 2。 現在馬達透過另一個碳刷獲得正值。 現在電動馬達中的反電壓較低,導致速度比連接另一個碳刷時更高。
在此時間表中,選擇位置 0。 馬達關閉,但首先返回起始位置。 接觸板連接滑動觸點A和B,使雨刷馬達仍具有供電電壓。 當觸板進一步旋轉180度時,滑動觸點A、B間的接觸中斷,導致供電電壓失效。
接觸板和滑動觸點的操作與 1 速雨刷馬達相同。
在這種情況下,接觸板再次旋轉,使得滑動觸點B和C現在彼此接觸。 馬達現已兩側接地。 雨刷馬達保持在該位置,直到再次打開。
LIN 總線控制的雨刷馬達:
前面提到的系統使用擋風玻璃雨刷開關的電壓控制。 現代汽車越來越多地透過 LIN 總線進行控制。 控制單元控制擋風玻璃刮水器馬達。 來自開關 (S) 和雨/光感知器 (RLS) 的多個輸入向 ECU 提供訊號,以開啟擋風玻璃刮水器馬達 (RWM)、以不同的速度刮水或關閉。
此圖顯示了控制擋風玻璃刮水器馬達的組件。
開關 (S) 透過三根綠線連接到 ECU。 開關的位置透過這些電線傳輸。
因此,與傳統控制的情況一樣,開關沒有直接連接到 RWM。 RLS 從 ECU 接收電源(12 伏特),透過接地點接地,並透過 LIN 匯流排將訊號傳送到其他連接的組件。 RWM 由 LIN 總線上的訊號控制。 RWM 中的控制裝置(可透過電晶體符號識別)確保對電動馬達的實際控制。

在傳統的擋風玻璃刮水器馬達中,導電接觸板的位置導致移動到零位置。 對於 LIN 總線控制的雨刷電機,該接觸板已被位置盤和霍爾感測器取代。 定位盤的位置取決於塑膠齒輪的位置,因此也取決於雨刷臂的位置。 位置盤分為多個北極和南極(N 代表北,S 代表南)。 由於定位盤上的北極和南極的尺寸不同,RWM 中的控制單元可以使用霍爾感測器確定齒輪的準確位置。 當RLS或開關結束對雨刷馬達的控制時,RWM中的控制單元控制電機,直到定位盤到達「零位置」。
這種控制的優點是:
- PWM控制使得可以運行不同的速度。
- 電動機旋轉方向可反轉; 順時針轉動時,雨刷臂會向上移動;逆時針轉動時,雨刷臂會向下移動。 這使得擋風玻璃雨刷機構的安裝空間更小。
- 零位可能會有所不同; 有時,稍微向上移動雨刷片,雨刷片的橡膠就會朝另一個方向傾斜。 擋風玻璃刮水片並不總是佔據擋風玻璃上的相同位置。 這對雨刷片的使用壽命有正面的影響。
LIN總線訊號可以用示波器測量。 所示範圍影像是 ECU(主站)與雨/光感知器和雨刷馬達(從站)之間的通訊。

在頁面上 林總線 描述了 LIN 總線訊息的結構。 還詳細描述了擋風玻璃刮水器系統的通信,並解釋如何識別 LIN 總線訊號中的故障。