科目:
- 確定並安裝引擎管理系統的傳感器
- 曲軸位置感知器
- 脈衝輪
- 地圖感測器
- 冷卻液溫度感知器
- 氧氣感知器
確定並安裝引擎管理系統的傳感器:
引擎管理系統需要許多感知器。 感測器充當系統的“輸入”。 感測器將物理量轉換為可由電腦(在本例中為 MegaSquirt)處理的電訊號。
MegaSquirt 的組裝過程必須考慮安裝在引擎上的組件,因為 MegaSquirt 的結構可能有所不同。
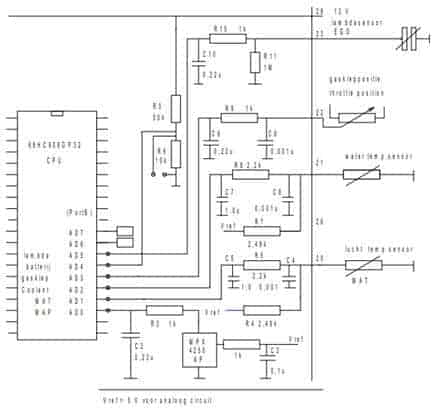
此圖顯示了這些組件所在的不同感測器電路。 圖中所示的輸入訊號來自氧感知器、節氣門位置感知器、冷卻液溫度感知器和空氣溫度感知器。
除了感測器之外,該圖中還包含許多電阻器和電容器。 這些成分的組合形成過濾器; 這些濾波器用於捕獲幹擾訊號和雜訊。 如果感測器訊號因雜訊而失真,這可能會對執行器的控制產生重大影響,也會對馬達的運作產生重大影響。
曲軸位置感知器:
引擎管理系統的一個重要輸入是曲軸轉速。
使用曲軸位置感知器和脈衝輪測量曲軸速度。 曲軸位置感知器有兩個重要功能:
- 根據訊號的頻率可以決定曲軸轉速;
- 脈衝輪中的缺齒表示 1 號和 4 號汽缸的活塞位於上止點之前幾度的曲軸位置。
引擎轉速影響噴油嘴和點火的控制。 36-1 脈衝輪中缺少的齒對於確定點火和噴射時間非常重要。 決定使用霍爾感測器而不是感應脈衝產生器作為速度感測器。 電感式感測器產生交流電壓,必須在 MegaSquirt 控制器中將其轉換為直流電壓。 霍爾感測器產生方波電壓,透過內部或外部上拉電阻將其放大至 5 或 12 伏特電壓。 這使得霍爾感測器更適合形成可靠的訊號。 必須在組裝 MegaSquirt 之前提前做出此選擇; 兩種感測器需要不同的電路結構。
脈衝輪:
曲軸位置感知器測量安裝在引擎上的脈衝輪的氣隙變化。 然而,路虎引擎最初沒有曲軸位置感知器,因此沒有脈衝輪。 因此必須隨後安裝脈衝輪。 人們對脈衝輪的位置和位置進行了許多思考。 可能性是:
- 具有 36 個齒的圓盤,透過夾具或螺栓連接方式固定在曲軸皮帶輪的外側。
- 透過銑削皮帶輪齒來調整目前的曲軸皮帶輪。
通常使用 36-1 或 60-2 脈衝輪。 60齒脈衝輪主要用於較大直徑。 36-1因其齒寬而適合使用。 脈衝輪的高度行程盡可能小,這點非常重要。 高度變化意味著感測器和脈衝輪齒之間的磁場變化。 這會對引擎的運作產生不利後果。 這當然必須防止。 因此,最好調整目前的曲軸皮帶輪。 現有曲軸皮帶輪的外緣是在銑床上加工的。 凹口是通過去除材料而形成的。 其餘 36 個齒用於允許感測器測量磁場的變化。 已磨掉一顆牙齒作為參考點。 下圖為加工後的曲軸皮帶輪。
磨齒在脈衝輪頂部、感測器正下方可見。 當曲軸處於此位置時,並不意味著 1 號和 4 號汽缸的活塞處於上止點,而是這些活塞在上止點之前 90 度,對應於 9 個齒 (360/36)。 當缺失的牙齒經過時,MegaSquirt 會收到一個訊號,表示應該很快就會點火。 從那時起,將計算何時應啟動點火線圈。 在不同的操作條件下,預點火時間也根據該參考點決定。

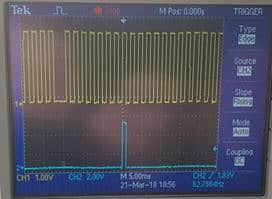
示波器影像(見圖)顯示了曲軸訊號(上)與點火線圈控制訊號(下)的比較。 點火線圈的控制脈衝在缺失齒之後的第八個齒處形成。 當引擎怠速時,點火提前10度,相當於1齒。 這對應於移除的齒和實際上死點之間的 90 度(9 個齒)。
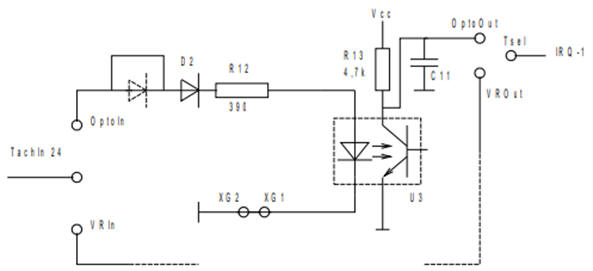
為了在 MegaSquirt 中組裝霍爾感測器電路,必須安裝電容器 C11、電阻器 R12 和 R13、二極體 D2 和光耦合器 U3(見下圖)。 來自霍爾感測器的訊號進入圖 105 中「Opto in」下的圖表。 訊號通過二極體和電阻到達所謂的光耦合器。 此組件用虛線表示。 光耦合器是一個小型積體電路,其中左側的 LED 在點亮時導通右側的光電晶體管。 光耦合器可以看作是控制部分和開關部分之間沒有機械或電氣連接的開關。
當光耦合器中的電晶體導通時,會有小電流從Vcc流到接地。 此時「Opto Out」上的電壓為 0 伏特。 如果電晶體不導通,則沒有電流,因此電阻器 R13 上沒有壓力降。 “Opto out”上的電壓為 5 伏特。
透過使用光耦合器,在二極體和光電晶體管之間實現電流隔離。 由於擊穿電壓通常大於 5 kV,因此危險的干擾電壓不會進入微控制器電路。
地圖感測器:
MAP 感知器(歧管絕對壓力感知器)可測量進氣歧管中的壓力。 MegaSquirt 使用該壓力、引擎轉速和入口溫度來計算進入引擎的空氣量。 對於路虎發動機,將測量絕對壓力(外部氣壓)或負壓。 這是一種自然吸氣式發動機,會吸入自己的空氣。 配備渦輪增壓器的引擎必須應對進氣歧管中的超壓。 MAP 感知器的測量範圍通常在 0,2 至 1.1 bar 之間。
進氣歧管中的壓力以及節氣門的開度(透過節氣門位置感知器測量)和引擎轉速可以確定引擎負荷。 由於沒有MAF感知器(歧管空氣流量),吸入的空氣量是根據引擎數據和進氣歧管中的負壓來計算的。 我們決定不使用 MAF 感知器,因為它不是為引擎設計的,訊號不太可靠。 將設定與進氣歧管屬性相符非常複雜。 為此需要許多校正因子。
使用的MPX4250AP MAP感知器如圖所示。 MegaSquirt 電路板標配適用於此類 MAP 感知器的連接選項。 該感測器也作為標準配置包含在建造套件中。 噴射的燃料量尤其取決於存在的空氣量,因為試圖實現化學計量混合比(14,68公斤空氣比1公斤燃料)。 可以選擇不同時使用 MAF 和 MAP 感知器。 然後吸入的空氣量將根據所謂的 Alpha-N 規則來決定。 考慮到燃氣閥的位置,這對於存在的空氣量是決定性的。 然而,它的精度不如 MAP 感測器,因此沒有選擇它。 在本專案中,節氣門位置感測器僅用於加速濃縮。

冷卻液溫度感知器:
在經典設定中,引擎缸體上沒有溫度感知器。 這具引擎標配雙金屬零件,具有在冷卻液溫度過高時打開儀表板燈的功能。 由於引擎管理系統確實考慮了冷卻液和進氣的溫度,因此決定改裝 NTC 電阻。 NTC 電阻具有負溫度係數。 這意味著電阻值隨著溫度升高而降低。 選擇的冷卻液溫度感測器是 2,5⁰ 攝氏度時電阻值為 25 kΩ 的感測器。 在最重要的溫度範圍內電阻變化最大。 必須繪製 NTC 電阻的特性才能計算正確的溫度。
當溫度範圍在 0⁰C 到 60⁰C 之間變化時,電阻變化最大。 這可以從特性的過程看出; 在上述溫度範圍內,電阻下降約 5kΩ,而在 T ≥ 60⁰C 時,電阻幾乎不會下降。 在某些情況下,還需要測量 60°C 以上的溫度。 為了實現這一點,可以在特定溫度下將內部偏壓電阻切換為不同值的偏壓電阻。 這產生了兩個 NTC 特性。 然而,在該專案中,冷卻劑溫度專門用於冷啟動濃縮,在60℃以上幾乎不使用。
低溫也是最有趣的。 冷啟動濃縮將在這裡進行; 當引擎處於冷態時,噴油嘴的啟動時間會更長。 當引擎充分預熱(T ≥ 60⁰C)時,加濃的情況會越來越少。 從 T = 90⁰C 開始,注入策略會根據參考欄位中的設定值運作。 參考欄位是輸入的預設值。 外部因素,例如低溫下的冷啟動濃縮,形成該標準值的修正因子。 MegaSquirt 不再考慮冷卻劑溫度。
氧氣感知器:
拉姆達感知器(感知器)安裝在排氣裝置中,用於測量廢氣中的空氣/燃料比。 lambda 感測器的一項重要任務是透過完成 AFR 和 VE 表來在後期「調整」引擎管理。 為了深入了解理想的混合比以及富集或貧化的有用性和必要性,首先定義化學計量混合比、富集和貧化。
化學計量混合比表示空氣和燃料之間的比率,其中使用了空氣中的所有氧氣。 比例為 14,68:1(四捨五入為 14,7 公斤空氣比 1 公斤汽油)。 然後我們討論 λ = 1。
不同工作條件下的 lambda 值可能會有所不同:
- 富集度:λ<1;
- 貧窮: λ > 1。
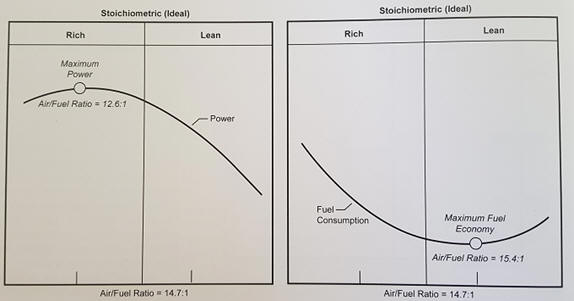
加濃至 λ = 0,8 表示適用 11,76 kg 空氣與 1 kg 汽油的混合比。 因此,燃燒 1 公斤燃料所需的空氣較少。 富集或貧化混合物必須始終保持在爆炸極限之內。 當引擎必須提供更多動力時就會發生濃縮。 較濃的混合物還可以提供冷卻作用。 另一方面,稀薄的混合物可以提供更好的燃油消耗。 下圖顯示了兩個圖表,顯示了最大功率和最低油耗。
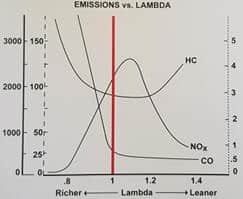
拉姆達值不僅影響功率和油耗,也影響廢氣排放。 更濃的混合物可確保更低的氮氧化物含量,但也能提高二氧化碳和碳氫化合物的排放量。 當混合物較稀時,燃料顆粒之間的距離更遠,因此燃燒不再是最佳狀態; 結果HC排放量也增加。 下圖顯示了與 lambda 值相關的排放。 使用催化劑時,需要確保噴射在濃和稀之間不斷交替。 在濃混合氣中,由於缺氧而形成一氧化碳,催化劑利用它來還原氮氧化物。 稀薄混合氣含有過量的氧氣,會氧化 CO 和 HC。
氧感知器有兩種類型: 跳躍感應器和寬頻感應器。 MegaSquirt 支援這兩種類型。 然而,在設定VE表時,跳躍感應器不適合,因此選擇使用寬頻感應器。 VE表是透過根據測量的AFR調整VE值來設定的。 儘管原則上可以透過計算輸入 VE 值,並且很大程度上基於扭矩曲線,但 AFR 很快就會超出跳躍感測器的範圍。 寬頻感測器因其測量範圍大而提供了一種解決方案; 它可以測量 8,0 到 1,4 之間的 AFR。 當引擎運轉時,幾乎所有情況下混合物成分都會在此測量範圍內,因此寬頻感知器適合設定 VE 表。 沒有寬頻感測器的調諧實際上是不可能的。
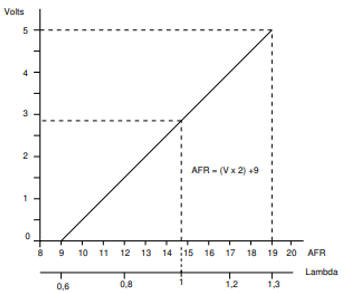
MegaSquirt 沒有內部 lambda 控制器。 一旦知道寬頻感測器的屬性,就可以將它們輸入到 TunerStudio 程式的表格中。 在其他情況下,需要具有外部控制器的寬頻感測器。 輸出電壓已透過外部控制器實現線性化。 從控制器到 MegaSquirt 的輸出電壓介於 0 至 5 伏特之間,lambda 值與電壓之間呈線性關係。 電壓值在 MegaSquirt 中轉換為 lambda 值。 該圖顯示了具有線性梯度的圖。
Volgende: 執行器.