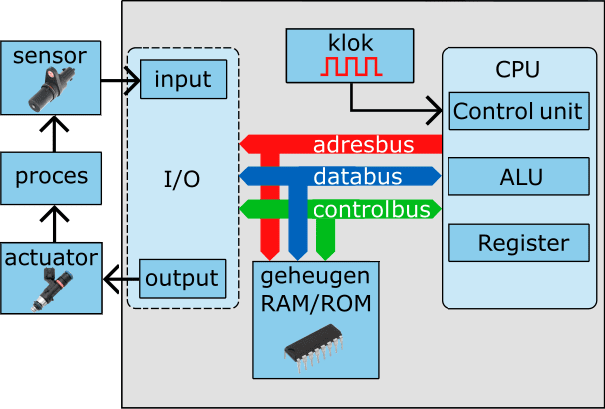
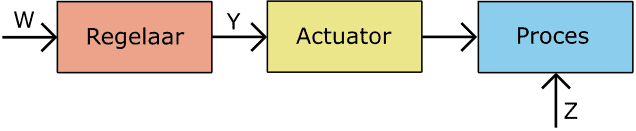
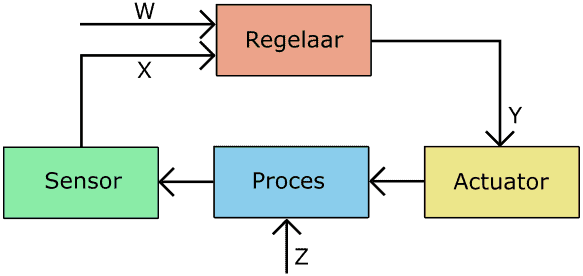
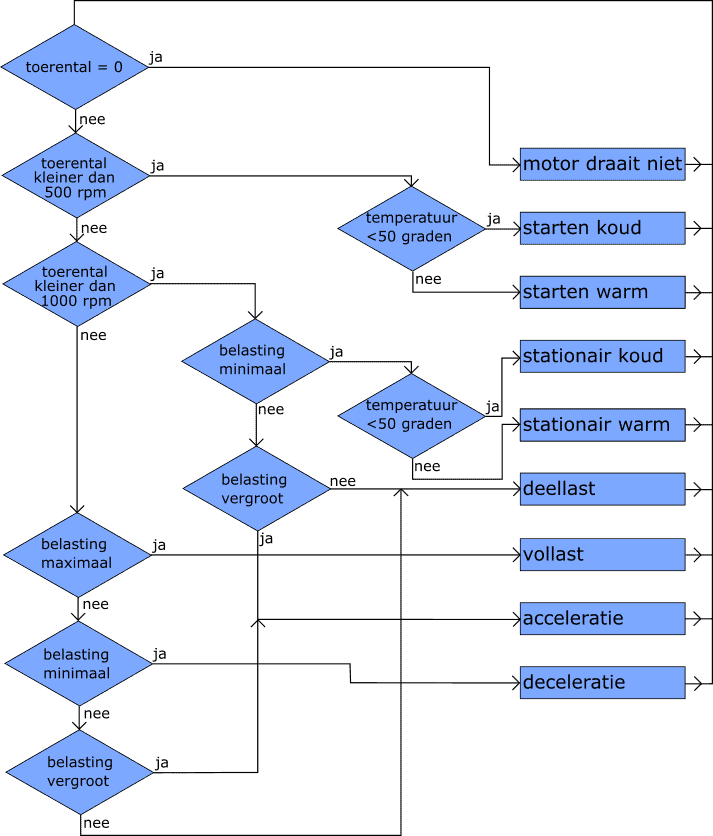
過程控制 科目:控制技術基於操作條件的製程控制 控制技術:ECU 測量、控制和調節過程。 ECU 接收來自感測器的資訊。 感測器將物理量的變化轉換為電訊號。 此感知器資訊透過輸入進入 ECU。 可能的輸入訊號來自:速度感測器;溫度感應器;負載(負壓)感知器;氧感知器。傳入的訊息不一定會直接導致採取行動。 只有當測量值偏離期望值時,才能調整執行器的控制。 ECU則具有「調節」功能。 是/否決定是透過預先編程的電腦程式(ROM / 快閃記憶體)做出的。 ECU 中的製程控制 測量: 感測器(在本例中為感測器)測量物理量並將其轉換為電訊號。 此測量值 (X) 被傳送到控制器。 測量值不一定會直接導致行動; 想想恆溫。 駕駛: 控制器(ECU)控制執行器。 沒有來自感測器的回饋,因此 ECU 不遵循處理順序。 因此,過程中的錯誤並不總是能夠被識別出來。 控制的例子是手動操作喇叭(W); 操作開關時,ECU 控制喇叭 (Y)。 喇叭上沒有控制功能,因此無法辨識故障(Z)。 安排: 控制器可以將手動命令 (W) 或測量的傳感器值 (X) 處理到執行器控制中。 執行器導致過程發生變化; 例如,考慮注射持續時間。 注入更多意味著混合物更豐富。 氧氣含量由 lambda 感測器測量,並將測量值 (X) 傳輸至控制器。 當出現不可預見的故障(例如噴油嘴堵塞)時,會導致過程發生變化 (Z)。 這種偏差也由感測器測量,以便控制器可以透過執行器控制來調整製程。 根據操作條件進行製程控制:內燃機的引擎管理系統必須在所有運作條件下以最佳方式燃燒混合物。 確定混合氣成分和點火正時對於確保廢氣成分(排放)、經濟性和實現所需功率至關重要。每個操作條件都有自己的控制技術:冷啟動:混合氣濃,點火晚;熱啟動:混合物比冷啟動期間不太濃;冷怠速:混合氣豐富,怠速提高;熱怠速:怠速較低時,混合氣較不濃;部分負荷:混合氣化學計量,速度範圍在 1500 至 4000 rpm 之間,點火正時已預先確定,lambda 控制處於活動狀態;滿載:混合料濃,負載高,速度高;加速:混合氣濃,點火晚;減速:混合氣稀,點火早。 製程管制流程圖 相關頁面: ECU 和數位電子產品概述頁面; 接口電路; ECU 的操作。