科目:
- 太陽輪、行星架和齒圈
- 自動檢驗機構
- 行星齒輪系統變速器
- 計算一檔傳動比
- 計算二檔傳動比
- 計算第三檔傳動比
太陽輪、行星架和齒圈:
行星齒輪系統由至少一組齒輪組成,每組齒輪有太陽輪、行星架和齒圈。 因此需要有關行星齒輪系統操作的基本知識(例如轉動太陽齒輪、帶有衛星齒輪的行星架和環形齒輪,請參見第 自動變速箱).
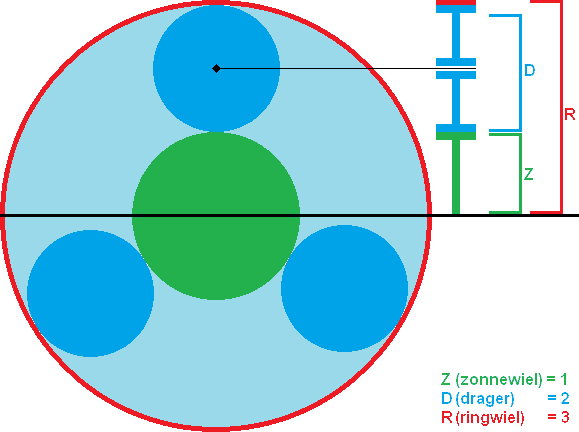
下面是齒輪組的圖像,其中太陽齒輪為綠色,帶有衛星齒輪的托架為藍色,環形齒輪為紅色。 清晰可見齒輪組被分成兩部分。 計算是透過方程式完成的,因此即使所有內容都除以二也沒關係。 畢竟,比例保持不變。
在本頁的進一步內容中,我們將使用比率 Z、D 和 R 進行計算。透過遵循連接各個行星系統的線,可以使用所有 Z、D 和 R 的比率來確定相關齒輪的總傳動比。
自動變速箱:
傳統的自動變速箱透過在不同的行星齒輪系統之間切換來工作,請參閱章節 自動變速箱。
下面是自排變速箱中四組行星齒輪系統的示意圖。 共有三種前進檔系統和一種倒檔系統。 紅線表示通過自動變速箱的力的方向; 從左側(帶變矩器的引擎側)穿過帶有行星系統的完整部件(黑線)到傳動軸的聯軸器。 如果您仔細觀察變速箱中的系統,您會發現上圖是由它們衍生的。 變速箱中使用了四個系統,每個系統都有 Z、D 和 R(太陽輪、行星架和齒圈)。

行星齒輪系統在中心線上方和下方對稱。 沒有其他辦法,因為行駛時內部會旋轉。 為了深入了解齒輪嚙合時發生的情況,下圖中行星系統中的從動部件也以紅色突出顯示:

在上圖中,齒輪 1 已嚙合。 要接合 1 檔,必須接合離合器。 該連結顯示為藍色。 對於閉式聯軸器和行星系統的一側從動側,一個部件也必須旋轉。 在這種情況下,零件的尺寸決定了傳動比(想像一下小輸入齒輪和大輸出齒輪;大齒輪將旋轉得更慢。如果大齒輪的齒數是小齒輪的兩倍,那麼比例為1:2 )。
原則上,這也適用於自動變速箱; 所有四個系統中的環形齒輪、太陽齒輪和衛星齒輪的尺寸都不同。 現在您可能可以想像,當另一個離合器通電時(例如左側的系統),輸出軸的速度改變了。
在本頁的進一步內容中,影像、解釋和計算解釋了自動變速箱中的行星齒輪系統在行駛時如何換檔。
行星齒輪系統變速器:
我們現在要看看變速箱的上半部(因為盒子上下對稱,見下圖)。 根據該圖像,我們將確定頁面稍後的傳輸情況。 系統上方顯示系統編號; 從1到3和系統R(反向)。
每個星係都有自己的 Z、D 和 R。這在圖像中沒有顯示,但如果您再次查看本頁頂部的圖像,您就會認出它。 這將在本頁稍後被視為已知。
在影像的左下角,您可以看到耦合“K4”,該耦合確保系統的兩側同時連接; 系統 3 連接到系統 1 和 2。 沒有其他連接被關閉,因此整個系統被“阻塞”。 引擎轉速以1比1的方式傳遞給車輛的車輪,無傳動比; 我們稱之為直接價格。 這是第四檔。
在配備手排變速箱的汽車中,第四檔通常也是直接驅動的。 在這裡,引擎轉速也以 1 比 1 的比例傳輸到車輪。
輸入軸(引擎或液力變矩器)和輸出軸(車輛)的速度差稱為傳動比。

第一檔已接合。
透過固定係統 I 的托架(使用聯軸器 K1),力可以從太陽輪傳遞到托架。 載具與車輛相連,因此引擎和變速箱之間現在有直接連接。 零件的尺寸決定了齒輪比(稍後會詳細介紹)。
紅線表示力的級數。 綠線表示哪些其他組件正在運行,因為它直接連接到紅線。 這些部件確實旋轉,但由於離合器沒有通電,因此它們不會發生任何變化。 他們只是閒著。 藍線表示耦合器 K1 通電時固定的情況。 這樣不僅系統1的行星架被固定,系統3的行星架和系統R的太陽輪也被鎖定。

如上所述,當換入一檔時,離合器 K1 通電。 當換至二檔時,離合器K1將脫開,另一個離合器將通電。 這可以從表中看出。
當換至二檔時,離合器K2將通電。 然後固定係統2的齒圈。 由於系統2的太陽輪是固定的,並且太陽輪被驅動,因此托架將旋轉。 此載體將依序驅動系統 1。 在系統1中,齒圈這次沒有被阻擋,而是由另一個系統驅動。 在這種情況下,輸出速度(車輛的線)將因此具有比換檔第一檔時更低的速度。

本頁透過圖像、解釋和計算進一步闡明了這一點。
計算一檔傳動比:
根據下表,連結K1已關閉。 因此環形齒輪被鎖定。 來自引擎的驅動力通過太陽輪並通過行星架傳遞至車輛。 也給出了比率,即係統 1,00 的太陽輪為 3,00,齒圈為 1。我們將以此進行計算。
計算行星齒輪系統傳動比的基本公式如下:
ω 代表 歐米茄 並且是 角速度 轉彎時。
因為我們用系統1計算,所以我們在所有內容後面加1。 我們為以下系統更改此數字。 特別是在多個系統的情況下(一個系統驅動另一個系統),必須這樣注意,因為否則會變得非常混亂。
下圖是第一檔的示意圖。 為清楚起見,Z(太陽輪)、D(行星架)和 R(齒圈)以藍色繪製。


我們現在填寫第一個系統的基本公式。 歐米伽身份不明,配戴者一動也不動。 所以我們不能為此填寫任何內容。 Z1和D1是已知的,所以我們將它們填入。 R1 是靜止的,所以我們把它劃掉。 我們不會在公式中添加任何東西。
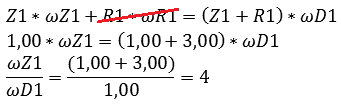
現在您可以看到第一檔的傳動比為 4。
在汽車技術中,這種情況永遠不會發生,它總是略高於或低於 4,因為否則齒輪總是在同一表面上相互接觸(額外磨損)。 但這裡作為例子計算起來比較容易。 現在您還可以看到 omega 已被知道!
ωZ1 = 4
ωD1 = 1
這些歐米茄是系統中軸的角速度。 在第一檔中,歐米茄並不重要,但在計算雙驅動系統時(如在第二檔中將變得清楚),它很重要。
計算二檔傳動比:
在計算第二檔傳動比時,必須考慮到第一系統是雙驅動的; 系統1的太陽輪由馬達驅動,托架由系統2驅動。 現在,這導致與環形齒輪靜止的情況(例如第一檔)不同的車輛速度。

在計算時,我們總是從僅被驅動的系統開始。 在這種情況下,它是系統 2,因為它僅由馬達通過太陽輪驅動。
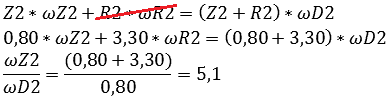
第二系統執行的傳輸是5,1。 這不是引擎和車輪之間的傳動,而是引擎和系統 1 之間的傳動。現在我們將使用系統 1 的數據計算系統 2 的傳動比,因為現在已知歐米茄:
ωZ2 = 4,1
ωD2 = 0,8
如果您現在查看該圖,您將看到系統 1 和 2 的太陽輪相互連接。 系統 2 的行星架和系統 1 的齒圈也相互連結。 連接部分的歐米伽是相同的,所以我們可以說:
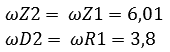
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
仔細觀察這一點非常重要! 始終遵循圖中的線條。
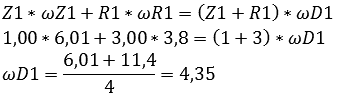
現在我們將這些 omega 輸入到系統 1 的計算中。
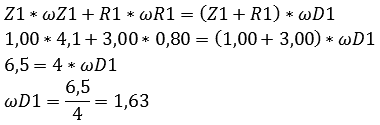
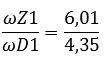
現在,我們可以輸入歐米茄除以輸出歐米茄來確定最終的最終傳動比。 如果我們看一下該圖,我們會發現太陽輪系統 2 的歐米伽是傳入的,而行星架系統 1 的歐米伽是傳出的。
因此,2 檔的總傳動比為 2,52。
計算三檔傳動比:
在計算第三檔時,必須考慮到所有三個系統一起工作。 始終從單驅動系統開始。 在本例中是第三個:

系統3的太陽輪是固定的,因此不參與。 然後輸入其餘的所有值:
由此我們得到:
然後我們進入系統 2。您在系統 3 的計算中輸入系統 2 已知的 omega:
現在我們進入系統 1。這裡也輸入了已知的 omega:
最終我們得到:
即三檔總傳動比為1,38。
計算第四檔傳動比:
在四檔時,離合器 K4 會閉合。 這意味著系統 1、2 和 3 的太陽輪同時連接到馬達。 整個系統現在被封鎖。 所有omega都是平等的。
如果所有歐米茄都相等,則不可能有齒輪比。 引擎轉速直接傳輸至車輪。 我們稱之為直接價格。