科目:
- 一般停車協助
- 停車距離控制
- 倒車攝影機
- 側面圖
- 環視
- 停車輔助
一般停車協助:
停車輔助包括幫助駕駛者進出停車場的系統。 最廣為人知的停車輔助系統是“停車距離控制”,縮寫為PDC。 該系統可以告知車輛駕駛員與後車的距離,或者透過廣泛的系統還可以告知車輛前部的距離。 本頁介紹了現代技術,這些技術要么是停車距離控制的延伸,要么是完全獨立的輔助系統。
停車距離控制:
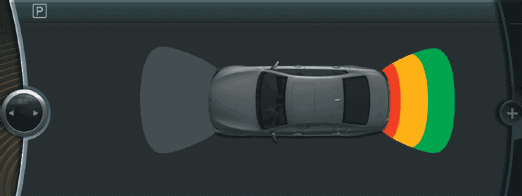
停車距離控制 (PDC) 是一種距離警告系統,可在進入和退出停車位時測量訊號並提供有關障礙物距離的資訊。 後保險桿上有超音波感測器,前保險桿上通常也有超音波感測器(見圖)。 它們發出人耳無法察覺的頻率非常高的聲波。 這些超音波頻率從附近的物體反射並被感測器接收。 感測器測量發送和接收這些訊號之間的時間。 物體越近,訊號反彈越快。 感測器捕獲它並將其傳遞到 PDC 控制單元(電腦)。
該計算機可以將其以音頻信號以及圖像和聲音信號的形式傳輸給駕駛員。 然後會聽到嘟嘟聲,隨著物體越來越近,嘟嘟聲變得越來越快。 在大約 30 公分的距離處,它會發出持續的蜂鳴聲,告訴您作為駕駛員必須停車。

現代機載電腦通常配備一個選項,可以在螢幕上顯示到物體的距離。 PDC感測器相同; 控制單元計算來自感測器的數據並將其處理成螢幕可以顯示的資訊。
下圖顯示了 PDC 控制單元 (ECU)。 這個灰色方塊包含微控制器、擴大機和一個與閘。 微控制器傳輸頻率約為 40 kHz(黑色)的方波電壓。 也週期性地輸出低頻塊電壓(紅/藍)。 與閘接收兩個模組電壓。 當兩個電壓都很高時,輸出電壓(與閘右側)也很高。 當兩個電壓之一低時,輸出也變低。 輸出電壓被傳送回微控制器和 PDC 感測器中的發射器。 發射器以大約 300 m/s 的速度發射超音波訊號。 當附近有物體時,超音波會反射並被接收器記錄。 我們稱之為「三角測量」。 接收器將形成的區塊訊號傳送至ECU。 使用放大器放大塊訊號,然後由微控制器處理。
從與閘和擴大機接收輸出訊號之間的時間是到物體距離的度量。 PDC感測器與物體之間的距離越小,時間越短。 微控制器控制蜂鳴器或透過CAN總線與其他控制單元通訊。
下面的電路圖 (VAG) 顯示了控制單元、開關輸入和蜂鳴器等輸出之間的通訊。
PDC控制單元(J446)透過CAN匯流排接收行駛速度和倒車訊號。 PDC 控制單元透過連接 T12/11 將調變塊電壓傳送到連接到所有 PDC 感知器(G86、G203、G334 和 G335)的電纜接頭(後保險桿中的 X206)。 每個 PDC 感知器都有自己的訊號線(透過引腳 2)連接到 ECU。 此外,每個感測器的接地連接至接地焊縫(352)。
當一個或多個感測器偵測到物體時,控制單元會啟動蜂鳴器 (H15)。 根據與物體的距離,蜂鳴器發出更快或更慢的間歇聲音訊號。

透過與診斷介面 (J533) 進行通信,可以執行以下診斷功能:
- 查詢故障記憶
- 調整控制單元的編碼(例如,在前面使用 PDC 感測器擴展系統後或安裝牽引桿後)
- 調整蜂鳴器音量
- 詢問測量值塊,其中包括所有感測器到物體的距離、計算的距離以及發射器和接收器的穩定時間。
倒車攝影機:
除了停車距離控制外,停車輔助還可以配備倒車攝影機。 當駕駛將車輛掛入倒檔或按下車內按鈕時,車輛後方的攝影機就會啟動。 通常收音機或車載電腦的螢幕會顯示該影像。
下圖顯示了 BMW 顯示屏,圖像位於車輛後部。 攝影機影像的右側是一輛車輛,其前後都有三部分網格; 這顯示了 PDC 感測器記錄到的物體的距離。
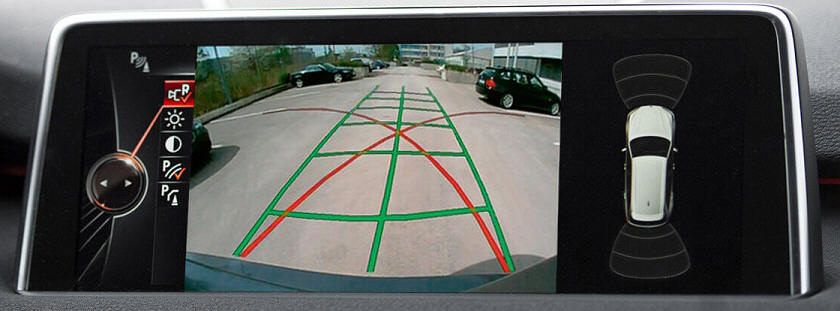
在倒車攝影機影像中可以看到紅色和綠色的線條。 紅線表示車輛可以轉向的可能方向; 在最大轉向時,車輪將沿著彎道外側的紅線行駛。 綠色網格沿著車把轉動的方向; 此時前輪筆直向前。 當駕駛者轉動方向盤時,綠線表示實際行駛路線。 轉向角感測器記錄方向盤的位置。
倒車攝影機有時是清晰可見的,並且通常位於車牌和/或打開尾門的把手附近。 有時製造商會選擇將相機安裝在視線之外。 下圖顯示了大眾高爾夫的倒車攝像頭,其中電動馬達傾斜大眾標誌以將攝影機向外移動。 當您再次向前行駛時,標誌會自動折回。 不僅將相機放置在視線之外,鏡頭也不易髒。

側面圖:
當您在兩輛車或大型物體之間倒車時,您必須向前行駛一點才能左右查看。 使用側視攝影機(也稱為角落視圖),這要容易得多; 前保險桿左右兩側的攝影機將影像傳送到儀表板的螢幕上。 此影像顯示來自角落攝影機的影像。 不幸的是,攝影機不能安裝在隱形的地方。 配備側視攝影機的汽車保險桿上(通常)有一個黑色鏡頭。 下圖顯示了帶有左側攝影機的寶馬前保險桿。


環視視圖:
最豪華的停車輔助系統無疑包括“環視”,也稱為俯視、3D或鳥瞰。 每個品牌都為系統賦予了自己的名稱和特徵。 我們現在使用名稱“環繞視圖”。
透過環視視圖,汽車的頂部顯示在螢幕上。 看起來好像有一個攝影機正在觀察車頂及其周圍區域。 汽車是一個模擬的,環境是由幾個(通常是四個)攝影機組成的記錄的。
以下三幅圖像(來自 BMW)顯示了駕駛員看到的圖像。 停車時,停車位與柱子等物體的分離清晰可見。 倒車時,可放大後方; 在這裡你主要可以看到植物。 傳統的 PDC 感測器記錄到植物的距離。 計算機用紅色標示該距離。

向前停車時,系統還可以顯示周圍情況和前方情況。 PDC 感測器現在還可以幫助確定圍欄的距離。

如果駕駛者不小心,沿著路邊平行停車可能會導致輪胎和輪圈損壞。 環視現在也提供了解決方案; 由於可以清楚地看到街景,您可以直接停車並靠近路邊。 BMW 的最新開發成果使得反轉攝影機影像並模擬車輛成為可能。

接下來的三張圖片顯示了相機經常放置的地方。



停車協助:
作為停車輔助的延伸,所謂的「停車外輔助」可以在視野有限的情況下向後離開停車位時為駕駛員提供幫助。 這可能是在車輛停在牆邊或車輛之間的情況下。
汽車後方的感知器偵測到車輛後方經過的交通,並可能造成碰撞風險。 這包括以一定速度接近車輛的所有移動物體。 當停車輔助系統偵測到有車輛駛近時,資訊娛樂系統顯示器上會出現一則訊息。 通常會添加聲音訊號。 如果駕駛忽略這些訊號並向後行駛,系統會透過操作煞車進行物理幹預,使車輛減速。
