翁德沃彭:
- 车轮引导的自由度
- 车轮导轨中的铰链
- 轮导轨中的导轨
- 计算自由度
车轮引导的自由度:
汽车的悬架包含许多铰链(包括叉骨和减震器上的铰链),它们提供整个悬架的自由度。 轮引导确保可能的轮运动的可能自由度仅限于一或两个。 如果轮子没有“固定”,它将能够自由旋转、倾斜(沿 x 和 y 方向)、转动、上下移动。 原则上,车轮从悬架上“松开”。 它可以在没有“引导”的情况下向任何方向移动。 刚才提到的每个运动都是一个自由度。
车轮悬架,即车轮引导,确保运动自由度限制为 1 个自由度。 这意味着车轮只能在一个方向上“自由”移动,而不受驾驶员的影响。 这种自由运动是压缩和回弹的上下运动。 车轮可以在不平坦的路面上不受阻碍地进出。
汽车的车轮悬架由许多线铰链、球接头和旋转滑动铰链构成。 这些铰链都互相影响。 太多的铰链会产生过多的自由度(因此轮子可能会无意中沿不同方向移动)或 0 自由度(轮子无法移动,因此无法压缩和压缩)。
车轮导轨中的铰链:
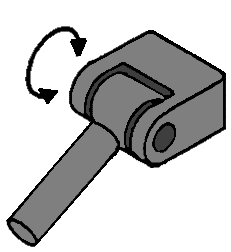
线铰链:
此线铰链可沿 1 个方向移动; 上和下。 这提供了 1 个自由度。
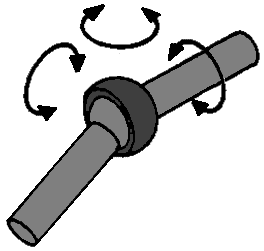
球接头:
通过该铰链,相关部件可以进行 3 种相对运动; 点头、滚动和转动的动作。 这个铰链有3个自由度,因为当铰链“松动”时,它可以进行3个自由运动(见箭头)。
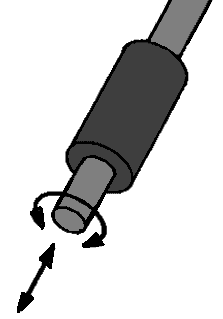
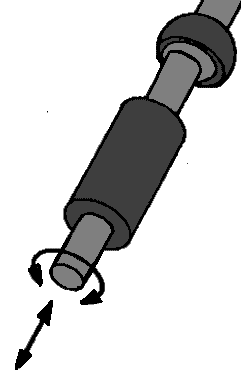
旋转滑动铰链:
该铰链可以进行 2 种运动; 旋转和进出滑动运动。 原则上,这是减震器的示例(来自麦弗逊支柱)。 这2个动作保证了旋转滑动铰链有2个自由度。
滚轮导轨中的导轨:
为了使用各种类型的铰链创建车轮悬架,有时必须将铰链组合在一个物体上,例如叉骨。 我们称这个支撑臂为导向臂。 以下是这些导体的一些示例:
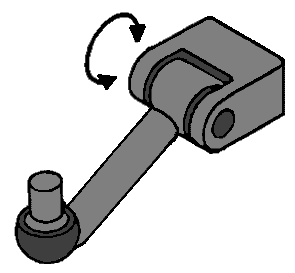
带球形接头的线铰链:
这是叉骨的典型示例,其在线铰链侧连接至车身(或副车架),并在球窝接头侧连接至转向节。 当这整个铰链松动时,它可以在线铰链的移动方向(1方向)和球接头的3方向上移动。 毕竟,线铰链有 1 个自由度,而球接头有 3 个自由度。由于该部件被视为 1 个导体,因此可以将自由度加在一起。 1 和 3 使其具有 4 个自由度。
双球节:
具有双球接头的导向装置的一个示例是具有内拉杆球和外拉杆球的拉杆。 每个球形接头有 3 个自由度,因此由于它是 1 个导体,因此应将它们加在一起。 然而,它们具有相同的自旋转能力,因为如果一个球窝进行旋转运动,那么另一个球窝也会做旋转运动。 因此 1 个自旋转自由度不算在内(参见红色箭头)。 该导体的自由度总共为 1,但在接下来的计算中,在“自旋转 r”下输入数字 6。 然后在计算中减去这个 1。
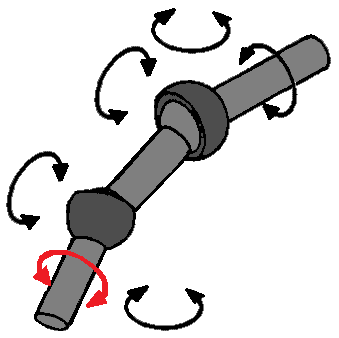
带球形接头的旋转滑动铰链:
如前所述,减震器是一种旋转滑动铰链。 然而,每个麦弗逊支柱上方都有一个球形接头,尽管您一开始不会这么认为。 减震器顶部还有另一个橡胶。 这种橡胶为减震器提供了一定的运动自由度,因此还具有球窝接头的特性。 因此,减震器同时具有旋转滑动铰链的 2 个自由度和球窝接头的 3 个自由度,总共为 5 个自由度。 这里也存在自然旋转,因为旋转滑动铰链的旋转运动与球接头的旋转运动是相同的运动。 所以自转的“r”必须加1。
计算自由度:
可以根据悬架数据计算自由度数。 为了正确完成公式,铰链和导轨必须分为几类:
- L为导体数量
- g 代表关节和铰链的数量
- r 为自然旋转数(与 1 个导轨中的双球窝接头相同)
此外,字母:
- k 为轮架数量(大多数情况下为 1,因为这是转向节)
- εfi 为关节和铰链总数加在一起的自由度数。
F = 6 (k + L – g) -r + εfi
示例:
车轮悬架包含:k 1 轮架(转向节)、L 2 导轨、g 5 关节、r 2 自旋转、εfi 15 总自由度
以公式形式表示为:
F = 6 (1 + 2 – 5) – 2 + 15
F = 6 x (-2) – 2 + 15
F = 1
所以现在有 1 个自由度,所以这很好。 轮子可以做纯粹的上下运动。
为了澄清这一点,这里有一个带有车轮悬架图片的示例:
下图是带有相应图例的麦弗逊支柱。 字母 A、B 和 C 代表导轨,数字 1 至 6 代表铰链/接头。
εfi 是铰链自由度之和; 因此每个球接头有 3 个自由度(即 4 x 3),线铰链有 1 个自由度,旋转滑动铰链有 2 个自由度。
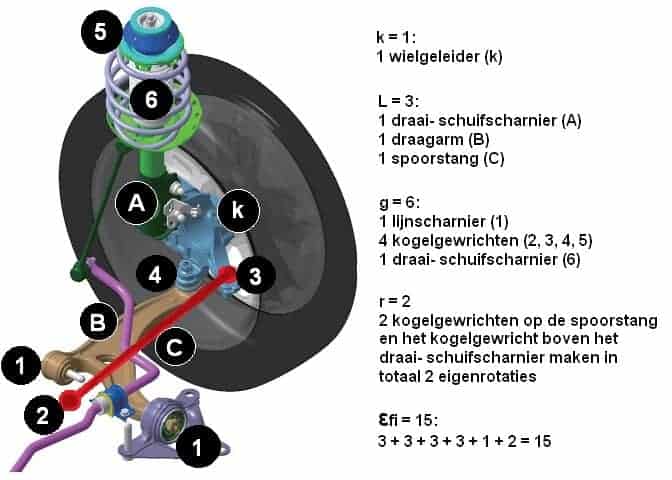
该公式可以这样完成:
F = 6 (k + L – g) -r + εfi
F = 6 (1 + 3 – 6) – 2 + 15
F = 6 x (-2) – 2 + 15
F = -12 – 2 + 15
F = -14 + 15
F = 1个自由度