翁德沃彭:
- 转弯时脚趾向外
- 计算提交的角度
转弯时脚趾向外:
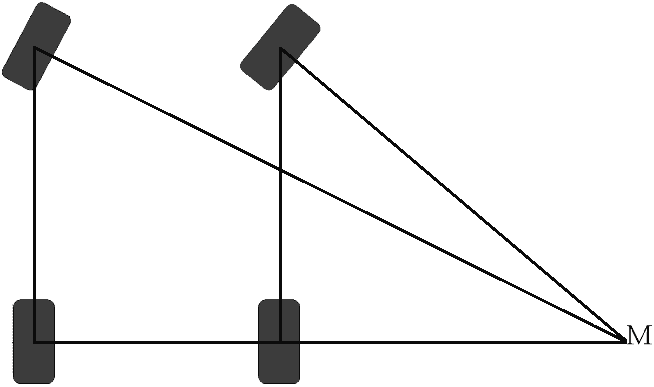
转弯时,前轮不会以相同的角度转向。 内轮总是比外轮进行“更急”的转弯。 该图显示了为什么会这样。
该图像显示前轮的线以角度 M 结束。角度 M 是两个前轮的公共枢轴点。 如果轮子以相同的角度转动(轮子都处于完全相同的位置),则轮子的线也将彼此平行延伸至无穷远。 他们永远找不到共同的枢轴点M。因此,在这种情况下的转向特性将非常差。 整个原理被称为“弯道中外束”。 所有现代汽车都具有此功能。
在光滑的表面上,例如停车场的地板上,转弯时可以听到轮胎的尖叫声。 正是因为这个原则。 内轮的角度比外轮的角度更大,因此会出现一定程度的打滑。 这称为转向误差。 有关转向误差(和图表)的更多信息可以在页面上找到 转向误差.
本页解释了如何使用大量数据计算两个前轮的输入角度(以度为单位)。
计算提交的角度:
要计算输入的角度,需要以下车辆数据:
- 轨道宽度
- 维尔巴斯
- 回转圆直径
- 转向节距离(在本页中,我们保持转向节距离等于轮距宽度)
- 轮胎尺寸(取决于计算。本页使用轮胎尺寸进行计算,但也可以对保险杠拐角进行计算。但是,将添加更多拐角)。
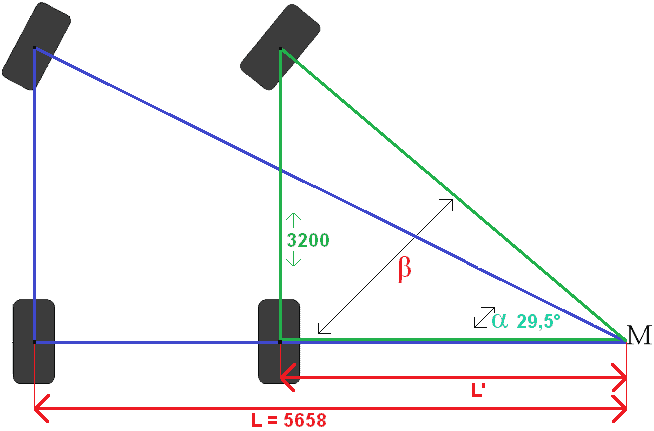
| 轨道宽度=1600mm | 轴距=3200mm |
| 转弯圆直径=13,225m | 转向节间距=履带宽度=1600mm |
| 轮胎尺寸 = 225 | L 和 L' = 未知 |
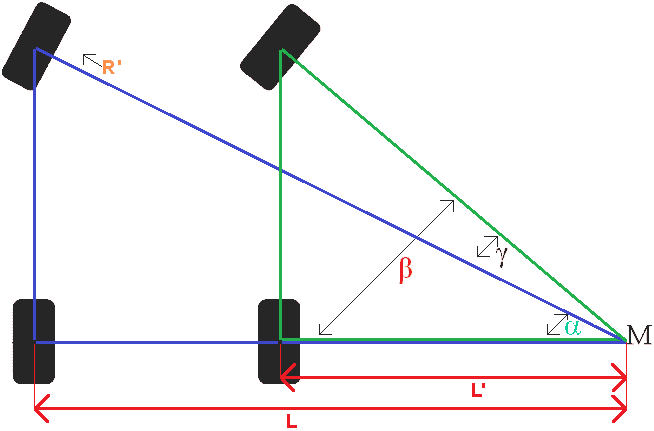
Verklaring van de symbolen:
α = 阿尔法
β=贝塔
γ = 伽玛
这些字母来自希腊字母表,通常用于角度计算。
L = 长度
L' = L 带“重音”作为加法,这在数学上经常使用。 也可以说是L2。 例如,第三个 L 有两个重音:L”。
这同样适用于 R”。
角 Alpha、Beta 和 Gamma 位于 M 点。
角度 Alpha + Gamma = 角度 Beta。
整个转弯圈长13,225米。 R 是半径,因此是半回转圆 (6612,5)。 图中给出了R'。 这个R'并不是一个固定的事实。 这必须通过减去一半带宽来计算。 另一种方法是减去转向节距离,但在本页中我们使用:轮距宽度 = 转向节距离。 简单计算如下:
R = 6612,5 毫米
R' = R – 半带宽
R' = 6612,5 – (225:2)
R' = 6612,5 – 112,5
R' = 6500 毫米
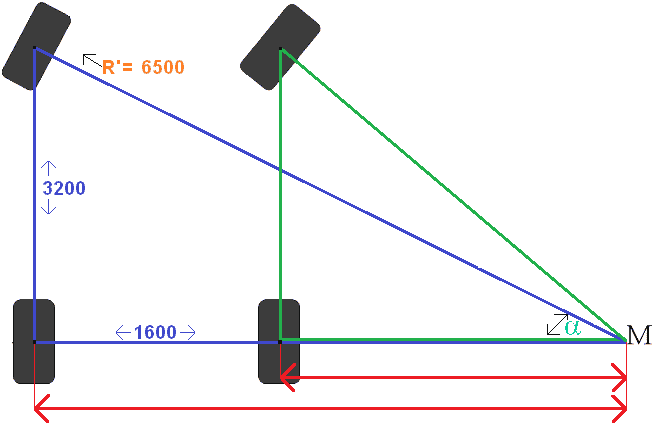
我们填写图像中的R'。 然后我们用正弦法则计算角度 sin α (sine Alpha)。 然后,我们使用正切和毕达哥拉斯定理计算剩余的角度。
与正弦的角度计算:
Sin α = 对边:斜边
Sin α = Wb : R'
正弦α = 3200 : 6500
正弦α = 0.492
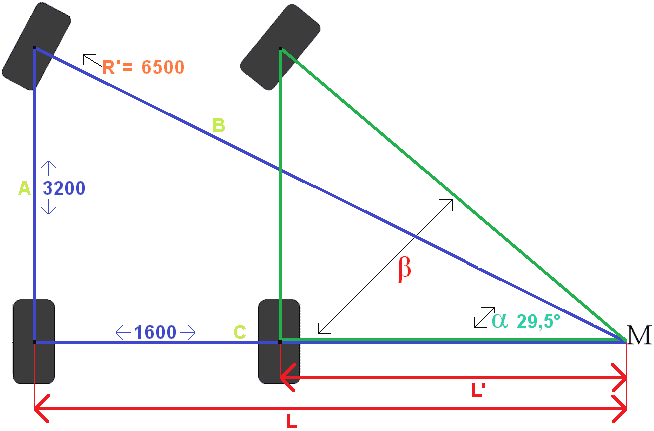
反弦α = 29,5°
计算说明:
我们要计算 Sin α。 窦将相对侧除以斜侧(助记:SIN = SOS)。
Wb=轴距=3200mm。 我们之前计算出 R' = 6500mm。
然后我们将其分开; 那么我们有 Sin α = 0.492。 要将这个数字转换为角度,请在计算器中输入 sin-1 按钮(通常先按 Shift 按钮,然后按 Sin 键),然后输入 0.492 或 ANS 按钮。 现在29,5度的角度映入眼帘。
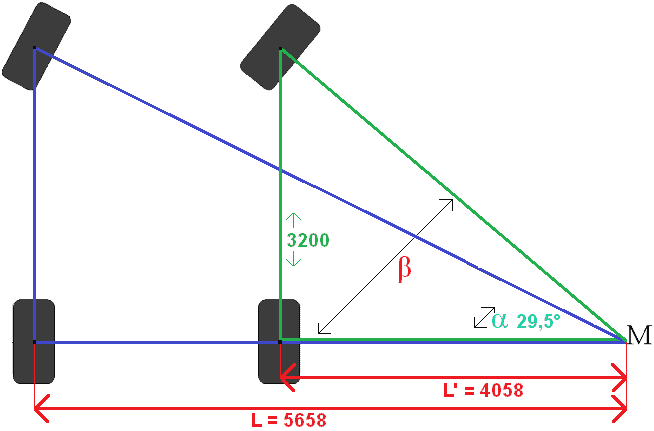
Sin α 现在已知。 现在我们实际上想要计算 tan β,但是我们需要长度 L'。 这个必须先计算一下。 因此,我们使用计算 L' 的结果来计算 Tan β。
L' = L – 轨道宽度。
我们使用毕达哥拉斯定理计算 L。 三角形的 2 条边已知(6500 和 3200)。 1600的另一边是从轮胎到轮胎的轮距宽度,所以不算。 我们将计算从左后轮胎到公共点 M 的底边。 因此,计算涉及完整的蓝色三角形。
勾股定理看起来像这样:
A^2 + B^2 = C^2。 (符号 ^ 是“幂”的符号。所以它表示 A 平方 + B 平方 = C 平方。我们在这里的表述略有不同。
我们将长度 3200 称为 A,6500 称为 B,最低的未知边称为 C:
C^2 = 6500^2 – 3200^2
C^2 = 42250000 – 10240000
C^2 = 32010000^2
为了消除平方,我们取数字的平方根。
C^2 = √32010000
C = 5658 毫米。
C边实际上是长度L。
现在可以计算L'了。 全长 L 和轨道宽度已知,因此可以轻松将两者相减:
L' = L – 轨道宽度
L' = 5658 – 1600
L' = 4058 毫米
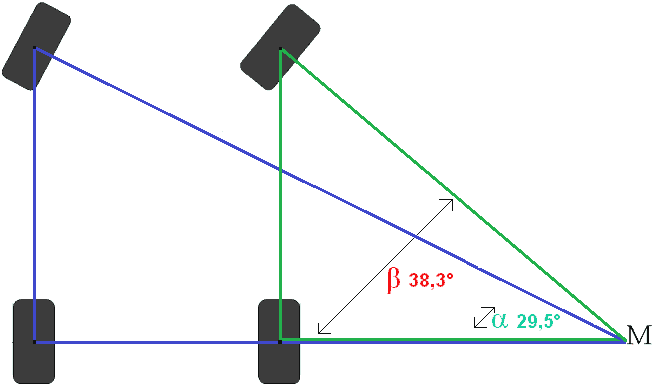
现在 Wb 和 L' 是已知的。 三角形三条边中的两条是已知的,因此您可以使用切线来找到第三条边 沃登 计算:
与切线的角度计算:
Tan β = 对边 : 邻边
Tan β = Wb : L'
正切值 = 3200 : 4058
正切值 = 0.789
Inv Tan β = 38,3°
计算说明:
我们要计算 Tan β。 切线是将对边除以邻边(助记符:TAN = TOA)。
Wb=轴距=3200mm。 我们之前计算出 L' = 4058mm。
然后我们将其分开; 那么我们有 Tan β = 0.789。 要将这个数字转换为角度,请在计算器中输入 tan-1 按钮(通常先按 Shift 按钮,然后按 Tan 键),然后输入 0.789 或 ANS 按钮。 现在38,3度的角度映入眼帘。
现在两个前轮的转向角已经计算出来了。 左前轮的角度为29,5°,右前轮的角度为38,3°。 这意味着两个车轮的转向角相差 8,8°。 在向左转弯时,相同的转向角将导致相同的转向角。
在页面上 车轮几何形状 描述了几个车轮位置。