主题:
- 驱动程序错误
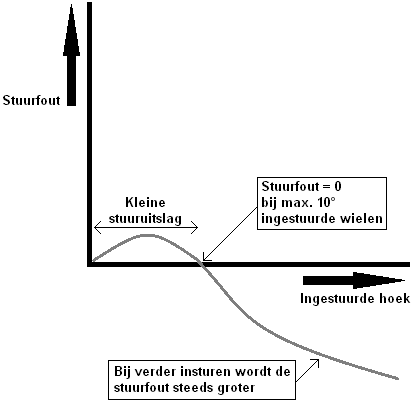
当阅读上述页面时,会清楚地看到左前轮和右前轮都有不同的转向角。 所以转向错误几乎总是会发生。 转向误差意味着两个输入的角度不相等,因此一个车轮比另一个车轮滑移更多。 只有一种情况不会发生转向错误。 这是在以较小的转向角度(最多大约 10 度)转弯时发生的情况(见图)。
图中的X轴表示转向角,Y轴表示转向误差。 在左侧拐角处(即 X = 0 处),您向前直行。 “小转向角”下方的线沿 X 轴正向延伸。 该线表示最大转向角为10度时的转向误差为0。 因此,最大转向角度为 10 度时,不会出现转向误差。 这样前轮就不会打滑。 这是故意这样构造的,因为高速行驶时(例如在高速公路上)转向角通常在 10 度左右。 高速行驶时,前轮不打滑,最大转向角度为10度,抓地力最大。 随着进一步转向,转向误差变得更大。 原则上这不是问题,因为这通常是在城市中,速度较低。 在较低速度下,转向误差的影响小于在较高速度下的影响。