翁德沃彭:
- 确定并安装发动机管理系统的传感器
- 曲轴位置传感器
- 脉冲轮
- 地图传感器
- 冷却液温度传感器
- 氧传感器
确定并安装发动机管理系统的传感器:
发动机管理系统需要许多传感器。 传感器充当系统的“输入”。 传感器将物理量转换为可由计算机(在本例中为 MegaSquirt)处理的电信号。
MegaSquirt 的组装过程必须考虑要安装在发动机上的组件,因为 MegaSquirt 的结构可能有所不同。
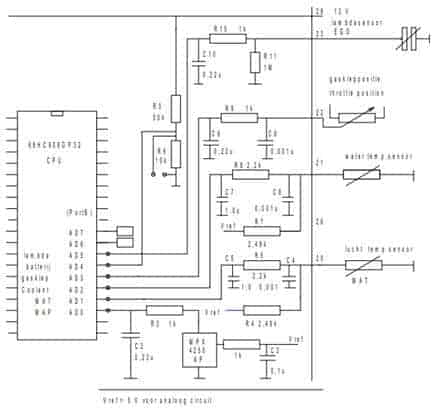
该图显示了这些组件所在的不同传感器电路。 图中所示的输入信号来自氧传感器、节气门位置传感器、冷却液温度传感器和空气温度传感器。
除了传感器之外,该图中还包含许多电阻器和电容器。 这些成分的组合形成过滤器; 这些滤波器用于捕获干扰信号和噪声。 如果传感器信号因噪声而失真,这可能会对执行器的控制产生重大影响,从而也会对电机的运行产生重大影响。
曲轴位置传感器:
发动机管理系统的一个重要输入是曲轴转速。
使用曲轴位置传感器和脉冲轮测量曲轴速度。 曲轴位置传感器有两个重要功能:
- 根据信号的频率可以确定曲轴转速;
- 脉冲轮中的缺齿表示 1 号和 4 号气缸的活塞位于上止点之前几度的曲轴位置。
发动机转速影响喷油器和点火的控制。 36-1 脉冲轮中缺失的齿对于确定点火和喷射时间非常重要。 决定使用霍尔传感器而不是感应脉冲发生器作为速度传感器。 电感式传感器产生交流电压,必须在 MegaSquirt 控制器中将其转换为直流电压。 霍尔传感器产生方波电压,通过内部或外部上拉电阻将其放大至 5 或 12 伏电压。 这使得霍尔传感器更适合形成可靠的信号。 必须在组装 MegaSquirt 之前提前做出此选择; 两种传感器需要不同的电路结构。
脉冲轮:
曲轴位置传感器测量安装在发动机上的脉冲轮的气隙变化。 然而,路虎发动机最初没有曲轴位置传感器,因此没有脉冲轮。 因此必须随后安装脉冲轮。 人们对脉冲轮的位置和位置进行了很多思考。 可能性是:
- 具有 36 个齿的圆盘,通过夹具或螺栓连接方式固定在曲轴皮带轮的外侧。
- 通过铣削皮带轮齿来调整当前的曲轴皮带轮。
通常使用 36-1 或 60-2 脉冲轮。 60齿脉冲轮主要用于较大直径。 36-1因其齿宽而适合使用。 脉冲轮的高度行程尽可能小,这一点非常重要。 高度变化意味着传感器和脉冲轮齿之间的磁场变化。 这会对发动机的运行产生不利后果。 这当然必须防止。 因此,最好调整当前的曲轴皮带轮。 现有曲轴皮带轮的外缘是在铣床上加工的。 凹口是通过去除材料而形成的。 其余 36 个齿用于让传感器测量磁场的变化。 已磨掉一颗牙齿作为参考点。 下图为加工后的曲轴皮带轮。
磨齿在脉冲轮顶部、传感器正下方可见。 当曲轴处于此位置时,并不意味着 1 号和 4 号气缸的活塞处于上止点,而是这些活塞在上止点之前 90 度,对应于 9 个齿 (360/36)。 当缺失的牙齿经过时,MegaSquirt 会收到一个信号,表明应该很快点火。 从那时起,将计算何时应激活点火线圈。 在不同的操作条件下,预点火时间也根据该参考点确定。

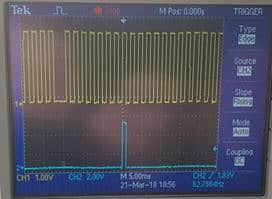
示波器图像(见图)显示了曲轴信号(顶部)与点火线圈控制信号(底部)的比较。 点火线圈的控制脉冲在缺失齿之后的第八个齿处形成。 当发动机怠速时,点火提前10度,相当于1齿。 这对应于移除的齿和实际上死点之间的 90 度(9 个齿)。
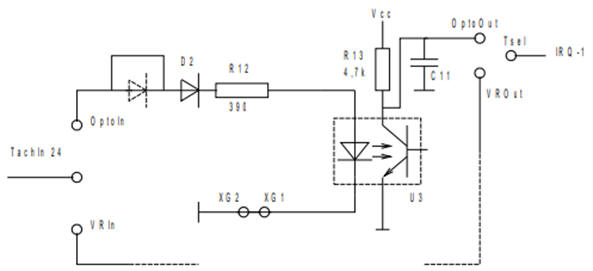
为了在 MegaSquirt 中组装霍尔传感器电路,必须安装电容器 C11、电阻器 R12 和 R13、二极管 D2 和光耦合器 U3(见下图)。 来自霍尔传感器的信号进入图 105 中“Opto in”下的图表。 信号通过二极管和电阻到达所谓的光耦合器。 该组件用虚线表示。 光耦合器是一个小型集成电路,其中左侧的 LED 在点亮时导通右侧的光电晶体管。 光耦合器可以看作是控制部分和开关部分之间没有机械或电气连接的开关。
当光耦合器中的晶体管导通时,会有小电流从Vcc流到地。 此时“Opto Out”上的电压为 0 伏。 如果晶体管不导通,则没有电流,因此电阻器 R13 上没有压降。 “Opto out”上的电压为 5 伏。
通过使用光耦合器,在二极管和光电晶体管之间实现电流隔离。 由于击穿电压通常大于 5 kV,因此危险的干扰电压不会进入微控制器电路。
地图传感器:
MAP 传感器(歧管绝对压力传感器)测量进气歧管中的压力。 MegaSquirt 使用该压力、发动机转速和入口温度来计算进入发动机的空气量。 对于路虎发动机,将测量绝对压力(外部气压)或负压。 这是一种自然吸气式发动机,会吸入自己的空气。 配备涡轮增压器的发动机必须应对进气歧管中的超压。 MAP 传感器的测量范围通常在 0,2 至 1.1 bar 之间。
进气歧管中的压力以及节气门的开度(通过节气门位置传感器测量)和发动机转速可以确定发动机负荷。 由于没有MAF传感器(歧管空气流量),吸入的空气量是根据发动机数据和进气歧管中的负压来计算的。 我们决定不使用 MAF 传感器,因为它不是为发动机设计的,信号不太可靠。 将设置与进气歧管属性相匹配非常复杂。 为此需要许多校正因子。
使用的MPX4250AP MAP传感器如图所示。 MegaSquirt 电路板标配有适用于此类 MAP 传感器的连接选项。 该传感器也作为标准配置包含在构建套件中。 喷射的燃料量尤其取决于存在的空气量,因为试图实现化学计量混合比(14,68千克空气比1千克燃料)。 可以选择不同时使用 MAF 和 MAP 传感器。 然后吸入的空气量将根据所谓的 Alpha-N 规则来确定。 考虑到燃气阀的位置,这对于存在的空气量是决定性的。 然而,它的精度不如 MAP 传感器,因此没有选择它。 在本项目中,节气门位置传感器仅用于加速浓缩。

冷却液温度传感器:
在经典设置中,发动机缸体上没有温度传感器。 该发动机标配双金属件,具有在冷却液温度过高时打开仪表板灯的功能。 由于发动机管理系统确实考虑了冷却液和进气的温度,因此决定改装 NTC 电阻。 NTC 电阻具有负温度系数。 这意味着电阻值随着温度升高而降低。 选择的冷却液温度传感器是 2,5⁰ 摄氏度时电阻值为 25 kΩ 的传感器。 在最重要的温度范围内电阻变化最大。 必须绘制 NTC 电阻的特性才能计算正确的温度。
当温度范围在 0⁰C 到 60⁰C 之间变化时,电阻变化最大。 这可以从特性的过程中看出; 在上述温度范围内,电阻下降约 5kΩ,而在 T ≥ 60⁰C 时,电阻几乎不下降。 在某些情况下,还需要测量 60°C 以上的温度。 为了实现这一点,可以在特定温度下将内部偏置电阻器切换为不同值的偏置电阻器。 这产生了两个 NTC 特性。 然而,在该项目中,冷却剂温度专门用于冷启动浓缩,在60℃以上几乎不使用。
低温也是最有趣的。 冷启动浓缩将在这里进行; 当发动机处于冷态时,喷油器的启动时间会更长。 当发动机充分预热(T ≥ 60⁰C)时,加浓的情况会越来越少。 从 T = 90⁰C 开始,注入策略根据参考字段中的设定值运行。 参考字段是输入的默认值。 外部因素,例如低温下的冷启动浓缩,形成该标准值的修正因子。 MegaSquirt 不再考虑冷却剂温度。
氧传感器:
拉姆达传感器(传感器)安装在排气装置中,用于测量废气中的空气/燃料比。 lambda 传感器的一项重要任务是通过完成 AFR 和 VE 表来在后期“调整”发动机管理。 为了深入了解理想的混合比以及富集或贫化的有用性和必要性,首先定义化学计量混合比、富集和贫化。
化学计量混合比表示空气和燃料之间的比率,其中使用了空气中的所有氧气。 比例为 14,68:1(四舍五入为 14,7 千克空气比 1 千克汽油)。 然后我们讨论 λ = 1。
不同工作条件下的 lambda 值可能会有所不同:
- 富集度:λ<1;
- 贫困: λ > 1。
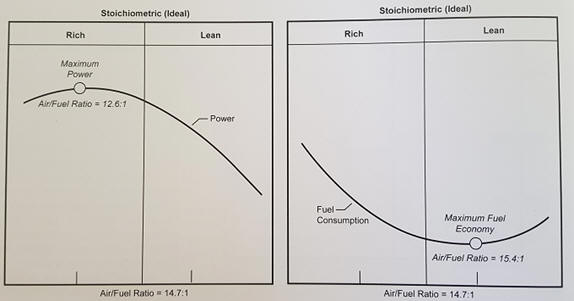
加浓至 λ = 0,8 意味着适用 11,76 kg 空气与 1 kg 汽油的混合比。 因此,燃烧 1 公斤燃料所需的空气较少。 富集或消耗混合物必须始终保持在爆炸极限之内。 当发动机必须提供更多动力时就会发生浓缩。 较浓的混合物还可以提供冷却作用。 另一方面,稀薄的混合物可以提供更好的燃油消耗。 下图显示了两个图表,显示了最大功率和最低油耗。
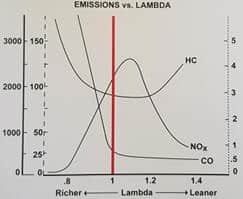
拉姆达值不仅影响功率和油耗,还影响废气排放。 更浓的混合物可确保更低的氮氧化物含量,但也能提高二氧化碳和碳氢化合物的排放量。 混合物较稀时,燃料颗粒之间的距离更远,因此燃烧不再是最佳状态; 结果HC排放量也增加。 下图显示了与 lambda 值相关的排放。 当使用催化剂时,需要确保喷射在浓和稀之间不断交替。 在浓混合气中,由于缺氧而形成一氧化碳,催化剂利用它还原氮氧化物。 稀混合气含有过量的氧气,会氧化 CO 和 HC。
氧传感器有两种类型: 跳跃传感器和宽带传感器。 MegaSquirt 支持这两种类型。 然而,在设置VE表时,跳跃传感器不适合,因此选择使用宽带传感器。 VE表是通过根据测量的AFR调整VE值来设置的。 尽管原则上可以通过计算输入 VE 值,并且很大程度上基于扭矩曲线,但 AFR 很快就会超出跳跃传感器的范围。 宽带传感器因其测量范围大而提供了一种解决方案; 它可以测量 8,0 到 1,4 之间的 AFR。 当发动机运行时,几乎所有情况下混合物成分都会在此测量范围内,因此宽带传感器适合设置 VE 表。 没有宽带传感器的调谐实际上是不可能的。
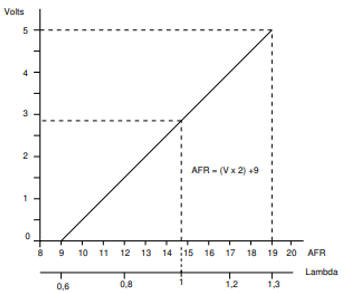
MegaSquirt 没有内部 lambda 控制器。 一旦知道宽带传感器的属性,就可以将它们输入到 TunerStudio 程序的表格中。 在其他情况下,需要带有外部控制器的宽带传感器。 输出电压已通过外部控制器实现线性化。 从控制器到 MegaSquirt 的输出电压在 0 至 5 伏之间,lambda 值与电压之间呈线性关系。 电压值在 MegaSquirt 中转换为 lambda 值。 该图显示了具有线性梯度的图。
下: 执行器.