翁德沃彭:
- 控制技术
- 基于操作条件的过程控制
控制技术:
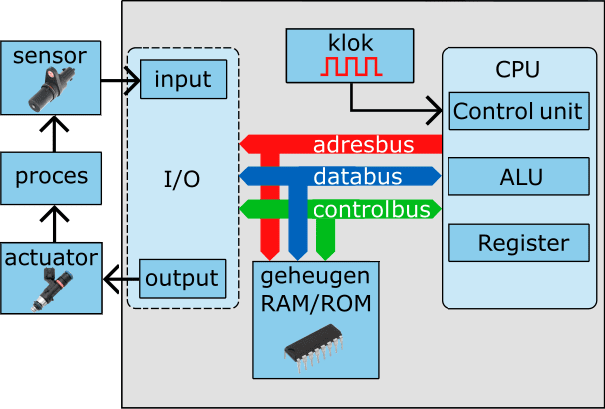
ECU 测量、控制和调节过程。 ECU 接收来自传感器的信息。 传感器将物理量的变化转换为电信号。 该传感器信息通过输入进入 ECU。 可能的输入信号来自:
- 速度传感器;
- 温度感应器;
- 负载(负压)传感器;
- 氧传感器。
传入的信息不一定会直接导致采取行动。 只有当测量值偏离期望值时,才能调整执行器的控制。 ECU则具有“调节”功能。 是/否决定是通过预编程的计算机程序(ROM / 闪存)做出的。
测量: 传感器(在本例中为传感器)测量物理量并将其转换为电信号。 该测量值 (X) 被发送至控制器。 测量值不一定会直接导致行动; 想想恒温。

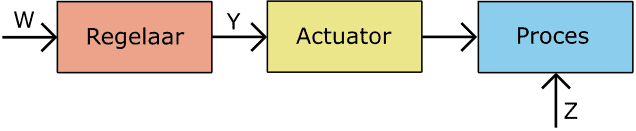
驾驶: 控制器(ECU)控制执行器。 没有来自传感器的反馈,因此 ECU 不遵循处理顺序。 因此,过程中的错误并不总是能够被识别出来。 控制的一个例子是手动操作喇叭(W); 操作开关时,ECU 控制喇叭 (Y)。 喇叭上没有控制功能,因此无法识别故障(Z)。
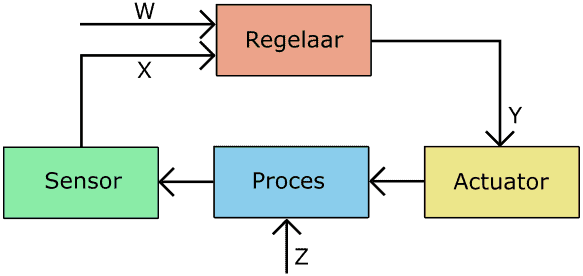
安排: 控制器可以将手动命令 (W) 或测量的传感器值 (X) 处理到执行器控制中。 执行器导致过程发生变化; 例如,考虑注射持续时间。 注入更多意味着混合物更丰富。 氧气含量由 lambda 传感器测量,并将测量值 (X) 传输至控制器。 当出现不可预见的故障(例如喷油器堵塞)时,会导致过程发生变化 (Z)。 这种偏差也由传感器测量,以便控制器可以通过执行器控制来调整过程。
根据操作条件进行过程控制:
内燃机的发动机管理系统必须在所有运行条件下以最佳方式燃烧混合物。 确定混合气成分和点火正时对于保证废气成分(排放)、经济性和实现所需功率至关重要。
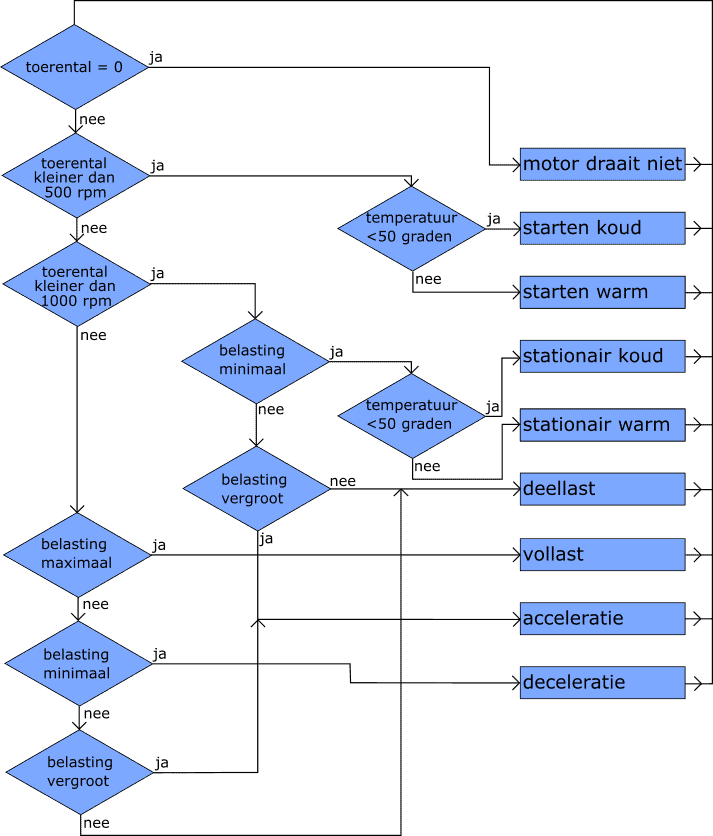
每个操作条件都有自己的控制技术:
- 冷启动:混合气浓,点火晚;
- 热启动:混合物比冷启动期间不太浓;
- 冷怠速:混合气丰富,怠速提高;
- 热怠速:怠速较低时,混合气不太浓;
- 部分负荷:混合气化学计量,速度范围在 1500 至 4000 rpm 之间,点火正时已预先确定,lambda 控制处于活动状态;
- 满载:混合料浓,负载高,速度高;
- 加速:混合气浓,点火晚;
- 减速:混合气稀,点火早。
相关页面: