翁德沃彭:
- 太阳轮、行星架和齿圈
- 自动变速箱
- 行星齿轮系统变速器
- 计算一档传动比
- 计算二档传动比
- 计算第三档传动比
太阳轮、行星架和齿圈:
行星齿轮系统由至少一组齿轮组成,每组齿轮具有太阳轮、行星架和齿圈。 因此需要有关行星齿轮系统操作的基本知识(例如转动太阳齿轮、带有卫星齿轮的行星架和环形齿轮,请参见第 自动变速箱).
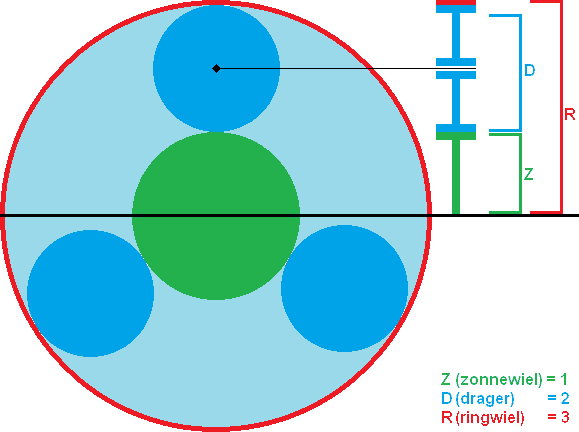
下面是齿轮组的图像,其中太阳齿轮为绿色,带有卫星齿轮的托架为蓝色,环形齿轮为红色。 清晰可见齿轮组被分成两部分。 计算是通过方程式完成的,因此即使所有内容都除以二也没关系。 毕竟,比例保持不变。
在本页的进一步内容中,我们将使用比率 Z、D 和 R 进行计算。通过遵循连接各个行星系统的线,可以使用所有 Z、D 和 R 的比率来确定相关齿轮的总传动比。
自动变速箱:
传统的自动变速箱通过在不同的行星齿轮系统之间切换来工作,请参阅章节 自动变速箱。
下面是自动变速器中四组行星齿轮系统的示意图。 共有三种前进档系统和一种倒档系统。 红线表示通过自动变速器的力的方向; 从左侧(带变矩器的发动机侧)穿过带有行星系统的完整部件(黑线)到传动轴的联轴器。 如果您仔细观察变速箱中的系统,您会发现上图是由它们衍生的。 变速箱中使用了四个系统,每个系统都有 Z、D 和 R(太阳轮、行星架和齿圈)。

行星齿轮系统在中心线上方和下方对称。 没有其他办法,因为行驶时内部会旋转。 为了深入了解齿轮啮合时发生的情况,下图中行星系统中的从动部件也以红色突出显示:

在上图中,齿轮 1 已啮合。 要接合 1 档,必须接合离合器。 该链接显示为蓝色。 对于闭式联轴器和行星系统的一侧从动侧,一个部件也必须旋转。 在这种情况下,零件的尺寸决定了传动比(想象一下小输入齿轮和大输出齿轮;大齿轮将旋转得更慢。如果大齿轮的齿数是小齿轮的两倍,那么比例为 1:2)。
原则上,这也适用于自动变速器; 所有四个系统中的环形齿轮、太阳齿轮和卫星齿轮的尺寸都不同。 现在您可能可以想象,当另一个离合器通电时(例如左侧的系统),输出轴的速度发生了变化。
在本页的进一步内容中,图像、解释和计算解释了自动变速器中的行星齿轮系统在行驶时如何换档。
行星齿轮系统变速器:
我们现在要看看变速箱的上半部分(因为盒子上下对称,见下图)。 根据该图像,我们将确定页面稍后的传输情况。 系统上方显示系统编号; 从1到3和系统R(反向)。
每个星系都有自己的 Z、D 和 R。图像中未显示这一点,但如果您再次查看本页顶部的图像,您就会认出它。 这将在本页稍后被视为已知。
在图像的左下角,您可以看到耦合“K4”,该耦合确保系统的两侧同时连接; 系统 3 连接到系统 1 和 2。 没有其他连接被关闭,因此整个系统被“阻塞”。 发动机转速以1比1的方式传递给车辆的车轮,无传动比; 我们称之为直接价格。 这是第四档。
在配备手动变速箱的汽车中,第四档通常也是直接驱动的。 在这里,发动机转速也以 1 比 1 的比例传输到车轮。
输入轴(发动机或液力变矩器)和输出轴(车辆)的速度差称为传动比。

第一档已接合。
通过固定系统 I 的托架(使用联轴器 K1),力可以从太阳轮传递到托架。 载体与车辆相连,因此发动机和变速箱之间现在有直接连接。 零件的尺寸决定了齿轮比(稍后会详细介绍)。
红线表示力的级数。 绿线表示哪些其他组件正在运行,因为它直接连接到红线。 这些部件确实旋转,但由于离合器没有通电,因此它们不会发生任何变化。 他们只是闲着。 蓝线表示耦合器 K1 通电时固定的情况。 这样不仅系统1的行星架被固定,而且系统3的行星架和系统R的太阳轮也被锁定。

如上所述,当换入一档时,离合器 K1 通电。 当换至二档时,离合器K1将脱开,另一个离合器将通电。 这可以从表中看出。
当换至二档时,离合器K2将通电。 然后固定系统2的齿圈。 由于系统2的太阳轮是固定的,并且太阳轮被驱动,因此托架将旋转。 该载体将依次驱动系统 1。 在系统1中,齿圈这次没有被阻挡,而是由另一个系统驱动。 在这种情况下,输出速度(车辆的线)将因此具有比换档第一档时更低的速度。

本页通过图像、解释和计算进一步阐明了这一点。
计算一档传动比:
根据下表,链接K1已关闭。 因此环形齿轮被锁定。 来自发动机的驱动力通过太阳轮并通过行星架传递至车辆。 还给出了比率,即系统 1,00 的太阳轮为 3,00,齿圈为 1。我们将以此进行计算。
计算行星齿轮系统传动比的基本公式如下:
ω 代表 欧米茄 并且是 角速度 转弯时。
因为我们用系统1计算,所以我们在所有内容后面加1。 我们为以下系统更改此数字。 特别是在多个系统的情况下(一个系统驱动另一个系统),必须这样注意,因为否则会变得非常混乱。
下图是第一档的示意图。 为清楚起见,Z(太阳轮)、D(行星架)和 R(齿圈)以蓝色绘制。


我们现在填写第一个系统的基本公式。 欧米伽身份不明,佩戴者一动不动。 所以我们不能为此填写任何内容。 Z1和D1是已知的,所以我们将它们填入。 R1 是静止的,所以我们把它划掉。 我们不会在公式中添加任何东西。
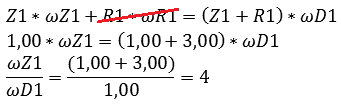
现在您可以看到第一档的传动比为 4。
在汽车技术中,这种情况永远不会发生,它总是略高于或低于 4,因为否则齿轮总是在同一表面上相互接触(额外磨损)。 但这里作为例子计算起来更容易。 您现在还可以看到 omega 已被知晓!
ωZ1 = 4
ωD1 = 1
这些欧米茄是系统中轴的角速度。 欧米茄在一档中并不重要,但在计算双驱动系统时(如在二档中将变得清晰),它们很重要。
计算二档传动比:
在计算第二档传动比时,必须考虑到第一系统是双驱动的; 系统1的太阳轮由电机驱动,托架由系统2驱动。 现在,这导致与环形齿轮静止的情况(例如第一档)不同的车辆速度。

在计算时,我们总是从仅被驱动的系统开始。 在这种情况下,它是系统 2,因为它仅由电机通过太阳轮驱动。
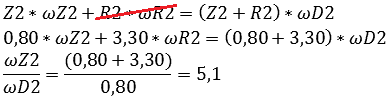
第二系统执行的传输是5,1。 这不是发动机和车轮之间的传动,而是发动机和系统 1 之间的传动。现在我们将使用系统 1 的数据计算系统 2 的传动比,因为现在已知欧米茄:
ωZ2 = 4,1
ωD2 = 0,8
如果您现在查看该图,您将看到系统 1 和 2 的太阳轮相互连接。 系统 2 的行星架和系统 1 的齿圈也相互连接。 连接部分的欧米伽是相同的,所以我们可以说:
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
仔细观察这一点非常重要! 始终遵循图中的线条。
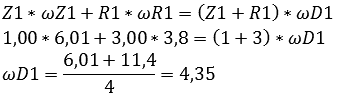
现在我们将这些 omega 输入到系统 1 的计算中。
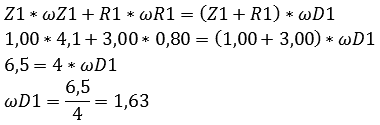
现在,我们可以通过输入欧米茄除以输出欧米茄来确定最终的最终传动比。 如果我们看一下该图,我们会发现太阳齿轮系统 2 的 omega 为传入,而行星架系统 1 的 omega 为传出。
因此,2 档的总传动比为 2,52。
计算三档传动比:
在计算第三档时,必须考虑到所有三个系统一起工作。 始终从单驱动系统开始。 在本例中是第三个:

系统3的太阳轮是固定的,因此不参与。 然后输入其余的所有值:
由此我们得到:
然后我们进入系统 2。您在系统 3 的计算中输入系统 2 已知的 omega:
现在我们进入系统 1。这里也输入了已知的 omega:
最终我们得到:
即三档总传动比为1,38。
计算第四档传动比:
在四档时,离合器 K4 闭合。 这意味着系统 1、2 和 3 的太阳轮同时连接到电机。 整个系统现在被封锁。 所有omega都是平等的。
如果所有欧米茄都相等,则不可能有齿轮比。 发动机转速直接传输至车轮。 我们称之为直接价格。